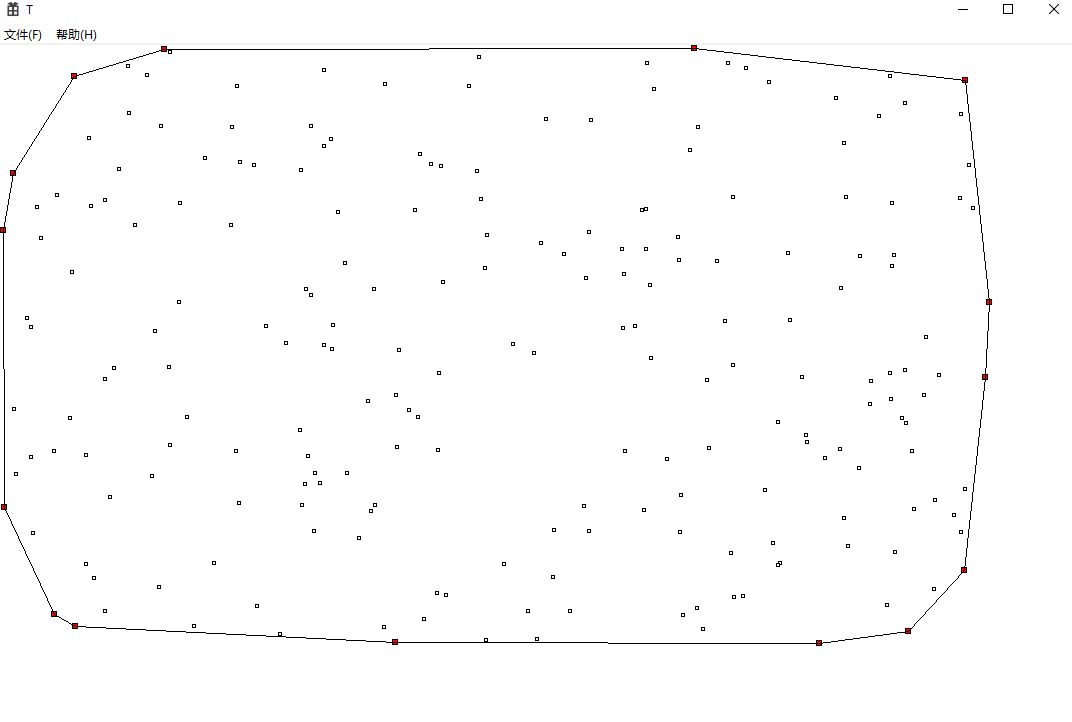
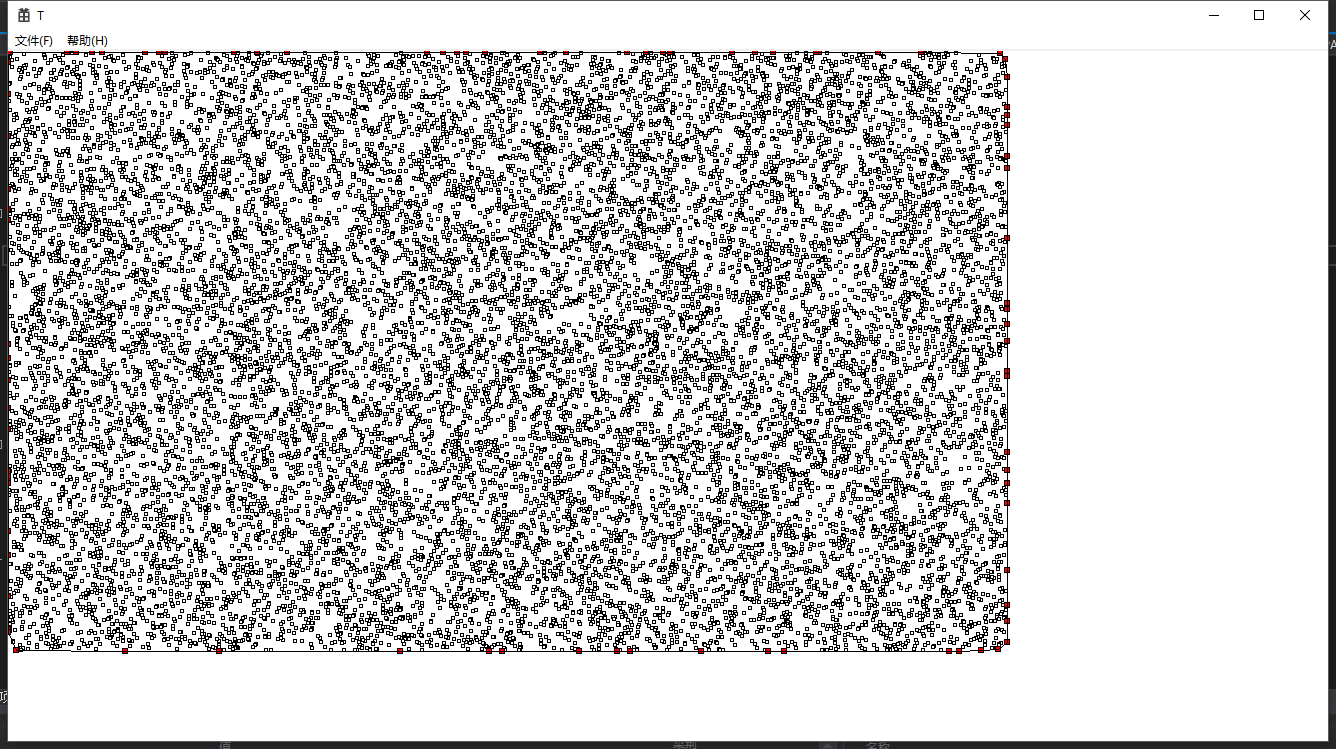
C++ 凸包生成算法
由于我的极差记忆力,我打算把这个破玩意先记下来。因为以后会有改动(Delaunay三角网生成算法),我不想把一个好的东西改坏了。。。
好吧……
凸包生成算法,:
1.先在指定的宽(width)高(height)范围内生成一堆随机点;
1.1. 生成N个不重复的正整数,使用洗牌算法让生成的数字不重复;
1.2. 将每个数字分解成坐标。可以设想一个二维数组,每个数字依次填进数组内。那么,对于数字A来说,它能够生成的坐标则为:
BugFix:
1.一系列的在VS2017(v141)无法编译通过的问题(SDK版本:10.0.17763.0)。
这其中包括STL模板参数中不允许存在const、va_start函数中不允许有引用变量、for each - in关键字被否决等等问题。
Note:
- 重做,将成员函数改成了由index代表的点,而不是原来的存放点的原型。(2019.4.9)
- 懒病作祟,有些代码值得优化,但现在没有那么做。
以下是代码……C++11
项目选项为 多字符集
File: stdinc.h
#include <cmath>
#include <random>
#include <stdarg.h>
#include <string>
#include <exception>
#include <vector>
#include <stack>
#include <map>
#include <set>
#include <cassert>
#include <windows.h>
#pragma once
#ifdef _DEBUG
#define ErrorThrow(errMsg) { LogThrow::ErrorOccur(errMsg, __FILE__, __LINE__);}
#else
#define ErrorThrow(errMsg) {}
#endif // _DEBUG
#include <iostream>
static const double PI = 3.14159265358980/*...80... -> ...7932384626...*/;
static const double precision = 1000.0;
static const double doubleESP = 1e-008;
namespace LogThrow
{
static void ErrorOccur(const std::string& errMsg, const std::string& fileName, int line)
{
std::string msg("[ERROR] " + errMsg + '\n' + "File: " + fileName + '\n' + "Line: " + std::to_string(line));
std::logic_error(msg.c_str());
MessageBox(NULL, msg.c_str(), NULL, MB_ICONINFORMATION | MB_OK);
ExitProcess(0);
}
};
namespace MyMathTools
{
inline static bool LessThan(double a, double b)
{
if (a - b < doubleESP)
{
return true;
}
return false;
}
inline static bool IsEqual(double a, double b)
{
if (std::abs(a - b) <= doubleESP)
{
return true;
}
return false;
}
};
File: Point2D.cpp
#include "stdinc.h"
#pragma once
//Point & Vector
template<typename T>
class Point2D
{
private:
public:
typedef std::vector<Point2D<T>> Points;
T x, y;
public:
Point2D(T nx, T ny) :x(nx), y(ny)
{
}
Point2D() :Point2D{ 0, 0 }
{
}
Point2D(const Point2D& np) :Point2D{ np.x, np.y }
{
}
void Init(T x, T y)
{
this->x = x;
this->y = y;
}
void Transposition()
{
T total = x + y;
x = total - x;
y = total - y;
}
void operator= (const Point2D& np/*new point*/)
{
Init(np.x, np.y);
}
bool operator== (const Point2D& pointOther) const
{
if ((pointOther.x == this->x) &&
(pointOther.y == this->y))
{
return true;
}
return false;
}
friend std::ostream& operator<<(std::ostream& out, const Point2D& pt)
{
out << "(" << pt.x << "," << pt.y << ")";
return out;
}
public:
//[min, max)
/*const */Point2D& RandomPoint(int maxX, int maxY)
{
if (maxX <= 0 || maxY <= 0)
{
std::logic_error("The less then 0!");
}
std::random_device rd;
std::mt19937 mt(rd());
this->x = mt() % maxX;
this->y = mt() % maxY;
//I can modify the left value.
return *this;
}
template<typename T1, typename T2>
static double Distance(const Point2D<T1>& ptA, const Point2D<T2>& ptB)
{
double cutX = ptB.x - ptA.x;
double cutY = ptB.y - ptA.y;
return std::pow((cutX * cutX + cutY * cutY), 0.50);
}
template<typename T1>
double Distance(const Point2D<T1>& ptOther)
{
return Point2D::Distance<T, T1>(*this, ptOther);
}
//Without repetition: Shuffle algorithm.
static void RandomPoints(int count, int maxX, int maxY, std::vector<Point2D<int>>& __out points)
{
//auto LcmFunc = [maxX, maxY](int numA, int numB)
//{
// int max = (maxX > maxY) ? maxX : maxY;
// int min = maxX + maxY - max;
// long lcm = -1;
// for (int i = 1; i <= min; ++i)
// {
// lcm = static_cast<long>(max * i);
// if (lcm % min == 0)
// {
// break;
// }
// }
// return lcm;
//};
//int lcm = static_cast<char32_t>(LcmFunc(maxX, maxY));
//if (lcm == -1)
//{
// return false;
//}
if (count >= maxX * maxY * 0.5)
{
ErrorThrow("Error Count.");
}
points.clear();
auto GetX = [maxX](int num)
{
return num % maxX;
};
auto GetY = [maxX](int num)
{
return (num % maxX == 0) ? num / maxX : num / maxX + 1;
};
static std::random_device rd;
static std::mt19937 mt(rd());
const long total = maxX * maxY;
std::vector<long> nums;
nums.resize(total);
points.resize(count);
for (long i = 0; i < total; ++i)
{
nums[i] = i;
}
for (int i = 0; i < count; ++i)
{
//It is array nums index.
long randomNum = mt() % (total - i) + i;
std::swap(nums[i], nums[randomNum]);
//Swap over, the num[i] is new random number.
//Get the point.
points[i] = { GetX(nums[i]), GetY(nums[i]) };
}
}
};
template<typename T>
class Vector2D final : public Point2D<T>
{
public:
Vector2D() : Point2D<T>()
{
}
Vector2D(T nx, T ny) : Point2D<T>(nx, ny)
{
}
Vector2D(const Vector2D& np) :Point2D<T>(np)
{
}
double Length() const
{
return std::pow((this->x * this->x + this->y * this->y), .5);
}
//Vector AB
void Vector(const Point2D<T>& ptA, const Point2D<T>& ptB)
{
this->Init(ptB.x - ptA.x, ptB.y - ptA.y);
}
double Radian(const Vector2D& otherVec, bool isQuadrant = true) const
{
return Vector2D::Radian(*this, otherVec, isQuadrant);
}
//anti-clockwise angle.
//If the return value less than 0, the Radian is less than π.
static double Radian(const Vector2D& vec1, const Vector2D& vec2, bool isQuadrant = true)
{
if (isQuadrant)
{
//CHECK IT:
double radian = std::atan2(vec2.y, vec2.x) - std::atan2(vec1.y, vec1.x); //return [-2π, 2π]
if (radian < 0)
{
radian += 2 * PI;
}
return radian;
}
return std::acos(Vector2D::Dot(vec1, vec2) / (vec1.Length() * vec2.Length())); //return [0, π]
}
double Angle(const Vector2D& otherVec, bool isQuadrant = true) const
{
return Vector2D::Angle(*this, otherVec, isQuadrant);
}
//The same as function Radian.
static double Angle(const Vector2D& vec1, const Vector2D& vec2, bool isQuadrant = true)
{
return Vector2D::Radian(vec1, vec2, isQuadrant) / PI * 180;
}
T Dot(const Vector2D& otherVec) const
{
return Vector2D::Dot(*this, otherVec);
}
static T Dot(const Vector2D& vec1, const Vector2D& vec2)
{
return vec1.x * vec2.x + vec1.y * vec2.y;
}
T Cross(const Vector2D& otherVec) const
{
return Vector2D::Cross(*this, otherVec);
}
//2D Vector have no cross. But we can set the Z is 0.
//So , return a value is (0, 0, Ax*By - Ay*Bx);
static T Cross(const Vector2D& vec1, const Vector2D& vec2)
{
return vec1.x*vec2.y - vec1.y*vec2.x;
}
};
File: ConvexHull.h
#pragma once
//#include "Line.cpp"
#include "Point2D.cpp"
#include "stdinc.h"
#include "ObjectSign.h"
typedef ObjectSign<Point2D<int>> Points;
using PointNode = ONode<Point2D<int>>;
class ConvexHull final
{
private:
Points m_points;
Points m_CHpoints;
public:
void operator= (const ConvexHull&) = delete;
ConvexHull();
ConvexHull(const Points& points);
~ConvexHull();
public:
//void TestPoints();
//void AddPoint(const Point2D<int>& __in newPoint);
//void AddRandomPoints(int count, int maxX, int maxY);
void GetConvexHullPoints(Points& __out points);
void GetAllPoints(Points& __out points);
void Generate();
void Clear();
private:
void SortPoints();
};
File: ConvexHull.cpp
#include "ConvexHull.h"
#include <algorithm>
ConvexHull::ConvexHull()
{
}
ConvexHull::ConvexHull(const Points& points) : m_points(points)
{
//this->~ConvexHull();
//m_points = points;
}
ConvexHull::~ConvexHull()
{
}
//void ConvexHull::AddPoint(const Point2D<int>& __in newPoint)
//{
// m_points.Add(newPoint);
//}
void ConvexHull::GetConvexHullPoints(Points& __out points)
{
points = m_CHpoints;
}
void ConvexHull::GetAllPoints(Points& __out points)
{
points = m_points;
}
////Without repetition: Shuffle algorithm.
//void ConvexHull::AddRandomPoints(int count, int maxX, int maxY)
//{
// std::vector<Point2D<int>> pointsArray;
// Point2D<int>::RandomPoints(count, maxX, maxY, pointsArray);
//
// m_points.Clear();
// for (int i = 0; i < count; ++i)
// {
// const Point2D<int>& eachpt = pointsArray.at(i);
// m_points[i] = eachpt;
// }
//}
void ConvexHull::SortPoints()
{
if (m_points.Size() == 0)
{
ErrorThrow("Empty Points.");
return;
}
//Selecting a point what Y min.
Point2D<int> pointYmin;
m_points.Get(0, pointYmin);
for(int i = 0; i < m_points.Size(); i++)
{
if (!m_points.IsExist(i))
{
continue;
}
const Point2D<int>& eachpt = m_points[i];
if (eachpt.y < pointYmin.y)
{
pointYmin = eachpt;
}
else if (eachpt.y == pointYmin.y)
{
if (eachpt.x < pointYmin.x)
{
pointYmin = eachpt;
}
}
}
auto SortRuleFunc = [&pointYmin](const ONode<Point2D<int>>* pnA, const ONode<Point2D<int>>* pnB) -> bool
{
static const Vector2D<int> baseVecX = { 1, 0 };
Point2D<int> ptA = pnA->_node;
Point2D<int> ptB = pnB->_node;
Vector2D<int> vecA;
vecA.Vector(const_cast<const Point2D<int>&>(pointYmin), ptA);
Vector2D<int> vecB;
vecB.Vector(pointYmin, ptB);
double radianA = Vector2D<int>::Radian(baseVecX, vecA);
double radianB = Vector2D<int>::Radian(baseVecX, vecB);
//If collinear occurs, the nearest is before.
if (std::abs(radianA - radianB) <= doubleESP)
{
return vecA.Length() < vecB.Length();
}
//return (radianA - radianB) < doubleESP; //ERROR: ATTENTION: Check the Strict Weak Ordering...
return radianA < radianB; //Ascending order.
};
m_points.Sort(SortRuleFunc);
}
void ConvexHull::Generate()
{
const int pointsCount = static_cast<int>(m_points.Size());
if (pointsCount < 3)
{
ErrorThrow("Points count too less.");
return;
}
SortPoints();
std::stack<PointNode> stackCHpt;
stackCHpt.push(*(m_points.GetBySequence(0)));
stackCHpt.push(*(m_points.GetBySequence(1)));
int ptIndex = 2; //Total is m_points.size().
while (ptIndex < pointsCount)
{
PointNode pnO = stackCHpt.top();
const Point2D<int>& ptO = pnO._node;
stackCHpt.pop();
PointNode pnA = stackCHpt.top();
const Point2D<int>& ptA = pnA._node;
stackCHpt.push(pnO);
PointNode pnB = *(m_points.GetBySequence(ptIndex));
Point2D<int> ptB = pnB._node;
Vector2D<int> vecA, vecB;
vecA.Vector(ptO, ptA);
vecB.Vector(ptO, ptB);
//Vector B turn to Vector A.
double angle = Vector2D<int>::Angle(vecB, vecA);
if ((angle - 0 >= 0) && (angle - 180 <= doubleESP))
{
stackCHpt.push(pnB);
ptIndex++;
}
else
{
stackCHpt.pop(); //pop point O.
}
if (stackCHpt.size() < 2)
{
//If the sort rule is not ok...
ErrorThrow("Error stackCHpt size.");
return;
}
}
/*Over Generation.*/
//
int lengthCHPoint = static_cast<int>(stackCHpt.size());
m_CHpoints.Clear();
for (int i = 0; i < lengthCHPoint; ++i)
{
const PointNode& pn = stackCHpt.top();
m_CHpoints.Add(pn);
stackCHpt.pop();
}
}
void ConvexHull::Clear()
{
m_CHpoints.Clear();
m_points.Clear();
}
//void ConvexHull::TestPoints()
//{
// AddPoint({ 0, 0 });
// AddPoint({ 5, 1 });
// AddPoint({ 9, 2 });
// AddPoint({ 1, 1 });
// AddPoint({ 13, 6 });
// AddPoint({ 12, 7 });
//}
File: Line.cpp (暂时没用到)
#include "Point2D.cpp"
#include <array>
#include <iostream>
#pragma once
template<typename T>
class Line
{
public:
struct Equation
{
public:
T A, B, C;
public:
//Ax + By + C = 0
Equation()
{
}
Equation(const Point2D<T>& ptA, const Point2D<T>& ptB)
{
(*this)(ptA, ptB);
}
public:
void operator() (const Point2D<T>& ptA, const Point2D<T>& ptB)
{
A = ptB.y - ptA.y;
B = ptA.x - ptB.x;
C = ptB.x * ptA.y - ptA.x * ptB.y;
}
double GetY(double X)const
{
if (B == 0)
{
return INT_MAX;
}
return -1.0 * (C + A * X) / B;
}
double GetX(double Y) const
{
if (A == 0)
{
return INT_MAX;
}
return -1.0 * (C + B * Y) / A;
}
void GetSlope(Vector2D<double>& __out slope) const
{
if (B == 0) //X === -1.0 * C / A;
{
slope = { 0, -1.0 * C / A };
return;
}
slope = { 1, -1.0 * A / B };
}
};
private:
bool CheckLine(const Point2D<T>& ptA, const Point2D<T>& ptB) const
{
if (std::abs(ptA.x - ptB.x) <= doubleESP &&
std::abs(ptA.y - ptB.y) <= doubleESP)
{
return false;
}
return true;
}
public:
Line() : Line({ 0, 0 }, { 1, 0 })
{
}
Line(const Point2D<T>& a, const Point2D<T>& b) : ptA(a), ptB(b)
{
if (!CheckLine(a, b))
{
ErrorThrow("They are the same point.");
return;
}
equation(a, b);
}
Line(const Line& nl) :Line{ nl.ptA, nl.ptB }
{
}
Line(T xA, T yA, T xB, T yB) :Line({ xA, yA }, { xB, yB })
{
}
void Init(const Point2D<T>& a, const Point2D<T>& b)
{
if (!CheckLine(a, b))
{
ErrorThrow("They are the same point.");
return;
}
ptA = a;
ptB = b;
equation(a, b);
}
void Init(T xA, T yA, T xB, T yB)
{
if (!CheckLine({ xA, yA }, { xB, yB }))
{
ErrorThrow("They are the same point.");
return;
}
ptA = { xA, yA };
ptB = { xB, yB };
equation(ptA, ptB);
}
void TransVector(Vector2D<T>& __out vec, bool isReverse/*B -> A*/ = false) const
{
if (isReverse) /*B -> A*/
vec.Init(ptA.x - ptB.x, ptA.y - ptB.y);
else /*A -> B*/
vec.Init(ptB.x - ptA.x, ptB.y - ptA.y);
}
void operator= (const Line& nl)
{
Init(nl.ptA, nl.ptB);
}
void Midperpendicular(Line<double>& __out resLine) const
{
Point2D<double> midPoint = { 0.5 * (GetPointA().x + GetPointB().x), 0.5 * (GetPointA().y + GetPointB().y) };
Vector2D<double> slope;
equation.GetSlope(slope);
Point2D<double> ptA, ptB;
if (0 == slope.x)
{
//Perpendicular to the X-axis.
ptA = { midPoint.x - 1.0, midPoint.y };
}
else
{
double k2 = -1.0 / (slope.y / slope.x);
double b2 = midPoint.y - midPoint.x * k2;
ptA = { midPoint.x + 1.0, k2 * (midPoint.x + 1.0) + b2 }; //Y = kX + b;
}
ptB = { midPoint.x, midPoint.y };
resLine.Init(ptA, ptB);
}
static bool Intersection(const Line& __in lineA, const Line& __in lineB, Point2D<double>& __out pt)
{
if (Line::IsCollinear(4, lineA.ptA, lineA.ptB, lineB.ptA, lineB.ptB) == true)
{
return false;
}
T aA, aB, aC;
T bA, bB, bC;
aA = lineA.equation.A;
aB = lineA.equation.B;
aC = lineA.equation.C;
bA = lineB.equation.A;
bB = lineB.equation.B;
bC = lineB.equation.C;
double k = static_cast<double>(aA * bB - aB * bA);
if (MyMathTools::IsEqual(k, 0.0))
{
return false;
}
pt = { (bB* -1 * aC - (-1) * bC * aB) / k, (aA * -1 * bC - (-1) * aC * bA) / k };
return true;
}
void Intersection(const Line& __in lineOther, Point2D<double>& __out pt) const
{
Line::Intersection(*this, lineOther, pt);
}
static bool IsCollinear(int ptCount, const Point2D<T>& pt1, const Point2D<T>& pt2, const Point2D<T>& pt3, ...)
{
Vector2D<T> vecAB, vecBC;
vecAB.Vector(pt1, pt2);
vecBC.Vector(pt2, pt3);
if (!MyMathTools::IsEqual(vecAB.x * 1.0 / vecBC.x, vecAB.y * 1.0 / vecBC.y))
{
return false;
}
//va_start argument must not have reference type
auto tmppt = pt3;
va_list aps;
va_start(aps, tmppt);
const Point2D<T>* pNextArg = &pt3;
bool res = true;
while (ptCount - 3 > 0)
{
const Point2D<T> ptX = va_arg(aps, const Point2D<T>);
Vector2D<T> vecAx;
vecAx.Vector(pt1, ptX);
if (!MyMathTools::IsEqual(vecAB.x * 1.0 / vecAx.x, vecAB.y * 1.0 / vecAx.y))
{
res = false;
break;
}
--ptCount;
}
va_end(aps);
return res;
}
const Point2D<T>& GetPointA() const
{
return ptA;
}
const Point2D<T>& GetPointB() const
{
return ptB;
}
private:
Point2D<T> ptA, ptB;
public:
Equation equation;
};
File: Triangle.h (暂时没用到)
#pragma once
#include "Point2D.cpp"
#include "Line.cpp"
#include "Circle.cpp"
class Triangle final
{
public:
enum class EnumPTRelation: int
{
POINT_OUTSIDE = -1,
POINT_INSIDE = 0,
POINT_ON_VERTICE = 1,
POINT_ON_LINE = 2
};
Triangle();
Triangle(const Point2D<int>& ptA, const Point2D<int>& ptB, const Point2D<int>& ptC);
~Triangle();
public:
void Init(const Point2D<int>& ptA, const Point2D<int>& ptB, const Point2D<int>& ptC);
//RelationPT: The Relation of Point and Triangle.
EnumPTRelation RelationPT(const Point2D<int>& pt) const;
void Circumcircle(Circle<double, double>& __out circle) const;
double Area() const;
void GetVertices(std::array<Point2D<int>, 3>& __out vs) const;
void GetLines(std::array<Line<int>, 3>& __out ls) const;
private:
std::array<Point2D<int>, 3> m_vertices /*m_vertex*/;
std::array<Line<int>, 3> m_lines;
};
File: Triangle.cpp (暂时没用到)
#include "Triangle.h"
Triangle::Triangle() :Triangle({ 0, 0 }, { 0, 3 }, { 4, 0 })
{
}
Triangle::Triangle(const Point2D<int>& ptA, const Point2D<int>& ptB, const Point2D<int>& ptC)
{
Init(ptA, ptB, ptC);
}
Triangle::~Triangle()
{
}
void Triangle::Circumcircle(Circle<double, double>& __out circle) const
{
const Point2D<int> ptA = m_vertices[0];
const Point2D<int> ptB = m_vertices[1];
const Point2D<int> ptC = m_vertices[2];
double A1, B1, C1, A2, B2, C2;
A1 = 2.0 * (ptB.x - ptA.x);
B1 = 2.0 * (ptB.y - ptA.y);
C1 = ptB.x * ptB.x + ptB.y * ptB.y - ptA.x * ptA.x - ptA.y *ptA.y;
A2 = 2.0 * (ptC.x - ptB.x);
B2 = 2.0 * (ptC.y - ptB.y);
C2 = ptC.x * ptC.x + ptC.y * ptC.y - ptB.x * ptB.x - ptB.y * ptB.y;
circle.center.x = ((C1*B2) - (C2*B1)) / ((A1*B2) - (A2*B1));
circle.center.y = ((A1*C2) - (A2*C1)) / ((A1*B2) - (A2*B1));
circle.radius = std::pow((ptA.x - circle.center.x)*(ptA.x - circle.center.x) + (ptA.y - circle.center.y)*(ptA.y - circle.center.y), 0.5);
}
double Triangle::Area() const
{
Vector2D<int> vecBA, vecBC;
m_lines[0].TransVector(vecBA, true);
m_lines[1].TransVector(vecBC);
return 0.5 * Vector2D<int>::Cross(vecBA, vecBC);
}
void Triangle::GetVertices(std::array<Point2D<int>, 3>& vs) const
{
vs = m_vertices;
}
void Triangle::GetLines(std::array<Line<int>, 3>& ls) const
{
ls = m_lines;
}
void Triangle::Init(const Point2D<int>& ptA, const Point2D<int>& ptB, const Point2D<int>& ptC)
{
if (Line<int>::IsCollinear(3, ptA, ptB, ptC))
{
ErrorThrow("It is Collinear.");
return;
}
m_vertices[0] = ptA;
m_vertices[1] = ptB;
m_vertices[2] = ptC;
m_lines[0].Init(ptA, ptB);
m_lines[1].Init(ptB, ptC);
m_lines[2].Init(ptC, ptA);
}
Triangle::EnumPTRelation Triangle::RelationPT(const Point2D<int>& pt) const
{
Vector2D<int> vecPA, vecPB, vecPC;
int64_t v1, v2, v3;
vecPA.Vector(pt, m_vertices[0]);
vecPB.Vector(pt, m_vertices[1]);
vecPC.Vector(pt, m_vertices[2]);
v1 = vecPA.Cross(vecPB);
v2 = vecPB.Cross(vecPC);
v3 = vecPC.Cross(vecPA);
if (v1 * v2 * v3 == 0)
{
return EnumPTRelation::POINT_ON_VERTICE; //The point and vertex coincidence.
}
//type long long, Do not use 'int'.
int64_t relationR12 = v1 * v2;
int64_t relationR13 = v1 * v3;
if (relationR12 == 0 || relationR13 == 0)
{
return EnumPTRelation::POINT_ON_LINE; //The Point on the line.
}
if (relationR12 > 0 && relationR13 > 0)
{
return EnumPTRelation::POINT_INSIDE; //The points inside triangle.
}
return EnumPTRelation::POINT_OUTSIDE;
}
File: Circle.cpp (暂时没用到)
#pragma once
#include "Point2D.cpp"
template<typename TC, typename TR>
class Circle final
{
public:
Circle() :Circle({ 0,0 }, 1)
{
}
Circle(const Point2D<TC>& centerPt, TR radius) :
center(centerPt),
radius(radius)
{
}
double Area()
{
return PI * radius * radius;
}
double Perimeter()
{
return 2 * PI * radius;
}
template<typename TP>
bool IsPointInCircle(const Point2D<TP>& pt)
{
return !MyMathTools::LessThan(radius, Point2D<TP>::Distance(center, pt));
}
public:
TR radius;
Point2D<TC> center;
};
File: ObjectSign.h (命名不太好)
#pragma once
#include <unordered_map>
#include <set>
#include <functional>
#include "stdinc.h"
template <typename T>
class ONode
{
public:
unsigned int _index;
T _node;
private:
public:
ONode()
{
}
ONode(unsigned int index, const T& node)
{
Init(index, node);
}
ONode(const ONode<T>& other) :
ONode(other._index, other._node)
{
}
~ONode()
{
}
public:
void Init(unsigned int index, const T& node) noexcept
{
if (static_cast<int>(index) > (INT_MAX >> 1))
{
ErrorThrow("The Index Is Too Large.");
return;
}
_index = index;
_node = node;
}
static ONode<T>* Alloc(unsigned int index, const T& node) noexcept
{
ONode<T>* ret;
ret = new (std::nothrow) ONode<T>(index, node);
return ret;
}
static void Free(ONode<T>*& p)
{
if (nullptr != p)
{
delete p;
p = nullptr;
}
}
};
template <typename T>
class ObjectSign
{
public:
ObjectSign()
{
Init();
}
ObjectSign(const ObjectSign& other)
{
Init(other);
}
~ObjectSign()
{
//Clear();
}
ObjectSign<T>& operator=(const ObjectSign& other)
{
this->Init(other);
return *this;
}
public:
bool IsExist(unsigned index) const
{
return !(_relation.end() == _relation.find(index));
}
int Add(const T& ele)
{
const ONode<T> node(++_max, ele);
return (Add(node)) ? _max : -1;
}
bool Add(const ONode<T>& node)
{
if (IsExist(node._index))
return false;
ONode<T>* pNewNode = ONode<T>::Alloc(node._index, node._node);
if (pNewNode == nullptr)
{
return false;
}
_max = (_max < node._index) ? node._index : _max;
if (!_lackIndex.empty())
{
std::set<size_t>::iterator lackIt = _lackIndex.begin();
size_t index = *lackIt;
_elements[index] = pNewNode;
_relation.insert(std::make_pair(node._index, index));
_lackIndex.erase(lackIt);
return true;
}
_elements.push_back(pNewNode);
_relation.insert(std::make_pair(node._index, _elements.size() - 1));
return true;
}
bool Del(unsigned int index)
{
std::unordered_map<unsigned int, size_t>::iterator itRa = _relation.find(index);
if (itRa == _relation.end())
{
return false;
}
size_t n = itRa->second;
if (_elements[n]->_index != index)
{
ErrorThrow("Del Function Error! The Index Not Match.");
return false;
}
_relation.erase(itRa);
ONode<T>::Free(_elements[n]);
_lackIndex.insert(n);
return true;
}
bool Change(unsigned int index, const T& node)
{
std::unordered_map<unsigned int, size_t>::iterator itRa = _relation.find(index);
if (itRa == _relation.end())
{
return false;
}
_elements[itRa->second]->_node = node;
return true;
}
bool Get(unsigned int index, T& __out res) const
{
std::unordered_map<unsigned int, size_t>::const_iterator itRa = _relation.find(index);
if (itRa == _relation.end())
{
return false;
}
res = _elements[itRa->second]->_node;
return true;
}
const T& Get(unsigned int index) const
{
static T res;
if (false == Get(index, res))
{
ErrorThrow("Not Found The Index.");
}
return res;
}
//Get element by index.
T& operator[](unsigned int index)
{
if (!IsExist(index))
{
T tmp;
ONode<T>* pNewNode = ONode<T>::Alloc(index, tmp);
Add(*pNewNode);
}
return this->_elements[_relation[index]]->_node;
}
const T& operator[](unsigned int index) const
{
return Get(index);
}
//Get element by sequence.
T& operator()(unsigned int sequence)
{
return GetBySequence(sequence)->_node;
}
const T& operator()(unsigned int sequence) const
{
ObjectSign* cthis = const_cast<ObjectSign*>(this);
return cthis->GetBySequence(sequence)->_node;
}
const ONode<T>*const GetBySequence(unsigned int sequence) const
{
ObjectSign* cthis = const_cast<ObjectSign*>(this);
return cthis->GetBySequence(sequence);
}
ONode<T>* GetBySequence(unsigned int sequence)
{
if (sequence >= _relation.size())
{
ErrorThrow("The sequence too large.");
return nullptr;
}
if (_lackIndex.empty())
{
return _elements[sequence];
}
else
{
int lackCount = 0;
for (std::set<size_t>::iterator it = _lackIndex.lower_bound(sequence); it != _lackIndex.begin(); --it)
{
lackCount++;
}
if (&*(_lackIndex.begin()) == nullptr)
{
lackCount += 1;
}
for (int i = sequence + lackCount; i < _elements.size(); i++)
{
ONode<T>* each = _elements[i];
if (each == nullptr)
{
continue;
}
return _elements[i];
}
ErrorThrow("The element is not found. sequence is " + std::to_string(sequence) + "; Size is " + std::to_string(_relation.size()) + " .");
return nullptr;
}
}
void Clear()
{
if (_relation.empty())
{
return;
}
std::unordered_map<unsigned int, size_t>::iterator it = _relation.begin();
for (; it != _relation.end(); it++)
{
ONode<T>::Free(_elements[it->second]);
}
_elements.clear();
_relation.clear();
_lackIndex.clear();
}
size_t Size() const
{
return _relation.size();
}
void Sort(
const std::function<bool(const ONode<T>* A, const ONode<T>* B)>& SortRuleFunc)
{
std::vector<ONode<T>*> sortRes;
sortRes.reserve(_elements.size());
_lackIndex.clear();
_relation.clear();
for (auto it : _elements)
{
ONode<T>* pEach = &*it;
if (pEach == nullptr)
{
continue;
}
sortRes.push_back(pEach);
}
std::sort(sortRes.begin(), sortRes.end(), SortRuleFunc);
_elements.clear();
_elements = sortRes;
size_t idx = 0;
for (auto it : _elements)
{
ONode<T>* pEach = &*it;
_relation.insert(std::make_pair(pEach->_index, idx));
++idx;
}
}
private:
void Init(int size = 0, bool isStrict = true)
{
Clear();
_max = 0;
_isStrict = isStrict;
if (size <= 0)
{
return;
}
_elements.resize(size);
for (int i = 0; i < size; ++i)
{
_lackIndex.insert(i);
}
}
void Init(const ObjectSign& other)
{
this->Clear();
this->_elements.assign(other._elements.begin(), other._elements.end());
this->_lackIndex.insert(other._lackIndex.begin(), other._lackIndex.end());
this->_relation.insert(other._relation.begin(), other._relation.end());
this->_max = other._max;
this->_isStrict = other._isStrict;
}
private:
std::vector<ONode<T>*> _elements;
std::unordered_map<unsigned int, size_t> _relation;
std::set<size_t> _lackIndex;
unsigned int _max;
bool _isStrict; //TODO:
};
执行结果:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号