
OpenCV亚像素角点cornerSubPixel()源代码分析
上一篇博客中讲到了goodFeatureToTrack()这个API函数能够获取图像中的强角点。但是获取的角点坐标是整数,但是通常情况下,角点的真实位置并不一定在整数像素位置,因此为了获取更为精确的角点位置坐标,需要角点坐标达到亚像素(subPixel)精度。
1. 求取亚像素精度的原理
找到一篇讲述原理非常清楚的文档

2. OpenCV源代码分析
OpenCV中有cornerSubPixel()这个API函数用来针对初始的整数角点坐标进行亚像素精度的优化,该函数原型如下:
void cv::cornerSubPix( InputArray _image, InputOutputArray _corners, Size win, Size zeroZone, TermCriteria criteria )
_image为输入的单通道图像;_corners为提取的初始整数角点(比如用goodFeatureToTrack提取的强角点);win为求取亚像素角点的窗口大小,比如设置Size(11,11),需要注意的是11为半径,则窗口大小为23x23;zeroZone是设置的“零区域”,在搜索窗口内,设置的“零区域”内的值不会被累加,权重值为0。如果设置为Size(-1,-1),则表示没有这样的区域;critteria是条件阈值,包括迭代次数阈值和误差精度阈值,一旦其中一项条件满足设置的阈值,则停止迭代,获得亚像素角点。
这个API通过下面示例的语句进行调用:
cv::cornerSubPix(grayImg, pts, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
首先看criteria包含的两个条件阈值在代码中是怎么设置的。如下所示,最大迭代次数为100次,误差精度为eps*eps,也就是0.1*0.1。
const int MAX_ITERS = 100; int win_w = win.width * 2 + 1, win_h = win.height * 2 + 1; int i, j, k; int max_iters = (criteria.type & CV_TERMCRIT_ITER) ? MIN(MAX(criteria.maxCount, 1), MAX_ITERS) : MAX_ITERS; double eps = (criteria.type & CV_TERMCRIT_EPS) ? MAX(criteria.epsilon, 0.) : 0; eps *= eps; // use square of error in comparsion operations
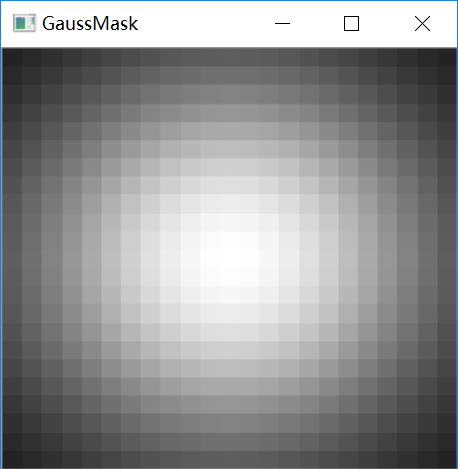
然后是高斯权重的计算,如下所示,窗口中心附近权重高,越往窗口边界权重越小。如果设置的有“零区域”,则权重值设置为0。计算出的权重分布如下图:
Mat maskm(win_h, win_w, CV_32F), subpix_buf(win_h+2, win_w+2, CV_32F); float* mask = maskm.ptr<float>(); for( i = 0; i < win_h; i++ ) { float y = (float)(i - win.height)/win.height; float vy = std::exp(-y*y); for( j = 0; j < win_w; j++ ) { float x = (float)(j - win.width)/win.width; mask[i * win_w + j] = (float)(vy*std::exp(-x*x)); } } // make zero_zone if( zeroZone.width >= 0 && zeroZone.height >= 0 && zeroZone.width * 2 + 1 < win_w && zeroZone.height * 2 + 1 < win_h ) { for( i = win.height - zeroZone.height; i <= win.height + zeroZone.height; i++ ) { for( j = win.width - zeroZone.width; j <= win.width + zeroZone.width; j++ ) { mask[i * win_w + j] = 0; } } }
接下来就是针对每个初始角点,按照上述公式,逐个进行迭代求取亚像素角点,代码如下。
① 代码中CI2为本次迭代获取的亚像素角点位置,CI为上次迭代获取的亚像素角点位置,CT是初始的整数角点位置。
② 每次迭代结束计算CI与CI2之间的欧式距离err,如果两者之间的欧式距离err小于设定的阈值,或者迭代次数达到设定的阈值,则停止迭代。
③停止迭代后,需要再次判断最终的亚像素角点位置和初始整数角点之间的差异,如果差值大于设定窗口尺寸的一半,则说明最小二乘计算中收敛性不好,丢弃计算得到的亚像素角点,仍然使用初始的整数角点。
// do optimization loop for all the points for( int pt_i = 0; pt_i < count; pt_i++ ) { Point2f cT = corners[pt_i], cI = cT; int iter = 0; double err = 0; do { Point2f cI2; double a = 0, b = 0, c = 0, bb1 = 0, bb2 = 0; getRectSubPix(src, Size(win_w+2, win_h+2), cI, subpix_buf, subpix_buf.type()); const float* subpix = &subpix_buf.at<float>(1,1); // process gradient for( i = 0, k = 0; i < win_h; i++, subpix += win_w + 2 ) { double py = i - win.height; for( j = 0; j < win_w; j++, k++ ) { double m = mask[k]; double tgx = subpix[j+1] - subpix[j-1]; double tgy = subpix[j+win_w+2] - subpix[j-win_w-2]; double gxx = tgx * tgx * m; double gxy = tgx * tgy * m; double gyy = tgy * tgy * m; double px = j - win.width; a += gxx; b += gxy; c += gyy; bb1 += gxx * px + gxy * py; bb2 += gxy * px + gyy * py; } } double det=a*c-b*b; if( fabs( det ) <= DBL_EPSILON*DBL_EPSILON ) break; // 2x2 matrix inversion double scale=1.0/det; cI2.x = (float)(cI.x + c*scale*bb1 - b*scale*bb2); cI2.y = (float)(cI.y - b*scale*bb1 + a*scale*bb2); err = (cI2.x - cI.x) * (cI2.x - cI.x) + (cI2.y - cI.y) * (cI2.y - cI.y); cI = cI2; if( cI.x < 0 || cI.x >= src.cols || cI.y < 0 || cI.y >= src.rows ) break; } while( ++iter < max_iters && err > eps ); // if new point is too far from initial, it means poor convergence. // leave initial point as the result if( fabs( cI.x - cT.x ) > win.width || fabs( cI.y - cT.y ) > win.height ) cI = cT; corners[pt_i] = cI; }
自己参照OpenCV源代码写了一个myCornerSubPix()接口函数以便加深理解,如下,仅供参考:
//获取窗口内子图像
bool getSubImg(cv::Mat srcImg, cv::Point2f currPoint, cv::Mat &subImg) { int subH = subImg.rows; int subW = subImg.cols; int x = int(currPoint.x+0.5f); int y = int(currPoint.y+0.5f); int initx = x - subImg.cols / 2; int inity = y - subImg.rows / 2; if (initx < 0 || inity < 0 || (initx+subW)>=srcImg.cols || (inity+subH)>=srcImg.rows ) return false; cv::Rect imgROI(initx, inity, subW, subH); subImg = srcImg(imgROI).clone(); return true; }
//亚像素角点提取 void myCornerSubPix(cv::Mat srcImg, vector<cv::Point2f> &pts, cv::Size winSize, cv::Size zeroZone, cv::TermCriteria criteria) {
//搜索窗口大小 int winH = winSize.width * 2 + 1; int winW = winSize.height * 2 + 1; int winCnt = winH*winW;
//迭代阈值限制 int MAX_ITERS = 100; int max_iters = (criteria.type & CV_TERMCRIT_ITER) ? MIN(MAX(criteria.maxCount, 1), MAX_ITERS) : MAX_ITERS; double eps = (criteria.type & CV_TERMCRIT_EPS) ? MAX(criteria.epsilon, 0.) : 0; eps *= eps; // use square of error in comparsion operations //生成高斯权重 cv::Mat weightMask = cv::Mat(winH, winW, CV_32FC1); for (int i = 0; i < winH; i++) { for (int j = 0; j < winW; j++) { float wx = (float)(j - winSize.width) / winSize.width; float wy = (float)(i - winSize.height) / winSize.height; float vx = exp(-wx*wx); float vy = exp(-wy*wy); weightMask.at<float>(i, j) = (float)(vx*vy); } } //遍历所有初始角点,依次迭代 for (int k = 0; k < pts.size(); k++) { double a, b, c, bb1, bb2; cv::Mat subImg = cv::Mat::zeros(winH+2, winW+2, CV_8UC1); cv::Point2f currPoint = pts[k]; cv::Point2f iterPoint = currPoint; int iterCnt = 0; double err = 0; //迭代 do { a = b = c = bb1 = bb2 = 0; //提取以当前点为中心的窗口子图像(为了方便求sobel微分,窗口各向四个方向扩展一行(列)像素) if ( !getSubImg(srcImg, iterPoint, subImg)) break; uchar *pSubData = (uchar*)subImg.data+winW+3;
//如下计算参考上述推导公式,窗口内累加 for (int i = 0; i < winH; i ++) { for (int j = 0; j < winW; j++) {
//读取高斯权重值 double m = weightMask.at<float>(i, j);
//sobel算子求梯度 double sobelx = double(pSubData[i*(winW+2) + j + 1] - pSubData[i*(winW+2) + j - 1]); double sobely = double(pSubData[(i+1)*(winW+2) + j] - pSubData[(i - 1)*(winW+2) + j]); double gxx = sobelx*sobelx*m; double gxy = sobelx*sobely*m; double gyy = sobely*sobely*m; a += gxx; b += gxy; c += gyy; //邻域像素p的位置坐标 double px = j - winSize.width; double py = i - winSize.height; bb1 += gxx*px + gxy*py; bb2 += gxy*px + gyy*py; } } double det = a*c - b*b; if (fabs(det) <= DBL_EPSILON*DBL_EPSILON) break; //求逆矩阵 double invA = c / det; double invC = a / det; double invB = -b / det; //角点新位置 cv::Point2f newPoint; newPoint.x = (float)(iterPoint.x + invA*bb1 + invB*bb2); newPoint.y = (float)(iterPoint.y + invB*bb1 + invC*bb2); //和上一次迭代之间的误差 err = (newPoint.x - iterPoint.x)*(newPoint.x - iterPoint.x) + (newPoint.y - iterPoint.y)*(newPoint.y - iterPoint.y); //更新角点位置 iterPoint = newPoint; iterCnt++; if (iterPoint.x < 0 || iterPoint.x >= srcImg.cols || iterPoint.y < 0 || iterPoint.y >= srcImg.rows) break; } while (err > eps && iterCnt < max_iters); //判断求得的亚像素角点与初始角点之间的差异,即:最小二乘法的收敛性 if (fabs(iterPoint.x - currPoint.x) > winSize.width || fabs(iterPoint.y - currPoint.y) > winSize.height) iterPoint = currPoint; //保存算出的亚像素角点 pts[k] = iterPoint; } }
夜已深,结束。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号