
屈服条件8
屈服条件
2.1 应力偏张量及性质
在空间应力状态下,适当选择坐标轴,可让剪应力为零,而只剩正应力,这样相互垂直的坐标轴的方向叫应力张量的主方向,或者主轴。
与主方向垂直的面叫主平面,该面上的正应力叫主应力,三个主应力分别用 \(\sigma_1,\sigma_2,\sigma_3\)表示,则主应力\(\sigma_N\)
的值可以用行列式表示
即
求得,其中
坐标变换时,应力分量会改变,但是主应力的值不变,以为系数 $ I_1,1_2,I_3$ 和坐标轴的取向无关,他们叫应力张量的第一,二,三不变量。
如果取主轴为坐标轴,则得到应力表示的应力不变量
另外,通过主方向且与另外两个主方向成45°角的平面的剪应力称为主剪应力,分别用\(\tau_1,\tau_2,\tau_3\)
主剪应力与主应力的数值关系为
把主应力按顺序排列 \(\sigma_1\geqslant\sigma_2\geqslant\sigma_3\),则
1.应力张量的分解及应力偏量
要建立复杂应力状态下的屈服准则或判据,必须从深人分析一点的应力状态着手。根据 Bridgman 的实验,静水压力不影响屈服,对应于静水应力状态的变形是弹性的体积改变,而无形状的改变。可以设想,如将描述一点应力状态的应力张量分解成两部分,其中一部分为平均正应力,即静水压力,它与塑性变形无关;另一部分是扣除平均应力后的剩余部分,它将直接与形状改变、塑性变形相关。
记平均正应力(mean normal stress)为 \(\sigma_\mathrm{m}\),有
由应力张量的第一不变量$I_1=\sigma_x+\sigma_y+\sigma_z $可知,平均正应力也是一个不变量,现在将应力张量分解成两个部分
或者简写为
等式右边第一个张量称为应力球张量(简称球张量)
其中\(\delta_{ij}\)为Kronecker符号, 它的定义
也可以叫单位张量
等式右边第二个张量称为应力偏张量(简称应力偏量,deviatoric stress),其中\(S_{x}=\sigma_{x}-\sigma_{\mathrm{m}},S_{y}=\sigma_{y}-\sigma_{\mathrm{m}},S_{z}=\sigma_{z}-\sigma_{\mathrm{m}},S_{xy}=\tau_{xy},S_{zx}=\tau_{zx},S_{yz}=\tau_{yz}\)。应力球张量对应于均匀应力状态,它只引起弹性体积改变,而无形状改变。应力偏张量反映了一个实际的应力状态偏离均匀应力状态的程度,它所代表的应力状态将只产生材料的形状改变,而无体积改变。正是由于应力偏量显示出与形状改变有关的塑性变形的部分,因而,在塑性力学中,应力偏量概念有重要意义。
2.应力偏张量的性质
(1)主方向和不变量(invariant) 应力偏张量也是一种应力状态,它代表一特殊应力状态,因而也有主方向和不变量,可以看出,\(S_{ij}\)与\(\sigma_{ij}\)有相同的主方向,其不变量可表示为
若以 \(S_1,S_2,S_3\)表示主应力偏量,则有
在塑性力学中,应力偏张量的第二不变量\(J_2\)是一个非常重要的量。$J_2 \(还可用\) \sigma_{ij}$表示为
(2) $J_2 $ 的一个不等式,\(1\leqslant\frac{2 \sqrt{J_{2}}}{\sigma_{1}-\sigma_{3}}\leqslant\frac{2}{\sqrt{3}}\approx1.5\)
-
几个和\(J_2\)有关的量
等斜面(八面体面)上的正应力\(\sigma_8\) 和剪应力 \(\tau_8\)
选取坐标轴\(x,y,z\)与被考察点的三个应力主方向重合,考虑一个法线为\(N\)的斜面,N 为单位矢量,其方向余弦为
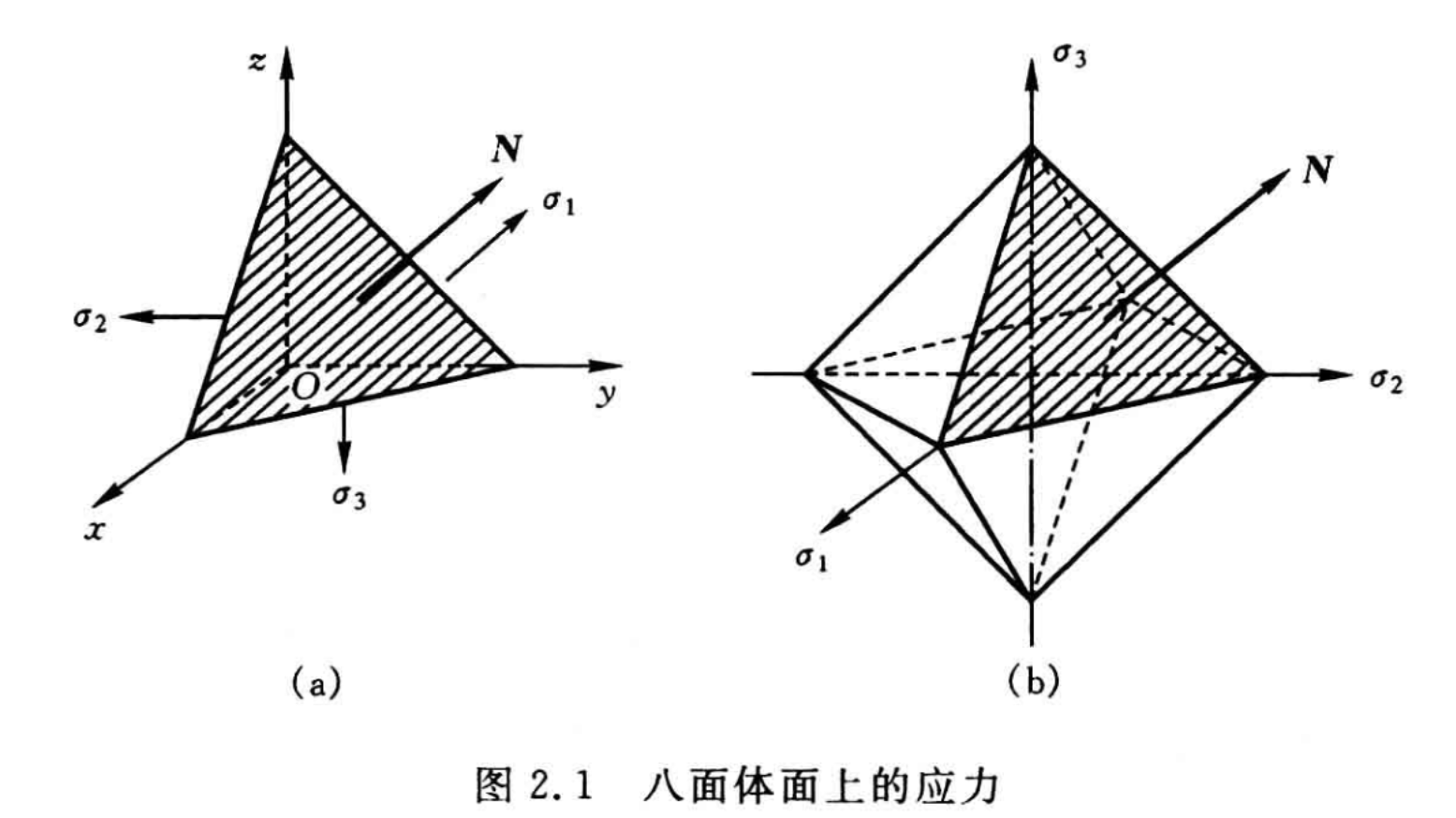
这种平面称为等斜面(图 2.1)。显然这样的面有八个(每个象限有一个),它们构成一个八面体,所以等斜面也称为八面体面。等斜面上的正应力(octahedral normal stress) \(\sigma_{8}(\)或记为 \(\sigma_{\mathrm{oct}})\)为
等斜面的总应力为
则等斜面上的剪应力(octahedral shear stress) 或记为\(\tau_{oct}\)
由此可见,等斜面上的应力可分解为两部分,其中八面体剪应力在塑性力学中很有用处。\(\tau\)。也可以用应力分量表示为
(2)应力强度(等效应力) \(\sigma_i\)为了使不同应力状态下的强度效应能相互比较,引人应力强度或等效应力的概念。单向应力状态仅由应力的大小即可反映出其强度。对复杂应力状态,其强度应由各应力分量的联合作用来表征。为此引人一个综合性的量,使它具有和单向应力相似的可比较性,即应力强度。
在塑性力学中,将应力强度定义为
或者
\(\sigma_i\) 用应力偏量表示
单向应力状态可作为复杂应力状态的特例,对于单向拉伸\(,\sigma_1\neq0,\sigma_2=\sigma_3=0\),有
\(\sigma_{i}=\sigma_{1}\)。这就是 \(\sigma_i\) 的定义式(2.1.14)中引人系数\(\frac3{\sqrt{2}}\)的来由。
等效应力还可以用\(J_2\)来表示,有
显然它也是一个不变量,与坐标的选择无关。从函数的形式可以看出,各正应力分量增加或减少一个静水应力,等效应力的值不变,即它与球张量无关,而只与应力偏张量有关。
主剪应力和剪应力强度 设\(\sigma_1\geqslant\sigma_2\geqslant\sigma_3\),可定义三个主剪应力为
则有
在纯剪应力状态下,即\(\tau_{xy}=\tau,\sigma_{x}=\sigma_{y}=\sigma_{z}=\tau_{yz}=\tau_{zx}=0\),则\(J_2=\tau^2\)。若令\(T=\sqrt{J_2}\) (纯剪时\(T=\tau\)),\(T\)称为剪应力强度,可用来表征塑性变形。它是将复杂应力状态化作一个具有相同效应的纯剪状态时的剪应力。由式(2.1.13)可得
以上介绍的\(\tau_8,\sigma_i\)及\(T\)均与应力球张量无关,它们直接与单纯的形状变化相关联,故在塑性力学中均有应用。
2.2 应力空间,π平面和Lode参数
1.主应力空间和\(\pi\)平面
一点应力状态的表示可采用六个独立的应力分量,也可以用三个主应力的大小及其相应的三个主方向,还可以用应力张量的三个不变量及应力主方向。如同在三维空间内\(x,y,z\) 的三个坐标值可确定空间一个点的位置一样,确定一点应力状态的六个独立应力分量也可在虚构的六维应力空间中表示。所谓六维应力空间,就是以六个应力分量为六个坐标轴的假想空间,该应力空间中的任一点都表示一个应力状态。考虑到材料是初始各向同性的,从建立屈服条件的目标出发,只要知道三个主应力的大小即可。于是,如将三个主应力\(\sigma_1,\sigma_2,\sigma_3\)取为三个相互垂直的直角坐标轴而构成一个空间直角坐标系(如图 2.2),则该空间中的一点\(P\)就对应于物体中某点的应力状态(\(\sigma_1,\sigma_2,\sigma_3)\),或者用矢量$\overrightarrow{OP} $表 示 该 点 的 应 力 状 态 , 称 为 应力状态矢。这个空间就称为主应力空间,它是由 Haigh-Westergaard 提出的。在载荷改变的过程中,物体内各点的应力状态在不断地变化,在应力空间中相应的应力点也在不断地改变其位置,则这些应力状态矢的矢端描出的轨迹就称为相应点的应力路径(历史),即应力空间中的一曲线表示了一点应力状态的变化过程。
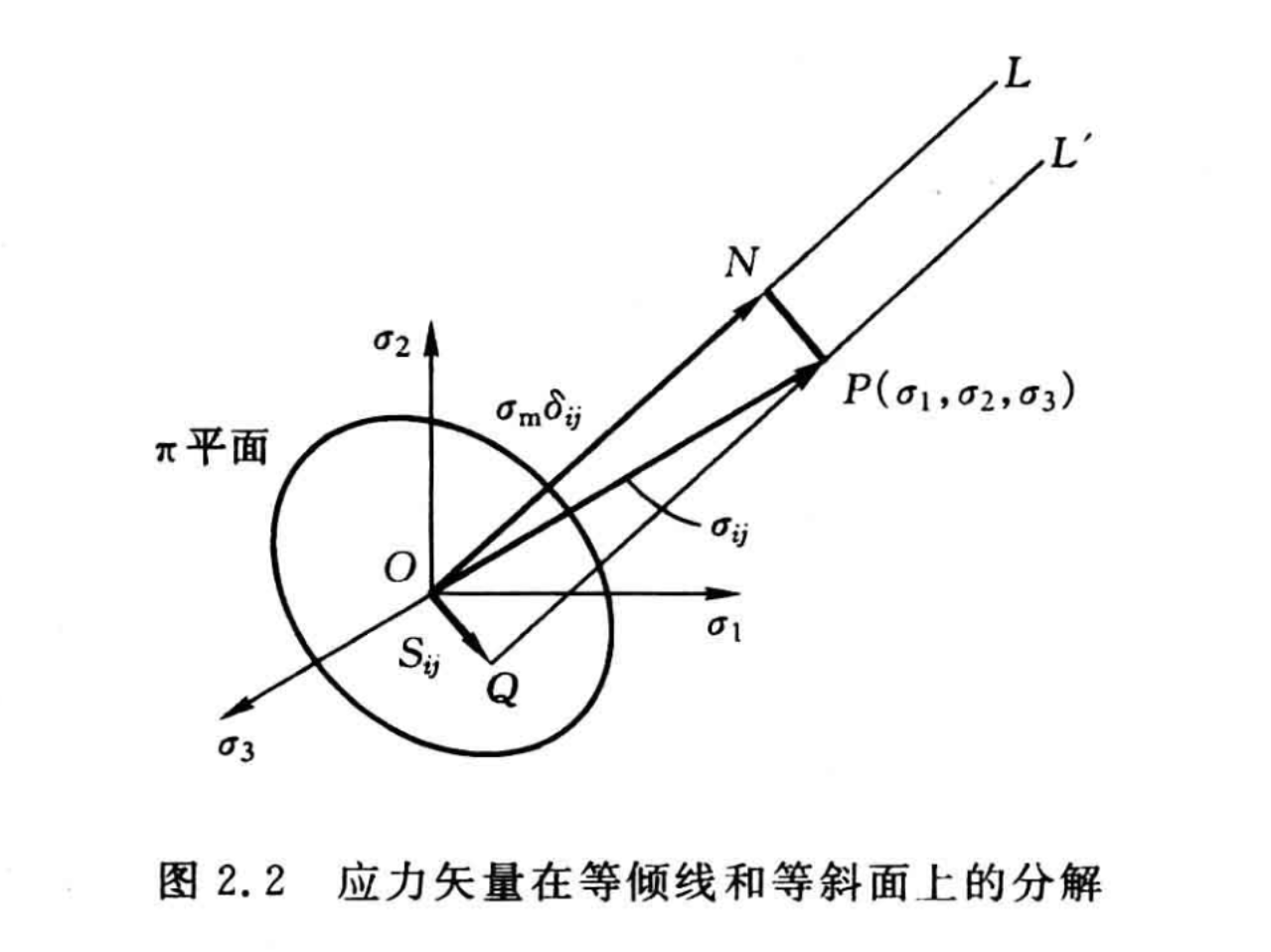
设以\(i,j,k\)表示主应力空间中三个坐标轴的单位向量。今在应力空间中做一直线\(L\),它过原点\(O\),且与三个坐标轴的夹角相等,称之为等倾线\(L\)(也有称等斜线)。由于\(L\)上任一点在三个坐标轴上的坐标是相等的,所以\(L\)直线的方程是
由于在这个平面上所有各点的平均应力为零,只有应力偏量,因此,将其称为偏量平面\(\pi\)。位于\(\pi\)平面上的点是与应力偏量相对应的。
现对矢量\(\overrightarrow {OP}\)做 如 下 分 解
式中:\(\overrightarrow {OQ}\)为应力偏量;\(\overrightarrow{ON}\)为静水应力。因\(\overrightarrow {ON}\)在三个坐标轴上的投影相等,故必与等倾线 \(L\) 重合。又由 \(S_1+S_2+S_3=0\),知\(\overrightarrow { OQ}\)必在 \(\pi\) 平面内。
注意,过\(\pi\)平面上任一点且与\(\pi\)平面相垂直做一直线\(L^\prime\),该线上各点的应力 偏量是相同的。因静水应力对材料的塑性特性没有影响,故考察塑性变形与应力状态之间的关系时,可以着眼于 \(\pi\) 平面,只考虑在该平面的投影(如\(\overrightarrow{OQ}\))即可,因为立力空间中任一点所代表的应力状态的偏量部分必落在\(\pi\)平面上。
2. 应力偏量的二维表示
塑性力学仅对应力偏量感兴趣,故在应力空间中只需研究\(\pi\)平面上各点所代表的应力状态即可。而在\(\pi\)平面上任一点的位置可用两个参数来表示,即
如何建立空间点与平面之间的关系?下面进行讨论。
将单位矢量(\(i,j,k\))向\(\pi\)平面上投影,且记为\((i^{\prime},j^{\prime},k^{\prime})\),在 \(\pi\) 上取直角坐标 Oxy,使 y轴与\(j^\prime\)重合,如图 2.3 所示。为建立主应力空间一点\((\sigma_1,\sigma_2,\sigma_3)\)与空间直角坐标一点\((x,y)\)的关系,先要求出\(i,j,k\) 在\(\pi\) 平面上投影的长度。设向量\(i\)在\(\sigma_\mathrm{l}\) 轴上的端点为 \(a\),在 \(\pi\) 平面上的投影为 \(a^{\prime}\),\(j\)在\(\sigma_2\)轴的端点为\(b\),在\(π\)平面的投影为\(b^{\prime}\),在矢量\(\overrightarrow {ab}\)的长度为
因为 \(\overrightarrow {ab}\) 与π 平行,故
则
故\(a^{\prime}\)在\(Oxy\) 系下的坐标为\(\left(x=\frac{\sqrt{2}}{2},y=-\frac{1}{\sqrt{6}}\right);\) 主应力(\(\sigma_1,0,0)\)在\(\pi\)平面投影坐标为$ (\sqrt{\frac23} \sigma_1,-\frac{1}{\sqrt{6}}\sigma_1)$,
b‘ 在\(Oxy\) 系下的坐标为 \(\left(x=0,y=-\sqrt{ \frac{2}{3}}\right)\); 故(0,\(\sigma_2,0\))在 \(\pi\) 平面投影的坐标为\(\left(0,\sqrt{\frac23}\sigma_2\right)\).
\(c^\prime\)在\(Oxy\) 系下的坐标为 \(\left (-\frac{\sqrt{2}}2,-\frac1{\sqrt{6}} \right)\), 则 $ (0,0,\sigma_3) $ 在π平面投影坐标 $ \left(-\frac{\sqrt{2}}{2}\sigma_3,-\frac{1}{\sqrt{6}}\sigma_3\right)$
因而,\((\sigma_1,0,0)+(0,\sigma_2,0)+(0,0,\sigma_3)=(\sigma_1,\sigma_2,\sigma_3)\)在\(\pi\)平面内\(Ox\)y直角坐标系下的坐标为
设偏量矢量\(\overline {OQ}\)的模为\(r_\sigma\) ,与x轴夹角为\(\theta_\sigma\) ,进而可得在 π平面内极坐标系下的坐标
\(\theta\)。称为应力罗德(Lode)角,它反映了各应力偏量之间的比例特征,\(r\)。则反映了它们之间的数量特征。上式中已经给出,一个应力状态在\(\pi\)平面上的投影等于它的应力强度乘以\(\sqrt{\frac23}\)。
其中
\(\mu_{\mathrm{o}}\)称为应力罗德参数,它反映了中间主应力与其他两个主应力的比值,和平均应力\(\sigma_\mathrm{m}\) 无关,故它是反映应力偏量特征的一个量。
若有\(\sigma_1\geqslant\sigma_2\geqslant\sigma_3\)则有
以下是集中特殊情况的\(\mu_\sigma\)值
单向拉伸状态:\(\sigma_2=\sigma_3=0,\sigma_1>0\),则 \(\mu_{\sigma}=-1\),
纯剪状态:\(\sigma_1=-\sigma_3,\sigma_2=0\),则\(\mu_{o}=0\)
单向压缩状态:\(\sigma_1=\sigma_2=0,\sigma_3<0\),则 \(\mu_{\sigma}=1\)。
从以上讨论可知,给定(\(\sigma_1,\sigma_2,\sigma_3\))可以确定(S\(_1,S_2,S_3\)),进而可确定(\(x\),y)或\((r_{o},\theta_{o})\)。反之,给出\((x,y)\)或\((r_{o},\theta_{o})\),可得\((S_1,S_{2},S_{3})\)。即,利用 $S_1+S_{2}+S_{3}=$0,容易得到
即\(\sigma_1,\sigma_2,\sigma_3)\to(S_1,S_2,S_3)\rightleftharpoons(x,y)\rightleftharpoons(r_\sigma,\theta_\sigma)\)
2.3 应力偏量和等效应变
和应力张量类似,可以将应变张量分解为如下两部分
式中:\(\varepsilon_{\mathrm{m}}=\frac{1}{3}(\varepsilon_{x}+\varepsilon_{y}+\varepsilon_{z})\)为平均应变,它只引起单元体的体积应变而不改变其形状;体积应变\(\theta=\varepsilon_x+\varepsilon_y+\varepsilon_z=3\varepsilon_{\mathrm{m}}\)。注意,这里的剪应变为工程应变的一半,即
如果令
则可简写为
式中:\(\varepsilon_\mathrm{m}\delta_{ij}\)为应变球张量;\(e_{ij}\)应变偏张量,简称应变偏量。对于\(e_ij\),存在关系式\(e_i=\)
0,即不产生体积改变,只产生形状改变。
类似地,可定义应变强度(或称等效应变)为
对于单向拉伸状态,\(\varepsilon_x=\varepsilon,\varepsilon_y=\varepsilon_x=-\nu\varepsilon,\gamma_{xy}=\gamma_{yz}=\gamma_{zz}=0\),则有 \(\varepsilon_i=\varepsilon\)。应变强度有时也称为等效应变或广义应变,其作用是将一个复杂应力状态的应变化为一个相同效应的单向应力状态的主应变\(\varepsilon_\mathrm{l}\) 。
对于塑性变形,泊松比\(\nu\)接近于0.5,故应变强度常采用如下简单形式
或者
或者用应力偏量来表示
同样地,可以定义剪应变强度(或称等效剪应变)为
不难验证,在纯剪切情况下有 \(\varepsilon_1=\varepsilon_3=\frac{1}{2}\gamma>0\),因此 \(\gamma_i=\gamma=2\sqrt{J_2}\)。
仿照前述的主应力空间的定义,也可以构造一主应变空间,即以\(\varepsilon_1,\varepsilon_2,\varepsilon_3\)为正交坐标轴建立一个三维空间。进而,可定义如下的应变罗德参数\({\mu_\epsilon}\)和应变罗德角\(\theta_\epsilon\)
其变化范围为一1\(\leqslant\mu_{\epsilon}\leqslant1\)。其中的三个特殊情况如下
(a)单向拉伸状态:\(\varepsilon_1>0,\varepsilon_2=\varepsilon_3=-\nu\varepsilon_{1}\),则\(\mu_\epsilon=-1\)。
(b)纯剪状态\(:\varepsilon_1=-\varepsilon_3>0,\varepsilon_2=0\),则\(\mu_\epsilon=0\)。
(c)单向压缩状态:\(\varepsilon_3<0,\varepsilon_1=\varepsilon_2=-\nu\varepsilon_3\),则\(\mu_\epsilon=1\)。
应力罗德参数表示了一点应力状态的特征,而应变罗德参数则表示了一点应变状态的特征。
2.4 初始屈服条件和初始屈服曲面
1.屈服条件的一般概念
物体在外力作用下最初呈弹性响应,当载荷达到一定程度时物体内应力较大处开始进入塑性状态或达到屈服。问题是应力状态满足怎样的条件时材料将达到屈服?我们将物体内一点开始达到屈服时应力所满足的关系式称为初始屈服条件,有时简称为屈服条件(yield criterion),又称为塑性条件,它在应力空间中对应的曲面称为屈服面(yield surface)。
对简单应力状态,屈服条件很容易确定。如对于单向拉伸,当拉应力\(\sigma\)达到材料屈服极限\(\sigma_\mathrm{s}\)时开始屈服,所以屈服条件可写为
对纯剪状态,当剪应力\(\tau\)达到材料剪切屈服极限\(\tau\)时开始屈服,其屈服条件为
在一般情况下,应力状态是由六个独立的应力分量确定的,显然不能简单地取某个应力分量作为判断是否开始屈服的判据,更何况这六个分量还和坐标轴的选择有关。但是,可以肯定,一般情况下,屈服条件应该和这六个应力分量有关,还和材料的性质有关,即复杂应力状态下的屈服条件可以写成下面的函数关系
现在的目标就是要确定函数\(f\)的具体形式。对于单拉或纯剪状态,\(f\)可用实验确定,但对于复杂应力状态则要采用理论分析加实验测试相结合的研究方法。
2.屈服条件的简化及屈服面的几何形状
首先来分析初始屈服面应具有的性质。
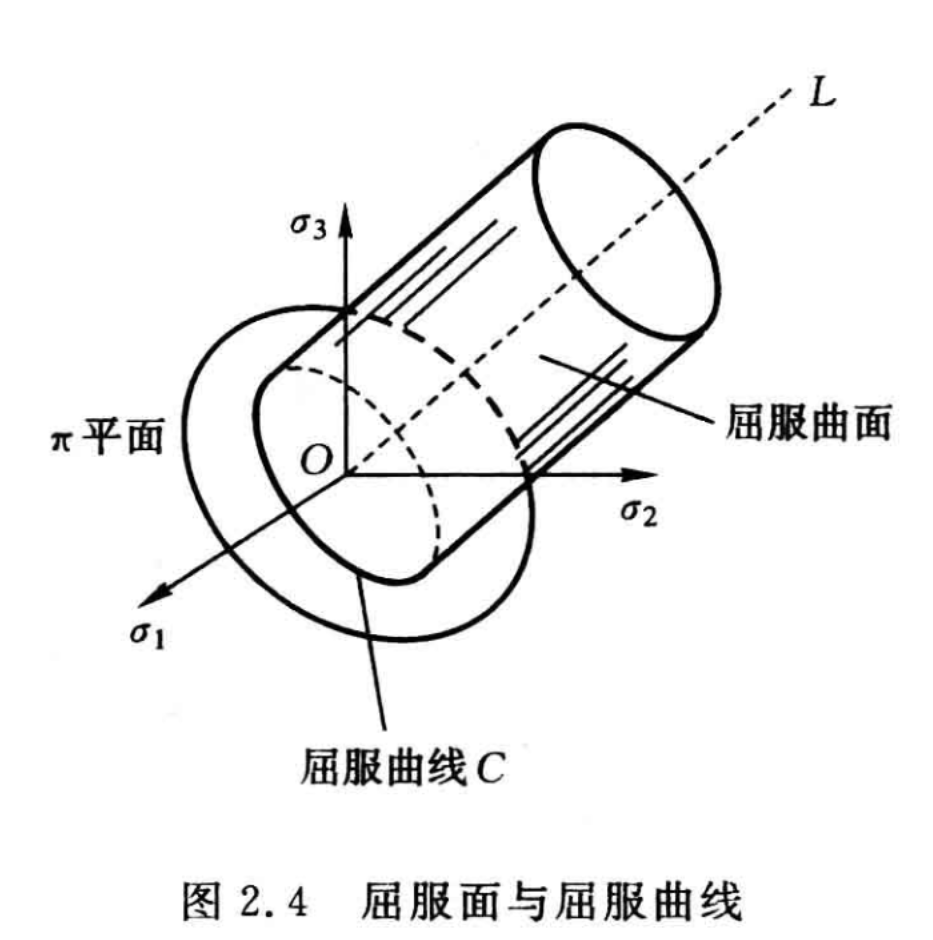
性质 1 在应力空间中,屈服面是母线平行于等倾线\(L\)的等截面柱体。
对于初始各向同性的材料,屈服和应力方向无关,故可以在主应力空间内问题。屈服函数\(f\)应该用与坐标轴的洗择无关的应力不变量来表示,因而为
考虑到静水应力(各向均匀应力状态)不影响屈服,上式还可写为
\(f(\sigma_1,\sigma_2,\sigma_3)=0\) 表示一个曲面, \(f(S_1,S_2,S_3)=0\) 表示π平面上的一曲线C,即屈服曲线。
因为总要在应力的大小达到一定数值时才会屈服,故曲线\(C\) 不会通过原点\(O\), 且\(C\)将把原点包围在内部;当应力点处于曲线内部时呈弹性状态,处于曲线\(C\)上的点进入塑性状态,故屈服曲线是\(\pi\)平面上一封闭曲线。而过屈服线上任一点与\(L\)平行的直线上的点集的应力偏量相同,故在应力空间中,屈服面是母线平行\(L\) 的等截面柱面,如图 2.4 所示。
性质 2 屈服曲线是外凸的。
由\(O\)点出发的射线与屈服曲线只能交于一点,因为材料初始屈服只能有一次,图 2.5 的情况不可能存在,即屈服曲线\(C\)对坐标原点是外凸的(证明见 3.2节)。
性质 3 屈服曲线关于\(\sigma_1^{\prime},\sigma_2^{\prime},\sigma_3^{\prime}\)对称。
由初始各向同性假设可知,若在应力状态(\(\sigma_1,\sigma_2,\sigma_3)\)下屈服,则在(\(\sigma_1,\sigma_3,\sigma_2)\)下亦屈服,但它们在\(\pi\)平面的投影(S\(_1,S_2,S_3\))及(S\(_1,S_3,S_2\))关于\(\sigma_1^{\prime}\)轴对称,故屈服曲线以\(\sigma_1^{\prime}\)轴对称。同理,也以\(\sigma_2^{\prime}\)和\(\sigma_3^{\prime}\)为对称轴(这里\(\sigma_1^{\prime},\sigma_2^{\prime},\sigma_3^{\prime}\)为\(\sigma_1,\sigma_2,\sigma_3\)在\(\pi\) 平面上的投影)。
性质4 屈服曲线以\(\sigma_1^{\prime},\sigma_2^{\prime},\sigma_3^{\prime}\)的垂线为对称轴。
假定拉、压屈服极限(初始屈服)的绝对值相等,则当(S_1,S_2,S_3)在屈服线上时,(-S_{1},-S_{2},-S_{3})也必在屈服线上。由以前的分析知,(S_{1},S_{2},S_{3})在$\pi $平面 上的坐标为(对初始状态适用)
\((-S_1,-S_2,-S_3)\)的坐标为
则与\(K\)点关于\(\sigma_\mathrm{i}^{\prime}\)对称的点\(H\)必在屈服线上。但\(H\) 和\(M\) 是关于\(\sigma_1^{\prime}\)的垂线为对称的,故\(\sigma_1^{\prime}\)的垂线是屈服曲线的对称轴。同理,\(\sigma_2^{\prime}\)和\(\sigma_3^{\prime}\)的垂线亦为对称轴。
综上,屈服曲线共有六个对称轴,由 12 段相同的弧线所组成。因此,只要能确定\(\pi\)平面上 30°范围内屈服曲线的形状,即可获得整个屈服曲线。这时采用代表应力状态的矢量\(\overrightarrow {OP}\)(图2.6)位于某一选定幅角中的应力组合就足够了。例如,决定应力力状态的矢量\(\overrightarrow {OP}\)(图 2.6)位于某一选定幅角中的应力组合就足够了。例如,决定应力矢量\(\overrightarrow {OP}\)位置的应力罗德角取为\(0\leqslant\theta_{\mathrm{o}}\leqslant\) \(30^{\circ}\),或相应的 \(\mu_{\circ}\) 从 0(纯剪切)到 1(单向压缩)的范围。由于薄壁管压缩试验较难实现(易失稳),通常采用拉伸实验以代之,也即试验是在\(一1\leqslant\mu_\sigma\leqslant0\) 的范围内进行。由此可得出 \(-30^{\circ}\leqslant\theta_\sigma\leqslant0\) 范围内的屈服曲线,从而确定了整个屈服面的具体形状。
但是,即使在 30°范围内,要完全依靠试验得出屈服曲线也是相当困难的。实际上,往往要根据有限的试验结果,对材料进人塑性状态的原因做出假设,借此建立屈服条件,然后再用实验加以验证。
3.屈服曲线的确定
当$\sigma_1\geqslant\sigma_2\geqslant\sigma_3 \(时,有\)-1\leqslant\mu_{\sigma}\leqslant1$在 $\pi $ 平面上有 $-30\circ\leqslant\theta_\sigma\leqslant30\circ $
(1) 由单拉实验知
可确定A点
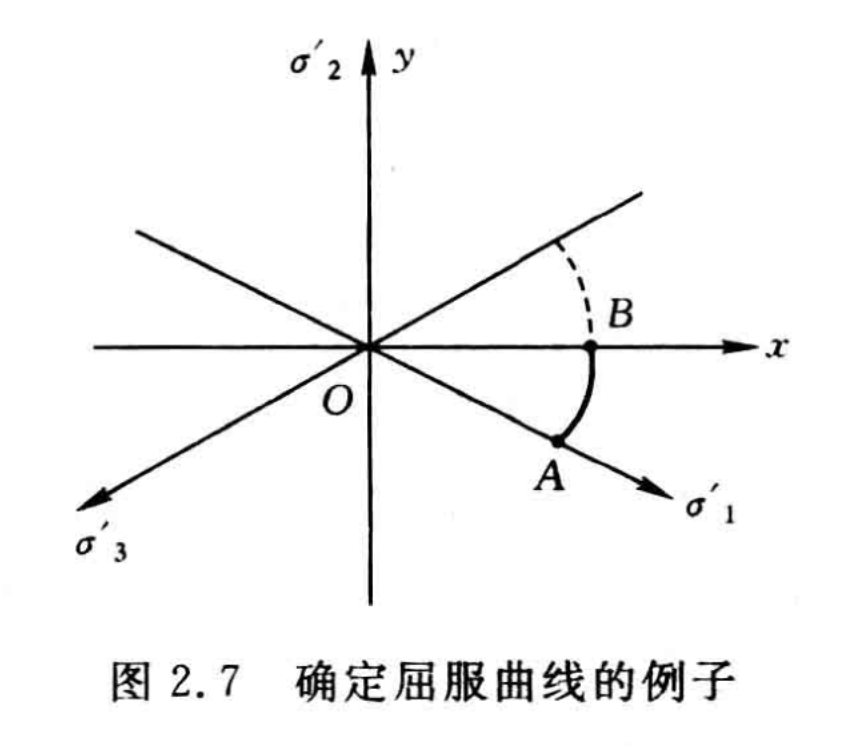
(2)由纯剪试验知道
可以确定B点
(3)\(AB\)之间的曲线需通过双向应力试验确定 例如,使用两端不封闭的薄壁圆管(平均管径 \(r\),壁厚 \(t)\)进行在内压和轴向拉伸联合作用下的试验。
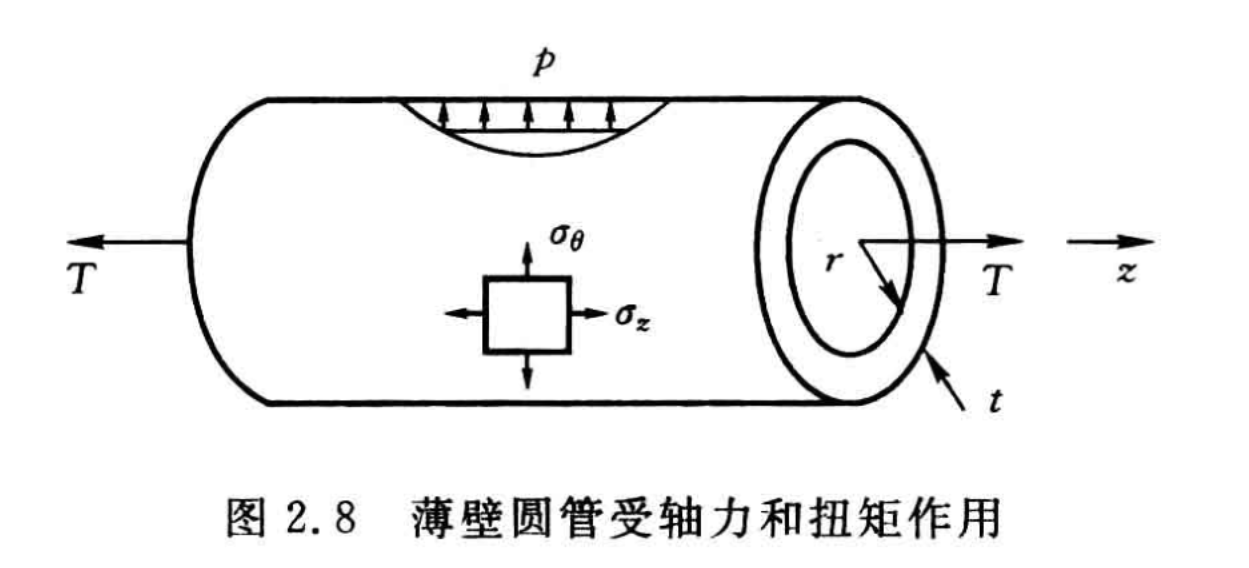
设内压为 \(p\), 轴向拉力为 \(T\),则有
[推导上式的提示]
(1) \(pr\int _{0}^{\pi }\)sin\(\theta\)d\(\theta = 2\sigma _{\theta }t\) ;
(2) \(T= 2\pi rt\sigma _{z}\) ;
\((3)\sigma_{r}\approx0(即沿壁厚迅速衰减为零)\)。
实际上,薄壁圆管承受内压、轴向拉力以及扭转的试验是宏观研究塑性变形的基本试验方法。自从 1900 年 Guest 采用以来,许多学者用薄壁圆管试样来研究此类在复杂应力状态下的屈服条件、强化条件和应力-应变关系。
2.5 常用的屈服条件
1.Tresca 屈服条件
法国工程师 H. Tresca 在 1864 年做了一系列将韧性金属挤过不同形状模子的试验。他发现,在变形金属的表面有很细的痕纹,它们的方向很接近最大剪应力的方向。根据这一现象,他认为金属的塑性变形是由于剪切应力引起金属中晶体滑移而造成的。从这些金属挤压试验结果,Tresca 提出了如下的屈服条件。
当最大剪应力达到材料所固有的某个定值时,材料开始进入塑性状态,即开始屈服。
这个条件就称为最大剪应力条件,又称 Tresca 条件,其数学表达式为
这里k是和材料有关的一个常数。若已知主应力大小顺序为 $\sigma_1\geqslant\sigma_2\geqslant\sigma_3 $,上式可写为
即
一般情况下,往往无法事先判明各点的三个主应力大小的次序, 所以通常将该条件写成如下形式
上式中至少有一个等式成立时,材料才开始塑性变形,即达到屈服,否则仍处于弹性阶段。因为 \(k>0\),上述三个式子不可能同时取等号。
如要将该条件表示成完整的式子,可将式改写成一般形式
并将其展开,并用不变量 \(I_2(S_{ij}),I_3(S_{ij})\)来表示,则为
很显然,这个式子太复杂了,不方便使用。因此,当主应力大小次序未知时,一般不用。
再来观察Tresca条件的屈服曲线形状。
由式(2.2.1)的第一式,\(x=\frac{\sqrt{2}}{2}(\sigma_{1}-\sigma_{3})=\frac{\sqrt{2}}{2}k=\)const 知,在 \(\pi\) 平面上\(-30^\circ\geqslant\) $\theta_{\mathrm{。}}\geqslant\(30°的范围内,屈服曲线是一直线。再据前面讨论的对称性即可得出结论: Tresca 屈服条件在\)\pi\(平面上是一个正六边形,称为 Tresca 六边形。在三维应力空间中,屈服面是一个以\)L\(为轴线的正六棱柱体。Tresca 六边形的外接圆的半径为\)r=\sqrt{\frac{2}{3}}k\(,其内切圆的半径为\)\frac k{\sqrt{2}}$,如图 2.10 所示。
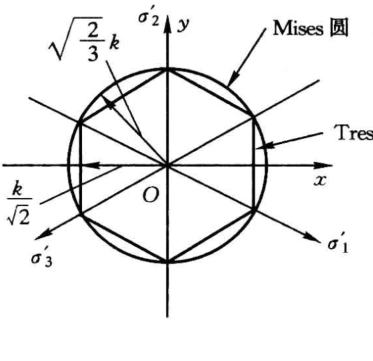
图 2.10 Tresca 和 Mises 屈服曲线
Tresca 屈服条件的特点是:
物理观念明确,有清楚的物理解释;当已知三个主应力次序\(\sigma_1\geqslant\sigma_2\geqslant\sigma_3\)时,是主应力的线性函数,表达式形式简单。 未考虑中间主应力 σ_2 对屈服的贡献; 当未知主应力顺序时,形式过于复杂; 屈服曲线上有角点,为非光滑曲线,这给数学处理上带来了困难。
2. Mises 屈服条件
当主应力大小顺序未知时,Tresca 条件的表达式用于空间问题时在数学解答上是有困难的。德国的 R. von Mises 于 1913 年提出,可将 Tresca 六边形的外接圆作为屈服曲线,其方程为
Mises 在提出这个屈服条件时,认为自己提出的条件只是近似的,并非准确的屈服条件。但以后的实验结果表明,对于韧性金属材料,它更接近于实验情况。该条件表明,当应力强度达到某一确定数值时,材料即进入屈服状态,它就称为应力强度不变条件,又称 Mises 屈服条件(也有称 Huber-von Mises 屈服条件)。在应力空间中,Mises 条件表示的屈服面是以\(L\)为轴线、垂直于\(\pi\)平面的圆柱面。
Mises 屈服条件考虑了中间应力对屈服的影响,在形式上克服了 Tresca 条件的缺点,而且可以用一个统一的式子来表示。
据\(\sigma_i\)的表达式,Mises 条件还可以写为
在 Mises 条件提出之后,不少学者试图对其物理意义进行解释。现择要介绍
如下。
-
德国 H. Hencky 于 1924 年指出,Mises 条件是用一点的形状改变比能来
衡量屈服与否的能量准则。
根据弹性理论,弹性总比能为\[\begin{aligned}\text{W}&=\frac{1}{2}(\sigma_{1}\varepsilon_{1}+\sigma_{2}\varepsilon_{2}+\sigma_{3}\varepsilon_{3})\\&=\frac{1}{2E}[\sigma_{1}^{2}+\sigma_{2}^{2}+\sigma_{3}^{2}-2\nu(\sigma_{1}\sigma_{2}+\sigma_{2}\sigma_{3}+\sigma_{3}\sigma_{1})]\end{aligned} \]体积变化比能为
形状改变比能(又称弹性形变比能、歪形能)定义为\(W_\mathrm{d}=W-W_\mathrm{v}\), 则
- A. L. Nadai 于 1937 年提出,当八面体剪应力达到某一定值时,材料进入屈服状态。这是由于 \(\tau_{5}=\sqrt{\frac{2}{3}J_{2}}=\frac{\sqrt{2}}{3}\sigma_{i}=\frac{\sqrt{2}}{3}k\)
- 前苏联力学家伊留中(A. A. Ilyushin)基于\(\frac{1}{3}k^{2}\) 提出,Mises 条件意味

 浙公网安备 33010602011771号
浙公网安备 33010602011771号