
公理设计-由奇怪海战引发的软件设计思考
前几天看到了一个博客,推荐了《公理设计》一书,还有其相关的文档以及视频。简单了解了一下,增深了一些对软件设计的理解,特此也推荐给大家。
公理设计理论将设计建立在科学公理、定理和推论的基础上,由麻省理工学院教授 Nam. P. Suh 领导的研究小组于 1978 年提出,适用于各种类别的设计活动。软件设计当然也属于一类工程设计过程,下面我们就来看一下两者的关联。
奇怪的海战
首先从1862年11月13日的一场海战讲起。这场海战“标志着蒸汽动力铁甲舰新时代的到来。为了便于理解,我这里对舰船名称进行了修改,想了解的朋友可以百度 U.S.S. Monitor battles C.S.S. Virginia.
南方叛军的大大号战舰,体型庞大,非常凶悍。已经击沉了两艘联邦军舰。北方政府军则只派出小小号,一艘非常小,火力也小多的军舰。

大大号顾名思义,它船体特别的大,但是都是固定炮塔,两侧和首尾有很多门炮。而小小号虽然小,却有一个可以旋转的炮台。
我们可以理解为一条战舰需要有两个基础功能:调整航行方向和调整炮击方向。
对于大大号,这两个功能需求是耦合 couple 的,要改变炮击方向,就需要将船只转向。而对于小小号,这两个功能需求则是解耦合 decouple 的,航行方向与炮击方向无关,炮击方向可以独立调整。
于是小小号一直尽量守在大大号的射击死角攻击,而大大号虽然火力猛烈则必须不断通过改变航线来调整炮击方向,于是就不断绕圈。这两条船打了4个小时,大大号不得不撤退了,小小号获得了胜利。
由此可见功能之间的解耦十分重要,它增加了便捷性和灵活性。
工科生最爱的映射矩阵
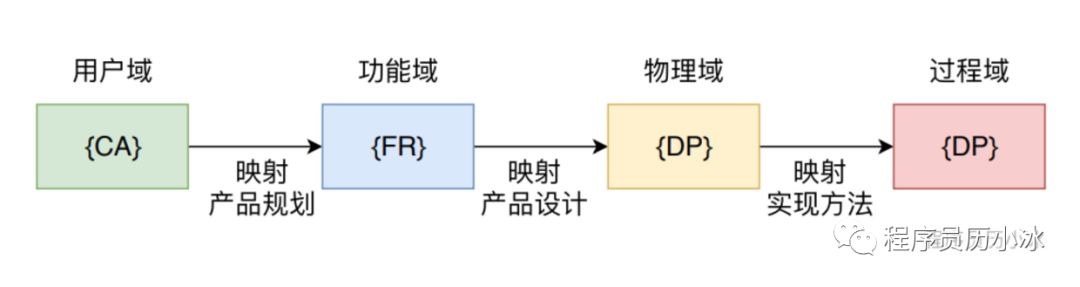
书中由海战作为引子,介绍了设计过程中的四个域(Domain):
- CNs:Customer Needs,客户域,就是客户描述的一大堆自然语言也说不清楚的事情,什么高端大气上档次之类的东西。
- FRs:Functional Requirements,功能域,从 CNs 域到 FRs 域的变换,就是把客户漫无边际的需求翻译成一些可定量的参数,比如战舰控制系统的 FR 是控制航行方向和控制开炮方向。
- DPs:Design Parameters,设计参数,或者叫物理域,实现 FRs 的物理参数,比如航向控制器和炮塔控制器。
- PVs:Process Variables,过程变量,或者叫过程域,是描述实现功能过程中涉及的过程变量。
相邻域之间的映射,可以看成目标(做什么?)和手段(怎样做?)之间的对应关系。设计过程是相邻域中特征向量之间映射和转换过程。
例如,用户域元素映射到功能域的过程,实际上是将用户需求转变成产品功能要素的过程,即产品规划;功能域向物理域的映射过程是产品的设计过程;从物理域到过程域的映射则可看成“加工产品”的过程。
其中最为重要的是FRs(功能需求)到DPs(设计参数)的映射,这也是我们软件开发过程中最长接触的步骤,需求文档有了,如何进行代码设计并实现。
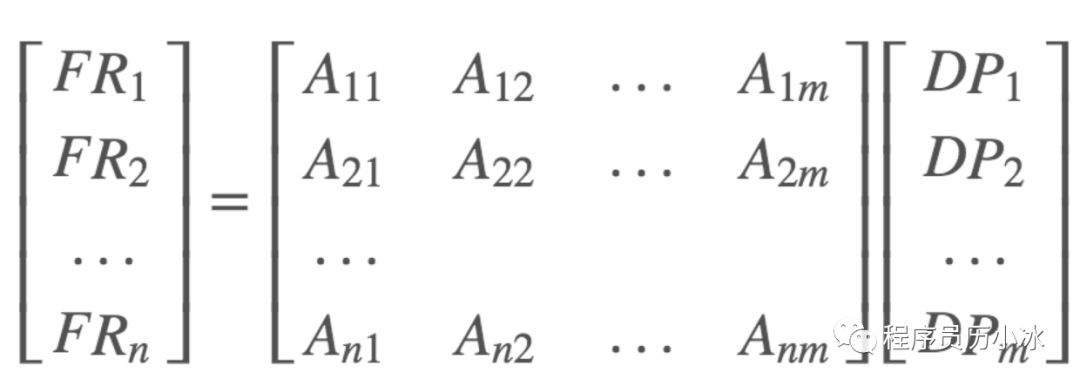
书中以矩阵向量的方式讲述了 FRs (功能需求) 和 DPs (设计参数) 的映射关系,也就是上图中由 A 变量组成的矩阵代表着 FPs 到 DPs 的映射。不同的矩阵代表着不同的映射关系,其实我们不需要关心矩阵各个位置的具体值如何计算,只需简化的了解如果 FP 和 DP 有关联,则矩阵相应位置上的值为1,否则为0。
比如说小小号上的情况,有两个功能需要:FR1(调整航向)和FR2(调整开炮方向);以及两个设计参数:DP1(船舵)和DP2(旋转炮塔)
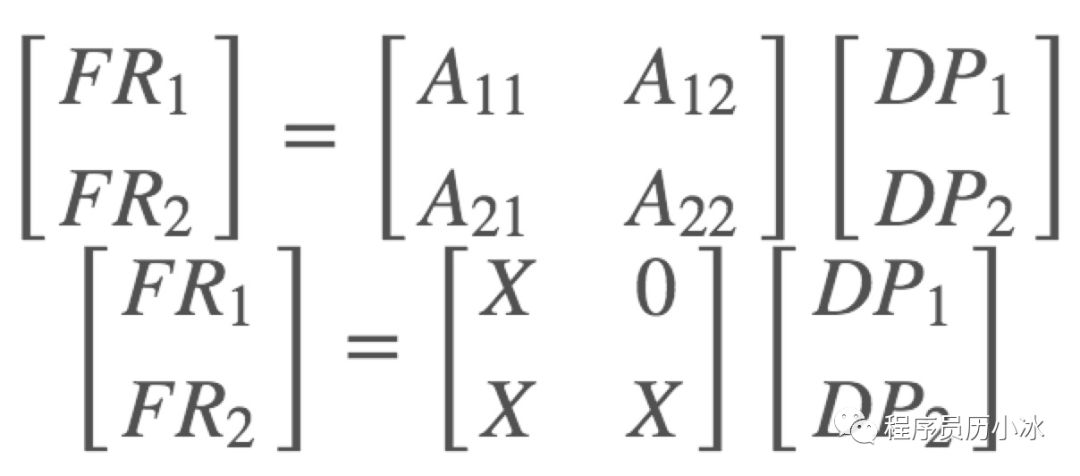
其中转动船舵的时候,船会转向,所以A11这里是X,同时船身上的炮塔也跟着船一起转向,所以也影响开炮方向FR2,因此A21也是X。 而在旋转炮塔的时候,不影响船的航行方向,所以A12这里是0。
好的设计?
所以,基于上边这个映射矩阵,好的设计应该有两个特点:
- 首先FRs(功能需求)的数量N,应当等于DPs (设计参数)的数量M。
- 每一个FR(功能需求)与且只与一个DP(设计参数)相互关联。
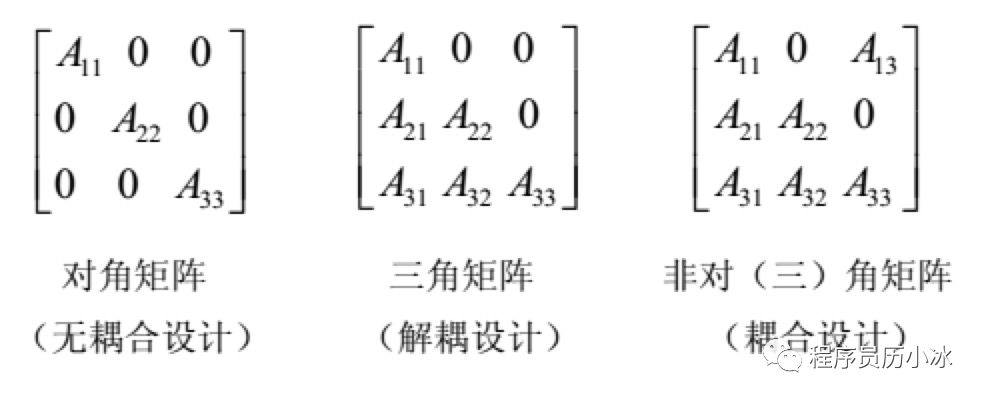
也就是说映射矩阵是一个对角矩阵,对角线上有值,其他位置都是0。《程序员修炼之道》中也提及了类似的思想,也就是正交性一节。那一节的提示是消除无关事务之间的影响,正好和这里映射矩阵是对角矩阵不谋而合。当映射举证是对角矩阵时,说明 FR 和 DP 一一对应,不会有交叉影响。当某一个 FR也就是需求发生变更时,只需要修改一个DP。
当然对角矩阵属于比较理想的情况,书中也罗列了一些其他类型的映射矩阵。
其中最差的情况是 FRs(功能需求)的数量N,小于 DPs(设计参数)的数量M。也就是大大号中的情景:它有两个功能需求,FR1 调整航向
和FR2 调整开炮方向,但只有一个DP1 船舵。所以它的映射矩阵如下图所示。

书中还继续讲解了矩阵分解的知识,也就是对应了需求功能点细分到软件详细设计细分等部分的内容,有兴趣的小伙伴可以自己去看看。
总结
所以书中最后给出两个公里:
- 独立公理(功能独立性公理)
- 信息公理(信息量最少公理)
这不正是软件设计中经常提及的松耦合和高内聚嘛。模块相互独立互不影响就是松耦合,最小化信息量就是不对外暴露过多信息,也就是高内聚或者信息隐藏。


