ncnn推理tagv5.0版本的yolov5的v5.0预训练模型
参考:https://raychiu.blog.csdn.net/article/details/122534656
一、下载代码和模型
#下载v5.0
git clone -b v5.0 git://github.com/ultralytics/yolov5
#下载v5.0的预训练模型
wget https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.pt
二、导出onnx模型
python models/export.py --weights ./runs/train/exp22/weights/yolov5.pt
python -m onnxsim yolov5s.onnx yolov5s-sim.onnx
三、配置ncnn并生成param和bin文件
ncnn环境配置请见:https://raychiu.blog.csdn.net/article/details/122307707
生成命令:~/data/packages/ncnn/build/tools/onnx/onnx2ncnn yolov5s-sim.onnx yolov5s-sim.param yolov5s-sim.bin
四、编辑param文件
第一个修改的地方是修改focus:
原来是这样:
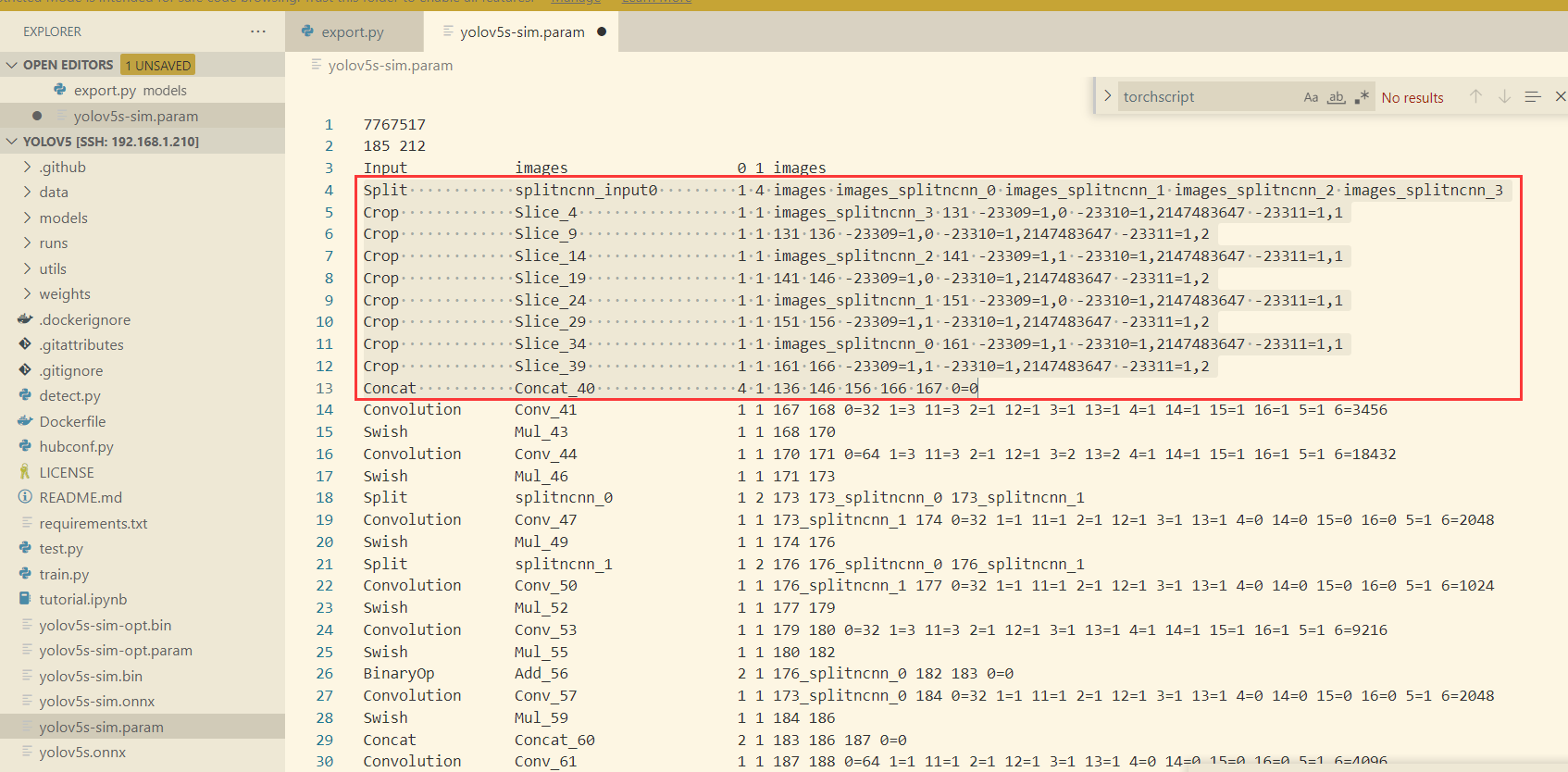
把input下一层开始到concat删除,用一行YoloV5Focus代替,如下:
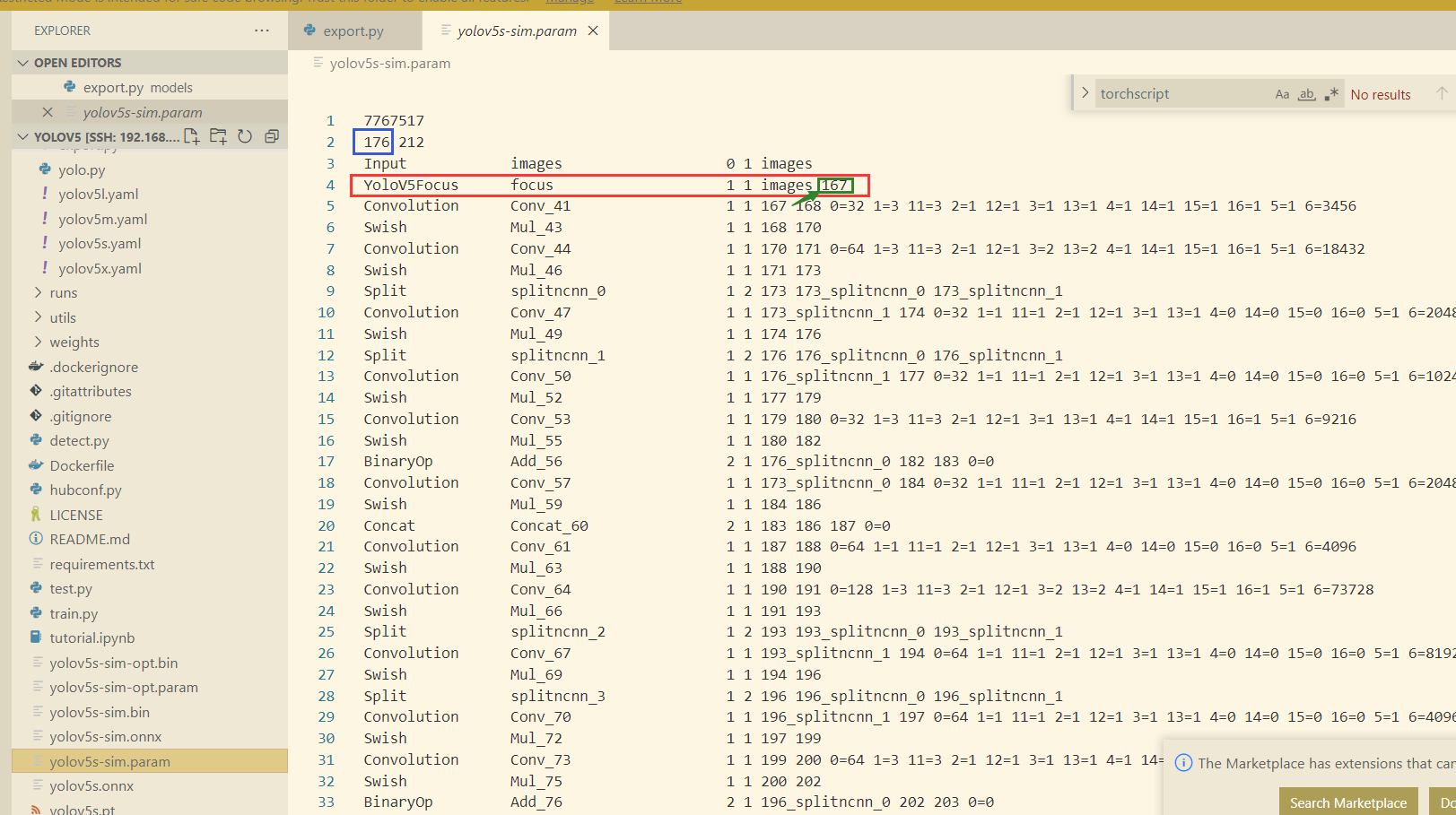
红色是增加的,蓝色框行数要相应做减法,应该这里减去9行就对了,绿色要对应起来。
YoloV5Focus是自定义的层,需要自定义后并注册,后边给出代码实现。
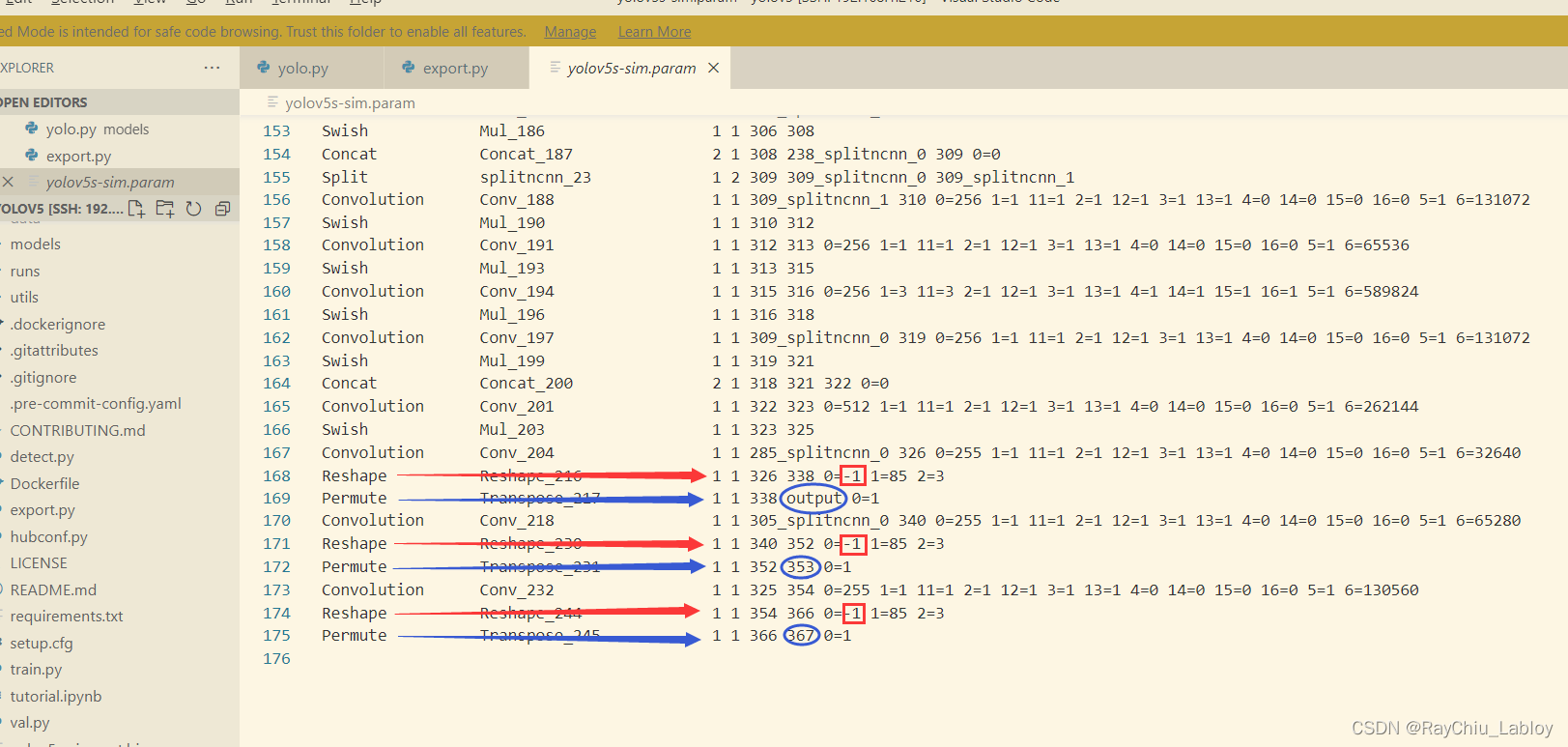
第二个修改的地方是动态推理:
下边的红色矩形框位置要改为-1,蓝色椭圆框的值记住用于对应输出。
五、用ncnnoptimize优化工具过一下param和bin
#ncnnoptimize工具目录和param、bin的路径以及生成的路径自己对应自己的
./ncnnoptimize /home/raychiu/data/projects/pyHome/yolov5/yolov5s-sim.param /home/raychiu/data/projects/pyHome/yolov5/yolov5s-sim.bin /home/raychiu/data/projects/pyHome/yolov5/yolov5s-sim-opt.param /home/raychiu/data/projects/pyHome/yolov5/yolov5s-sim-opt.bin 65536
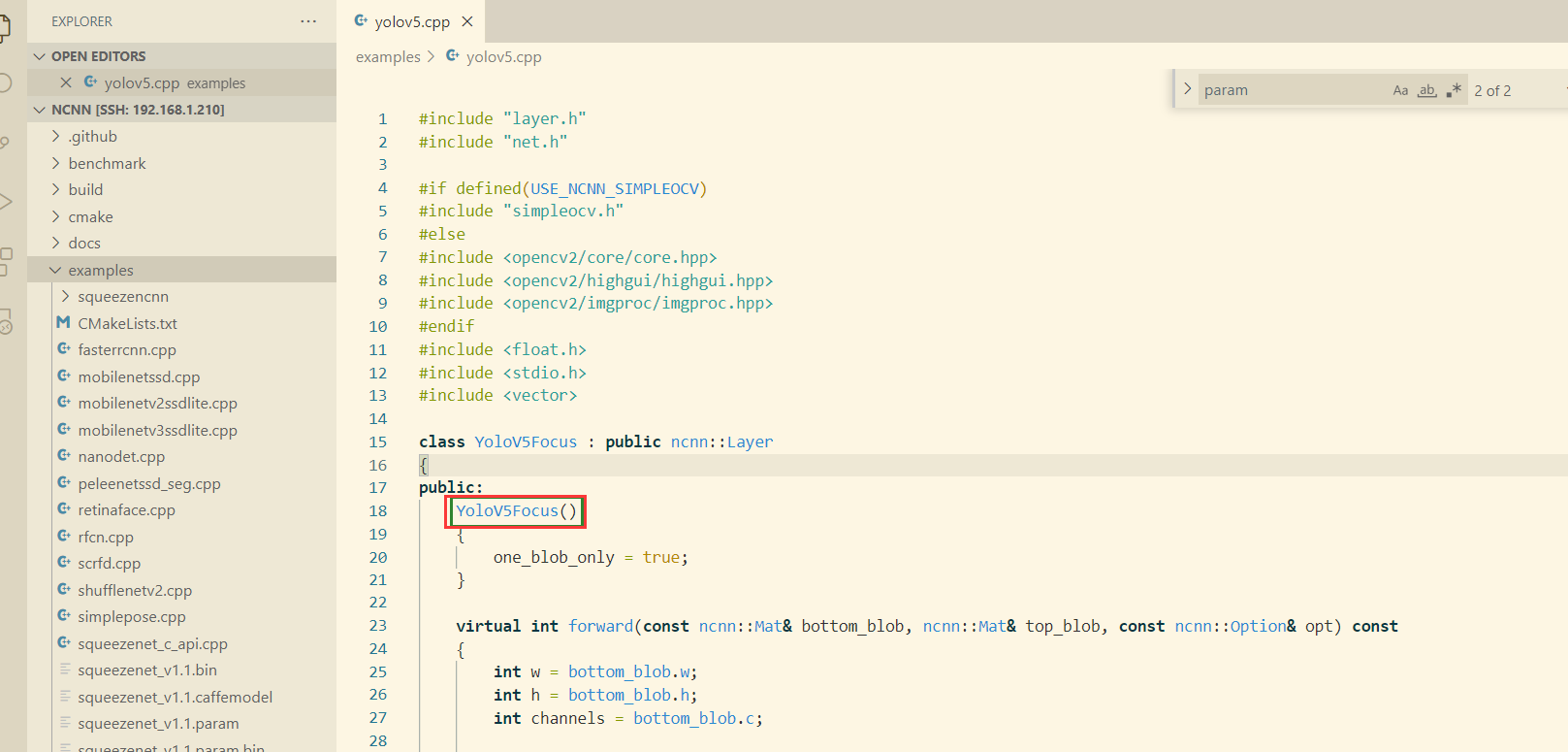
六、ncnn根目录下的examples里的yolov5.cpp内容调整
#include "layer.h" #include "net.h" #if defined(USE_NCNN_SIMPLEOCV) #include "simpleocv.h" #else #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #endif #include <float.h> #include <stdio.h> #include <vector> class YoloV5Focus : public ncnn::Layer { public: YoloV5Focus() { one_blob_only = true; } virtual int forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob, const ncnn::Option& opt) const { int w = bottom_blob.w; int h = bottom_blob.h; int channels = bottom_blob.c; int outw = w / 2; int outh = h / 2; int outc = channels * 4; top_blob.create(outw, outh, outc, 4u, 1, opt.blob_allocator); if (top_blob.empty()) return -100; #pragma omp parallel for num_threads(opt.num_threads) for (int p = 0; p < outc; p++) { const float* ptr = bottom_blob.channel(p % channels).row((p / channels) % 2) + ((p / channels) / 2); float* outptr = top_blob.channel(p); for (int i = 0; i < outh; i++) { for (int j = 0; j < outw; j++) { *outptr = *ptr; outptr += 1; ptr += 2; } ptr += w; } } return 0; } }; DEFINE_LAYER_CREATOR(YoloV5Focus) struct Object { cv::Rect_<float> rect; int label; float prob; }; static inline float intersection_area(const Object& a, const Object& b) { cv::Rect_<float> inter = a.rect & b.rect; return inter.area(); } static void qsort_descent_inplace(std::vector<Object>& faceobjects, int left, int right) { int i = left; int j = right; float p = faceobjects[(left + right) / 2].prob; while (i <= j) { while (faceobjects[i].prob > p) i++; while (faceobjects[j].prob < p) j--; if (i <= j) { // swap std::swap(faceobjects[i], faceobjects[j]); i++; j--; } } #pragma omp parallel sections { #pragma omp section { if (left < j) qsort_descent_inplace(faceobjects, left, j); } #pragma omp section { if (i < right) qsort_descent_inplace(faceobjects, i, right); } } } static void qsort_descent_inplace(std::vector<Object>& faceobjects) { if (faceobjects.empty()) return; qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1); } static void nms_sorted_bboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold) { picked.clear(); const int n = faceobjects.size(); std::vector<float> areas(n); for (int i = 0; i < n; i++) { areas[i] = faceobjects[i].rect.area(); } for (int i = 0; i < n; i++) { const Object& a = faceobjects[i]; int keep = 1; for (int j = 0; j < (int)picked.size(); j++) { const Object& b = faceobjects[picked[j]]; // intersection over union float inter_area = intersection_area(a, b); float union_area = areas[i] + areas[picked[j]] - inter_area; // float IoU = inter_area / union_area if (inter_area / union_area > nms_threshold) keep = 0; } if (keep) picked.push_back(i); } } static inline float sigmoid(float x) { return static_cast<float>(1.f / (1.f + exp(-x))); } static void generate_proposals(const ncnn::Mat& anchors, int stride, const ncnn::Mat& in_pad, const ncnn::Mat& feat_blob, float prob_threshold, std::vector<Object>& objects) { const int num_grid = feat_blob.h; int num_grid_x; int num_grid_y; if (in_pad.w > in_pad.h) { num_grid_x = in_pad.w / stride; num_grid_y = num_grid / num_grid_x; } else { num_grid_y = in_pad.h / stride; num_grid_x = num_grid / num_grid_y; } const int num_class = feat_blob.w - 5; const int num_anchors = anchors.w / 2; for (int q = 0; q < num_anchors; q++) { const float anchor_w = anchors[q * 2]; const float anchor_h = anchors[q * 2 + 1]; const ncnn::Mat feat = feat_blob.channel(q); for (int i = 0; i < num_grid_y; i++) { for (int j = 0; j < num_grid_x; j++) { const float* featptr = feat.row(i * num_grid_x + j); // find class index with max class score int class_index = 0; float class_score = -FLT_MAX; for (int k = 0; k < num_class; k++) { float score = featptr[5 + k]; if (score > class_score) { class_index = k; class_score = score; } } float box_score = featptr[4]; float confidence = sigmoid(box_score) * sigmoid(class_score); if (confidence >= prob_threshold) { // yolov5/models/yolo.py Detect forward // y = x[i].sigmoid() // y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i].to(x[i].device)) * self.stride[i] # xy // y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh float dx = sigmoid(featptr[0]); float dy = sigmoid(featptr[1]); float dw = sigmoid(featptr[2]); float dh = sigmoid(featptr[3]); float pb_cx = (dx * 2.f - 0.5f + j) * stride; float pb_cy = (dy * 2.f - 0.5f + i) * stride; float pb_w = pow(dw * 2.f, 2) * anchor_w; float pb_h = pow(dh * 2.f, 2) * anchor_h; float x0 = pb_cx - pb_w * 0.5f; float y0 = pb_cy - pb_h * 0.5f; float x1 = pb_cx + pb_w * 0.5f; float y1 = pb_cy + pb_h * 0.5f; Object obj; obj.rect.x = x0; obj.rect.y = y0; obj.rect.width = x1 - x0; obj.rect.height = y1 - y0; obj.label = class_index; obj.prob = confidence; objects.push_back(obj); } } } } } static int detect_yolov5(const cv::Mat& bgr, std::vector<Object>& objects) { ncnn::Net yolov5; yolov5.opt.use_vulkan_compute = true; // yolov5.opt.use_bf16_storage = true; yolov5.register_custom_layer("YoloV5Focus", YoloV5Focus_layer_creator); // original pretrained model from https://github.com/ultralytics/yolov5 // the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models yolov5.load_param("yolov5s-sim-opt.param"); yolov5.load_model("yolov5s-sim-opt.bin"); const int target_size = 640; const float prob_threshold = 0.25f; const float nms_threshold = 0.45f; int img_w = bgr.cols; int img_h = bgr.rows; // letterbox pad to multiple of 32 int w = img_w; int h = img_h; float scale = 1.f; if (w > h) { scale = (float)target_size / w; w = target_size; h = h * scale; } else { scale = (float)target_size / h; h = target_size; w = w * scale; } ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h); // pad to target_size rectangle // yolov5/utils/datasets.py letterbox int wpad = (w + 31) / 32 * 32 - w; int hpad = (h + 31) / 32 * 32 - h; ncnn::Mat in_pad; ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f); const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f}; in_pad.substract_mean_normalize(0, norm_vals); ncnn::Extractor ex = yolov5.create_extractor(); ex.input("images", in_pad); std::vector<Object> proposals; // anchor setting from yolov5/models/yolov5s.yaml // stride 8 { ncnn::Mat out; ex.extract("output", out); ncnn::Mat anchors(6); anchors[0] = 10.f; anchors[1] = 13.f; anchors[2] = 16.f; anchors[3] = 30.f; anchors[4] = 33.f; anchors[5] = 23.f; std::vector<Object> objects8; generate_proposals(anchors, 8, in_pad, out, prob_threshold, objects8); proposals.insert(proposals.end(), objects8.begin(), objects8.end()); } // stride 16 { ncnn::Mat out; ex.extract("405", out); //对应网络修改 ncnn::Mat anchors(6); anchors[0] = 30.f; anchors[1] = 61.f; anchors[2] = 62.f; anchors[3] = 45.f; anchors[4] = 59.f; anchors[5] = 119.f; std::vector<Object> objects16; generate_proposals(anchors, 16, in_pad, out, prob_threshold, objects16); proposals.insert(proposals.end(), objects16.begin(), objects16.end()); } // stride 32 { ncnn::Mat out; ex.extract("419", out); //对应网络修改 ncnn::Mat anchors(6); anchors[0] = 116.f; anchors[1] = 90.f; anchors[2] = 156.f; anchors[3] = 198.f; anchors[4] = 373.f; anchors[5] = 326.f; std::vector<Object> objects32; generate_proposals(anchors, 32, in_pad, out, prob_threshold, objects32); proposals.insert(proposals.end(), objects32.begin(), objects32.end()); } // sort all proposals by score from highest to lowest qsort_descent_inplace(proposals); // apply nms with nms_threshold std::vector<int> picked; nms_sorted_bboxes(proposals, picked, nms_threshold); int count = picked.size(); objects.resize(count); for (int i = 0; i < count; i++) { objects[i] = proposals[picked[i]]; // adjust offset to original unpadded float x0 = (objects[i].rect.x - (wpad / 2)) / scale; float y0 = (objects[i].rect.y - (hpad / 2)) / scale; float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale; float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale; // clip x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f); y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f); x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f); y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f); objects[i].rect.x = x0; objects[i].rect.y = y0; objects[i].rect.width = x1 - x0; objects[i].rect.height = y1 - y0; } return 0; } static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects) { static const char* class_names[] = { "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush" }; cv::Mat image = bgr.clone(); for (size_t i = 0; i < objects.size(); i++) { const Object& obj = objects[i]; fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob, obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height); cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0)); char text[256]; sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob); int baseLine = 0; cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine); int x = obj.rect.x; int y = obj.rect.y - label_size.height - baseLine; if (y < 0) y = 0; if (x + label_size.width > image.cols) x = image.cols - label_size.width; cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)), cv::Scalar(255, 255, 255), -1); cv::putText(image, text, cv::Point(x, y + label_size.height), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0)); } cv::imwrite("1.jpg", image); // cv::waitKey(0); } int main(int argc, char** argv) { if (argc != 2) { fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]); return -1; } const char* imagepath = argv[1]; cv::Mat m = cv::imread(imagepath, 1); if (m.empty()) { fprintf(stderr, "cv::imread %s failed\n", imagepath); return -1; } std::vector<Object> objects; detect_yolov5(m, objects); draw_objects(m, objects); return 0; }
上边的代码中已经加了自定义的focus层:
同样的已经对应了我自己的param和bin文件:
输出也对应了param里的permute:
七、重新编译ncnn并测试
流程和 https://raychiu.blog.csdn.net/article/details/122534656 一样,其实yolov5的v5.0和v6.0就差在自定义focus这里了,v6.0方便,但是v5.0用的还是比较多的,因为其他许多工具库大多支持到了5.0
posted on 2022-01-25 15:45 raychiu0202 阅读(831) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号