个人项目作业
软工个人项目
| 项目 | 内容 |
|---|---|
| 所属课设:北航2020年春软件工程 | 班级博客 |
| 作业要求:实现一个能求解简单几何形状之间交点的控制台程序。 | 作业要求 |
| 个人课程目标 | 学习一个具备一定规模的软件在生命周期中需要哪些工作,锻炼自己的团队协作能力,并使自己具有开发一个“好软件”的能力 |
| 教学班级 | 006 |
| 这个作业在哪个具体方面帮助我实现目标 | 提升个人的软件工程能力 |
| 项目地址 | https://github.com/NSun-S/SoftwareEngineering_PersonalWork |
PSP估算
在开始实现程序之前,在下述 PSP 表格记录下你估计将在程序的各个模块的开发上耗费的时间。(0.5')
在你实现完程序之后,在下述 PSP 表格记录下你在程序的各个模块上实际花费的时间。(0.5')
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | 20 | 10 |
| Estimate | 估计这个任务需要多少时间 | 20 | 10 |
| Development | 开发 | 630 | 510 |
| Analysis | 需求分析 (包括学习新技术) | 60 | 30 |
| Design Spec | 生成设计文档 | 40 | 30 |
| Design Review | 设计复审 (和同事审核设计文档) | 0 | 0 |
| Coding Standard | 代码规范 (为目前的开发制定合适的规范) | 20 | 20 |
| Design | 具体设计 | 60 | 80 |
| Coding | 具体编码 | 120 | 150 |
| Code Review | 代码复审 | 30 | 20 |
| Test | 测试(自我测试,修改代码,提交修改) | 60 | 80 |
| Reporting | 报告 | 60 | 50 |
| Test Report | 测试报告 | 20 | 20 |
| Size Measurement | 计算工作量 | 10 | 10 |
| Postmortem & Process Improvement Plan | 事后总结, 并提出过程改进计划 | 30 | 20 |
| 合计 | 650 | 520 |
在任务完成后回顾这个表格,我发现我做得还算不错,总体时间小于预估,但是debug的时间较长,这也是测试花费大量时间的原因。
思路及设计
在拿到题目之后,我很快定位出这是一道代数几何题,我们需要用自己学过的平面图形的相关知识来求解问题,这个问题分为3部分:直线和直线的交点,圆和圆的交点以及圆和直线的交点。
因此,我先是在纸上进行了演算,直线和直线的交点很好推理,圆和圆的可以转换圆和直线的交点,那么我们求解的关键就是圆和直线的交点,因此我查阅了求解这个问题的相关资料,找到了解决办法。
设计实现过程
这部分完成的比较轻松,因为有面向对象的基本知识,所以在这到题中,我自然的设计了两个类,圆和直线。

上图是直线类的定义,我们可以看出,其中包含了确定直线的两个点的坐标,以及一个用来求解直线和直线交点的函数。
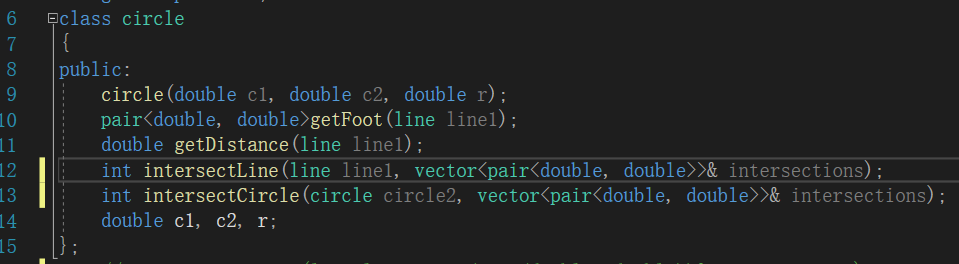
上图是圆类的定义,其中包含圆的中心点和半径,此外,还有计算垂足,计算直线到圆的距离以及求解圆和直线交点以及圆和圆交点的函数,单元测试中我主要测试了各种类型的直线之间交点的例子。
改进程序性能
这个过程经历了两个阶段:
-
使用set存放pair作为数据结构,利用set的不重复性来求解。
-
使用vector存放pair作为数据结构,最后对vector进行去重。


上面两张图是我们阶段1分别用随机生成的1000条直线(约50w交点)和3000条直线(约450w交点)测试cpu的截图,从中我们可以看出,随着交点个数以近$n^2$的比例增长,时间也大幅度的增长。
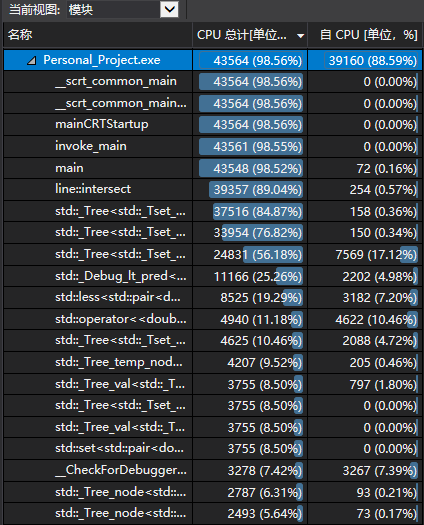
上图是3000条指令是对应的时间消耗占比,我们可看出,对set的操作花费了大量的时间。以下是其中消耗时间最长的函数:
bool line::intersect(line line2, set<pair<double, double>>& intersections)
{
double x3 = line2.x1;
double x4 = line2.x2;
double y3 = line2.y1;
double y4 = line2.y2;
double Determinant = (y1 - y2) * (x3 - x4) - (y3 - y4) * (x1 - x2);
if (fabs(Determinant) < 1e-6) return false;
double intersect_x = (-(x1 - x2) * (y3 * x4 - x3 * y4) + (x3 - x4) * (y1 * x2 - x1 * y2)) / Determinant;
double intersect_y = (-(y1 - y2) * (y3 * x4 - x3 * y4) + (y3 - y4) * (y1 * x2 - x1 * y2)) / Determinant;
intersections.insert(make_pair(intersect_x, intersect_y));
return true;
}

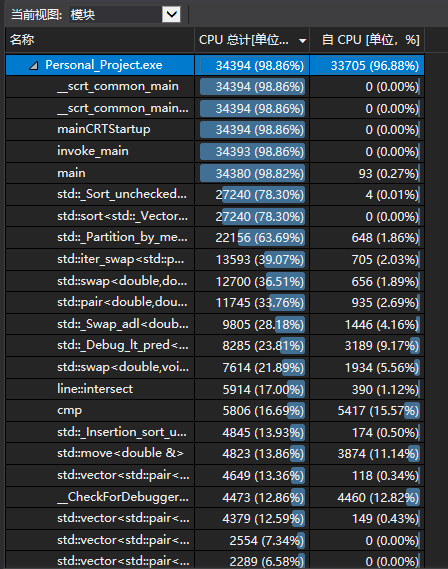
第二个阶段我们改用vector之后,用相同3000条数据测试的效果图见上图,从中可以看出,我们的cpu时间不仅获得了仅10s的缩减,瓶颈部分也发生了转变。
项目关键代码
求解直线和直线交点
bool line::intersect(line line2, vector<pair<double, double>>& intersections)
{
double x3 = line2.x1;
double x4 = line2.x2;
double y3 = line2.y1;
double y4 = line2.y2;
double Determinant = (y1 - y2) * (x3 - x4) - (y3 - y4) * (x1 - x2);
if (fabs(Determinant) < 1e-6) return false;
double intersect_x = (-(x1 - x2) * (y3 * x4 - x3 * y4) + (x3 - x4) * (y1 * x2 - x1 * y2)) / Determinant;
double intersect_y = (-(y1 - y2) * (y3 * x4 - x3 * y4) + (y3 - y4) * (y1 * x2 - x1 * y2)) / Determinant;
intersections.push_back(make_pair(intersect_x, intersect_y));
return true;
}
这个函数就是我们上一小节中改进后的瓶颈函数,但也是我们程序中最核心的部分。我先是在纸上对两个点确立的直线方程进行了推导,其实就是将两个形如$y = kx + b$的方程联立,直接得到上述代码中的结果。
求解圆和直线的交点
int circle::intersectLine(line line1, vector<pair<double, double>>& intersections)
{
double distance = getDistance(line1);
if (distance > r)
{
//cout << "???" << endl;
return 0;
}
pair<double, double> foot = getFoot(line1);
if (distance == r)
{
intersections.push_back(foot);
return 1;
}
double length = sqrt(r*r - distance*distance);
if (line1.x1 == line1.x2)
{
intersections.push_back(make_pair(foot.first, foot.second + length));
intersections.push_back(make_pair(foot.first, foot.second - length));
}
else
{
double cof = (line1.y1 - line1.y2) / (line1.x1 - line1.x2);
double x = 1 / sqrt(cof * cof + 1);
double y = cof / sqrt(cof * cof + 1);
intersections.push_back(make_pair(foot.first + x * length, foot.second + y * length));
intersections.push_back(make_pair(foot.first - x * length, foot.second - y * length));
}
return 2;
}
可以看出,我们先是进行了直线和圆心距离的计算,然后根据计算的结果决定两者之间的关系。其中对一种较为特殊的情况进行了讨论,即直线与y轴平行,这种情况下直线的斜率不存在,无法根据斜率进行计算。
圆与圆求交点
int circle::intersectCircle(circle circle2, vector<pair<double, double>>& intersections)
{
double distance = sqrt(circle2.r * circle2.r - r * r);
if (distance > (r + circle2.r) || distance < fabs(r - circle2.r)) return 0;
double right = circle2.r * circle2.r - r * r + c1 * c1 - circle2.c1 * circle2.c1
+ c2 * c2 - circle2.c2 * circle2.c2;
if (circle2.c1 == c1)
{
double y = -right / (2 * circle2.c2 - 2 * c2);
line line1 = line(1, y, -1, y);
return intersectLine(line1, intersections);
}
else if(circle2.c2 == c2)
{
double x = -right / (2 * circle2.c1 - 2 * c1);
line line1 = line(x, 1, x, -1);
return intersectLine(line1, intersections);
}
else
{
line line1 = line(0, -right/(2 * circle2.c2 - 2 * c2), -right / (2 * circle2.c1 - 2 * c1), 0);
return intersectLine(line1, intersections);
}
}
这个函数中我们先对圆之间的关系进行了判断,相离和内含的情况去掉后,只保留有交点的情况,我们知道圆和圆的方程直接做差就是交点连线的方程,我特判了其中的两种情况,圆心连线平行和垂直于y轴的情况。然后我们利用推导出来的公式从连线上取两个特殊的点,就确定了这条直线,然后求解已知圆和直线的交点方程即可。
单元测试和警告消除
- 单元测试结果图
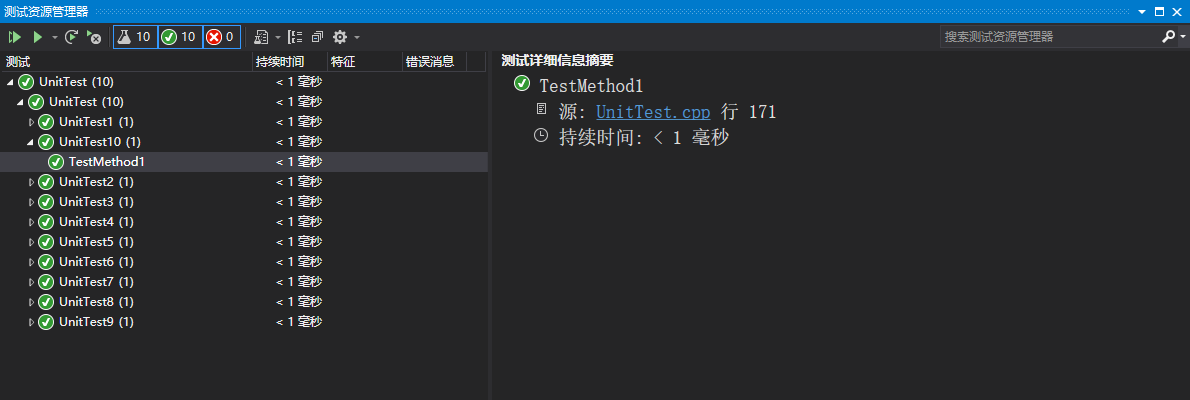
这部分我主要对直线间交点的正确性进行了测量,10个测试样例覆盖了直线相交的各种情况,一条直线、两条平行线、两条相交线、三条平行线、三条直线一个交点、三条直线两个交点、三条直线两两相交、四条直线五个交点、四条直线六个交点等多种多样直线间可能的相互关系进行了测试,一小见大,通过保证各种数量较少的直线的正确性来保证程序能正确处理多条直线间的情况。
不足之处在于圆圆之间、圆和直线之间的测试并未通过单元测试进行。
- 编译运行结果图


