多变量回归
1. 多元特征
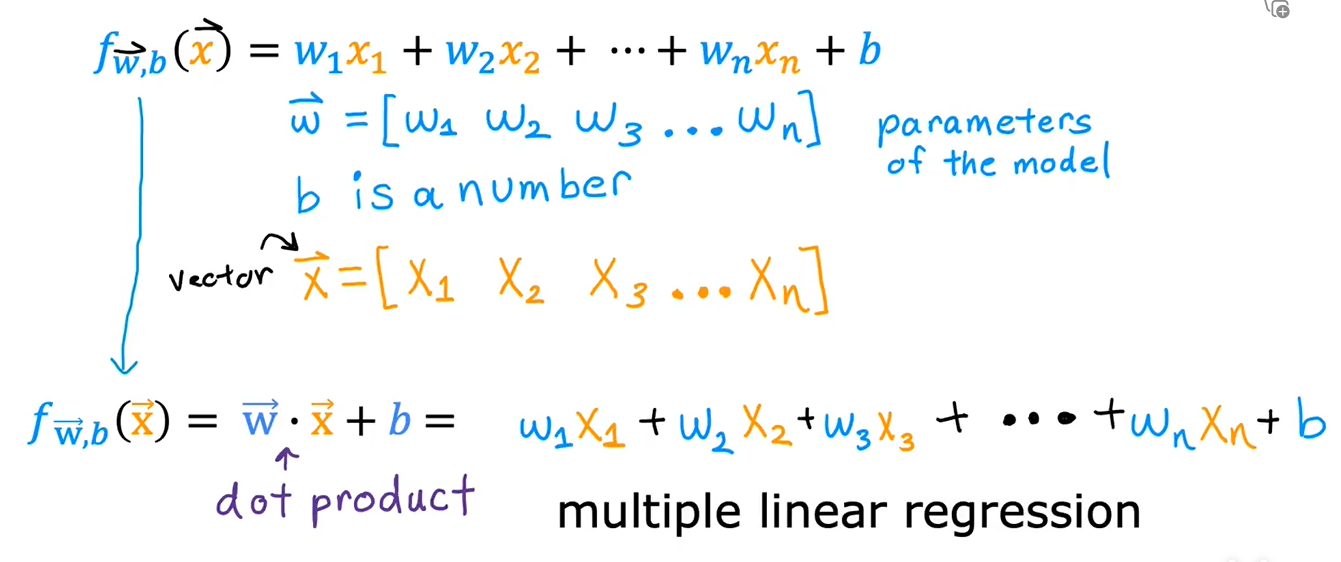
这种具有多个输入特征的线性回归模型被称为,多元线性回归
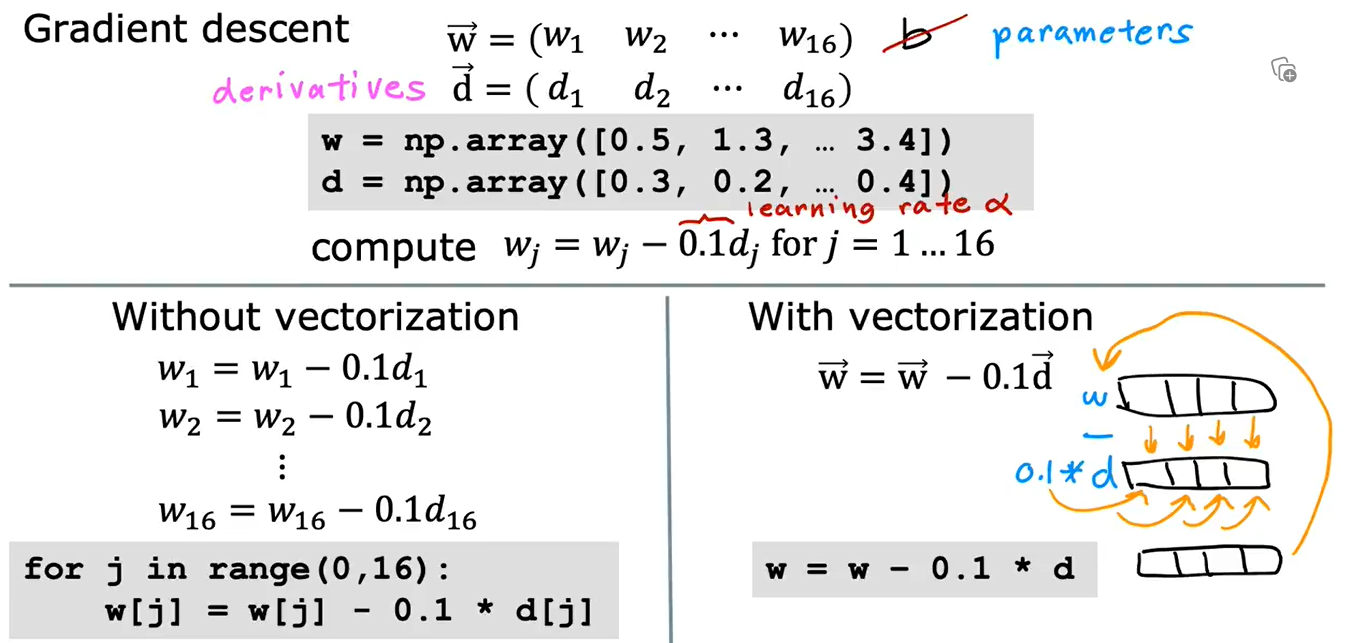
2. 向量化及Numpy
numpy官方说明链接
NumPy 是一个库,它扩展了 python 的基本功能,增加了更丰富的数据集,包括更多数字类型、向量、矩阵和许多矩阵函数。NumPy 和 python 可以无缝协作。Python 算术运算符可用于 NumPy 数据类型,许多 NumPy 函数也可接受 Python 数据类型。NumPy 的基本数据结构是一个可索引的 n 维数组,其中包含相同类型(dtype)的元素。
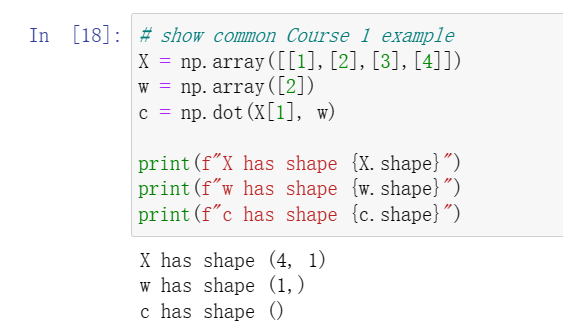
- 关于shape
- 关于reshape
a = np.arange(6).reshape(3, 2)
重塑命令将a变为 3 行 2 列数组。
参数-1 会告诉例程根据数组的大小和列数计算行数,例如:

Numpy中的dot函数,是两个向量点乘运算的向量化实现
当我们要运算\(f = w_1x_1 + w_2x_2 + ... + w_nx_n\)时,我们可以这样写
import numpy as np
w = np.array([1.0,2.5,-3.3])
b = 4
x = np.array([10,20,30])
f = 0
for i in range(w.shape[0]):
f += w[i]*x[i]
f += b
利用dot函数,可以这样写
f = np.dot(w , x) + b
不仅更加简单,而且运算效率会更高
也可以与数字相乘
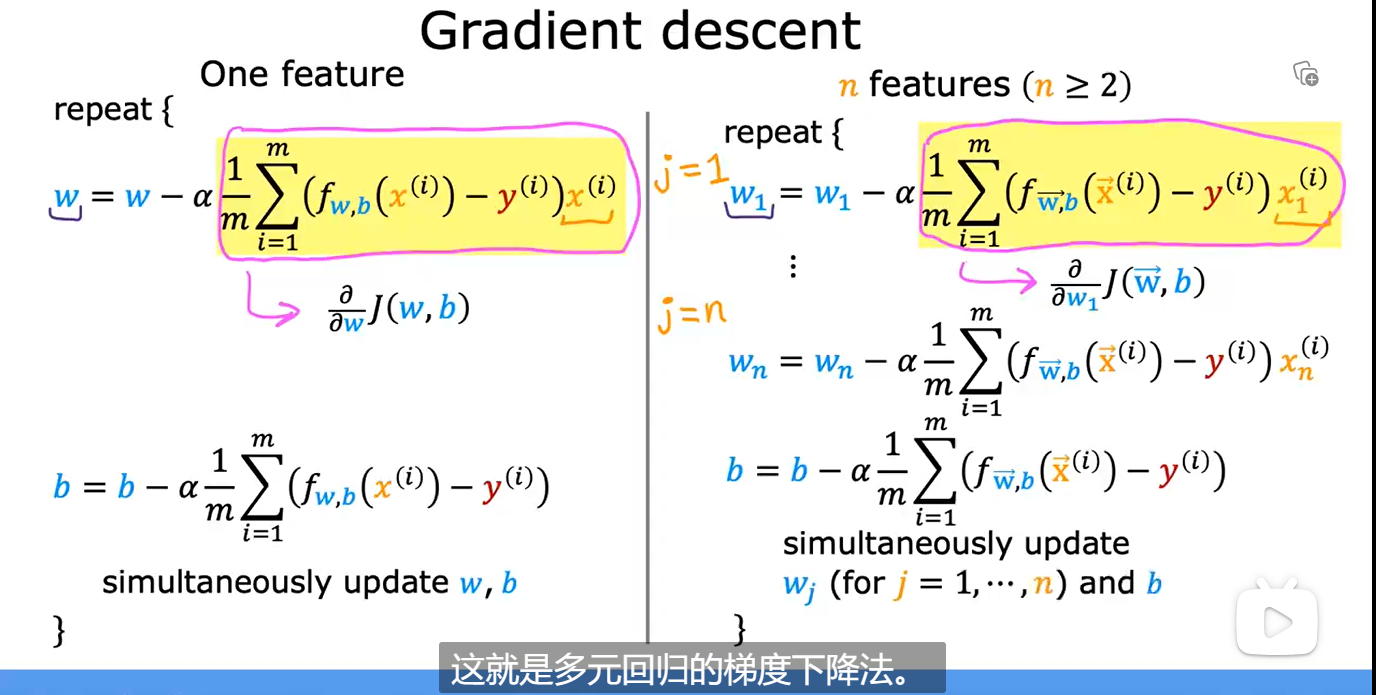
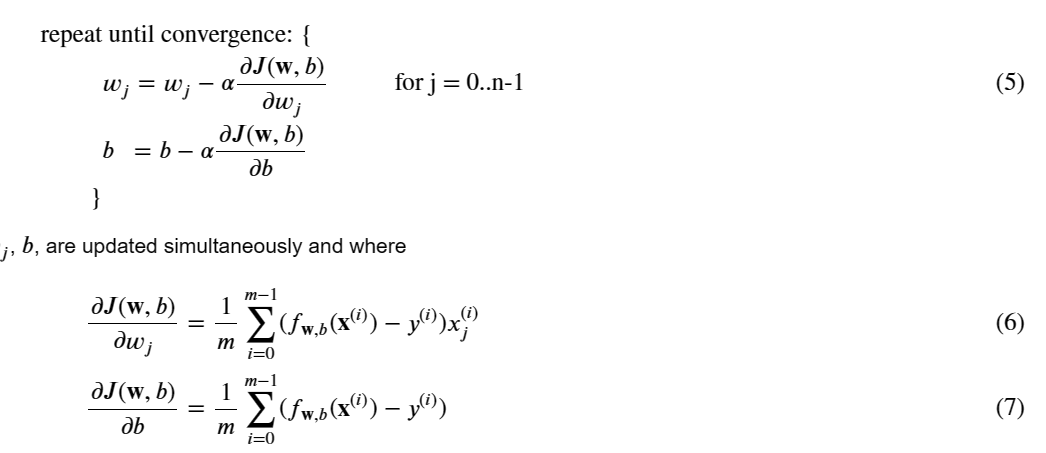
3. 多元线性回归的梯度下降
计算上述两式:
def compute_cost(X, y, w, b):
"""
compute cost
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns:
cost (scalar): cost
"""
m = X.shape[0]
cost = 0.0
for i in range(m):
f_wb_i = np.dot(X[i], w) + b #(n,)(n,) = scalar (see np.dot)
cost = cost + (f_wb_i - y[i])**2 #scalar
cost = cost / (2 * m) #scalar
return cost
cost = compute_cost(X_train, y_train, w_init, b_init)
计算6、7式的:
def compute_gradient(X, y, w, b):
"""
Computes the gradient for linear regression
Args:
X (ndarray (m,n)): Data, m examples with n features
y (ndarray (m,)) : target values
w (ndarray (n,)) : model parameters
b (scalar) : model parameter
Returns:
dj_dw (ndarray (n,)): The gradient of the cost w.r.t. the parameters w.
dj_db (scalar): The gradient of the cost w.r.t. the parameter b.
"""
m,n = X.shape #(number of examples, number of features)
dj_dw = np.zeros((n,))
dj_db = 0.
for i in range(m):
err = (np.dot(X[i], w) + b) - y[i]
for j in range(n):
dj_dw[j] = dj_dw[j] + err * X[i, j]
dj_db = dj_db + err
dj_dw = dj_dw / m
dj_db = dj_db / m
return dj_db, dj_dw
tmp_dj_db, tmp_dj_dw = compute_gradient(X_train, y_train, w_init, b_init)
计算5式:
def gradient_descent(X, y, w_in, b_in, cost_function, gradient_function, alpha, num_iters):
"""
Performs batch gradient descent to learn w and b. Updates w and b by taking
num_iters gradient steps with learning rate alpha
Args:
X (ndarray (m,n)) : Data, m examples with n features
y (ndarray (m,)) : target values
w_in (ndarray (n,)) : initial model parameters
b_in (scalar) : initial model parameter
cost_function : function to compute cost
gradient_function : function to compute the gradient
alpha (float) : Learning rate
num_iters (int) : number of iterations to run gradient descent
Returns:
w (ndarray (n,)) : Updated values of parameters
b (scalar) : Updated value of parameter
"""
# An array to store cost J and w's at each iteration primarily for graphing later
J_history = []
w = copy.deepcopy(w_in) #avoid modifying global w within function
b = b_in
for i in range(num_iters):
# Calculate the gradient and update the parameters
dj_db,dj_dw = gradient_function(X, y, w, b) ##None
# Update Parameters using w, b, alpha and gradient
w = w - alpha * dj_dw ##None
b = b - alpha * dj_db ##None
# Save cost J at each iteration
if i<100000: # prevent resource exhaustion
J_history.append( cost_function(X, y, w, b))
# Print cost every at intervals 10 times or as many iterations if < 10
if i% math.ceil(num_iters / 10) == 0:
print(f"Iteration {i:4d}: Cost {J_history[-1]:8.2f} ")
return w, b, J_history #return final w,b and J history for graphing
测试:
# initialize parameters
initial_w = np.zeros_like(w_init)
initial_b = 0.
# some gradient descent settings
iterations = 1000
alpha = 5.0e-7
# run gradient descent
w_final, b_final, J_hist = gradient_descent(X_train, y_train, initial_w, initial_b,
compute_cost, compute_gradient,
alpha, iterations)
print(f"b,w found by gradient descent: {b_final:0.2f},{w_final} ")
m,_ = X_train.shape
for i in range(m):
print(f"prediction: {np.dot(X_train[i], w_final) + b_final:0.2f}, target value: {y_train[i]}")
# plot cost versus iteration
fig, (ax1, ax2) = plt.subplots(1, 2, constrained_layout=True, figsize=(12, 4))
ax1.plot(J_hist)
ax2.plot(100 + np.arange(len(J_hist[100:])), J_hist[100:])
ax1.set_title("Cost vs. iteration"); ax2.set_title("Cost vs. iteration (tail)")
ax1.set_ylabel('Cost') ; ax2.set_ylabel('Cost')
ax1.set_xlabel('iteration step') ; ax2.set_xlabel('iteration step')
plt.show()
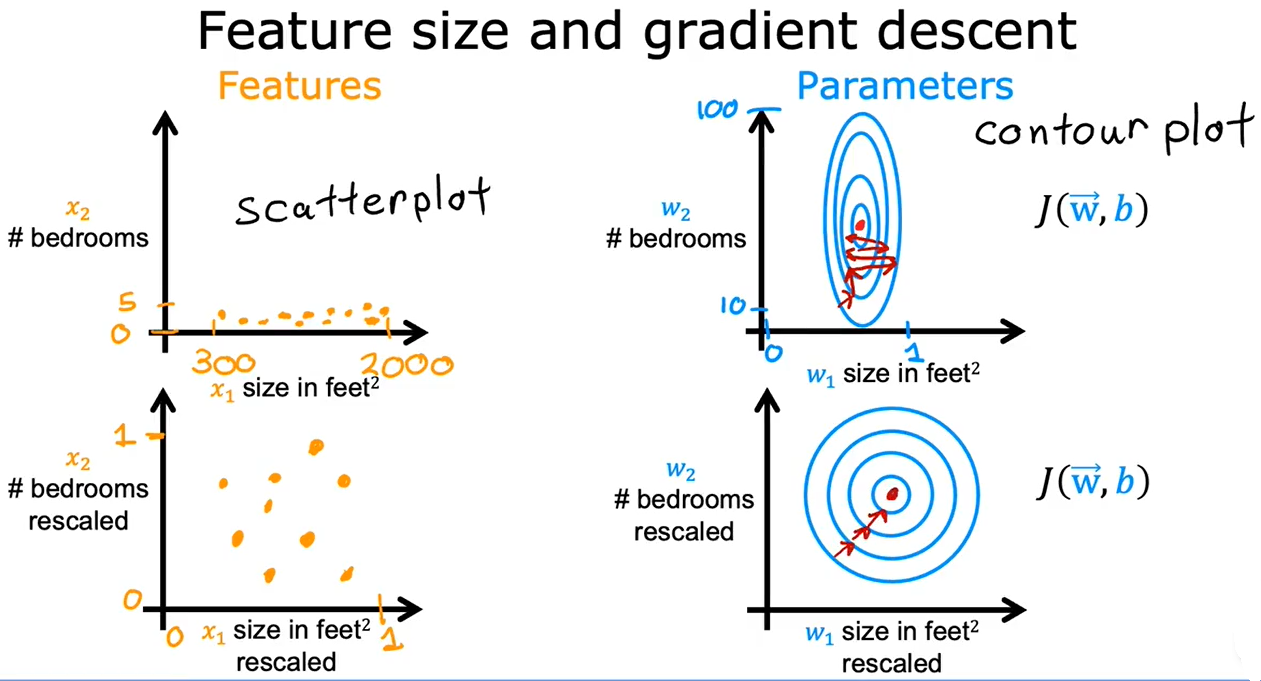
4. 特征放缩
当有不同的特征,且取值差异较大,可能导致梯度下降运行缓慢。通过重新放缩这些特征,使它们都具有可比较的值范围,可显著加快梯度下降速度
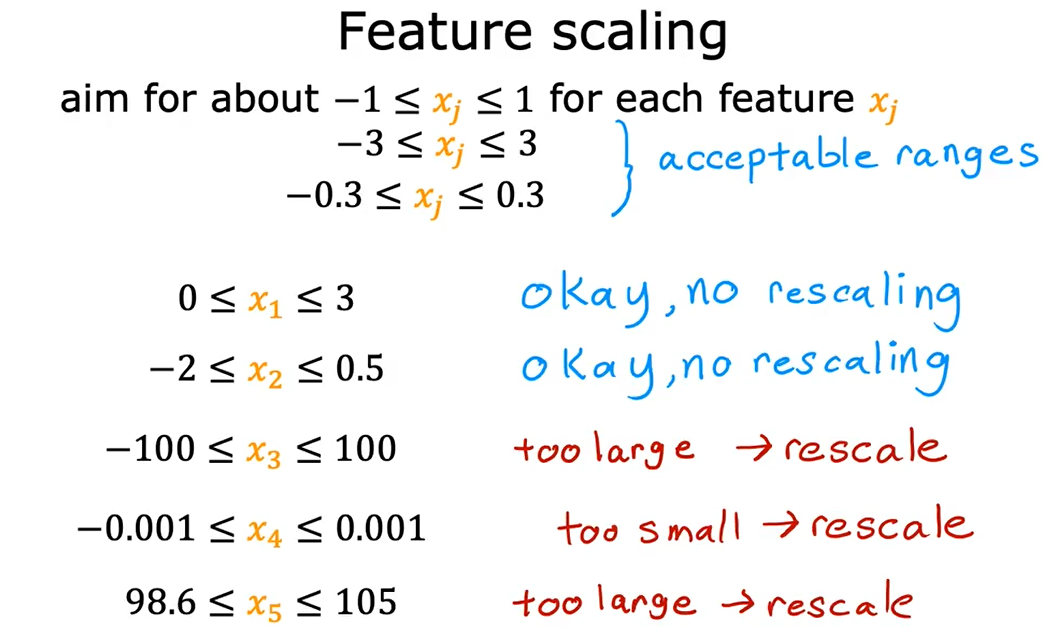
4.1 区间放缩
若都为正数,取值范围最终为[0,1]。若有正有负,分母就取\(max(abs(x))\),取值范围最终为[-1,1]
4.2 均值归一化
取值范围最终为[-1 , 1]
4.3 Z-score标准化
取值范围最终为正态分布
5. 检查梯度下降是否收敛
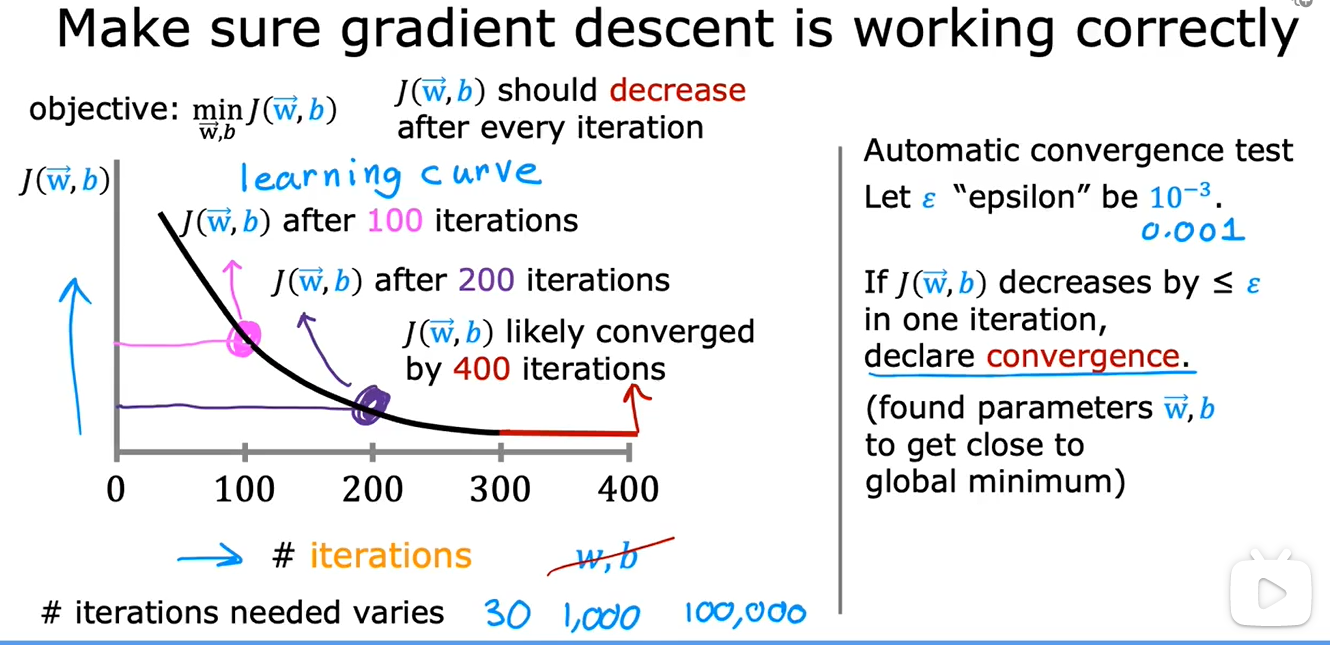
可以画一张左边这样的图,也可以使用右边的自动收敛测试,但是老师倾向于左边
6. 学习率的选择
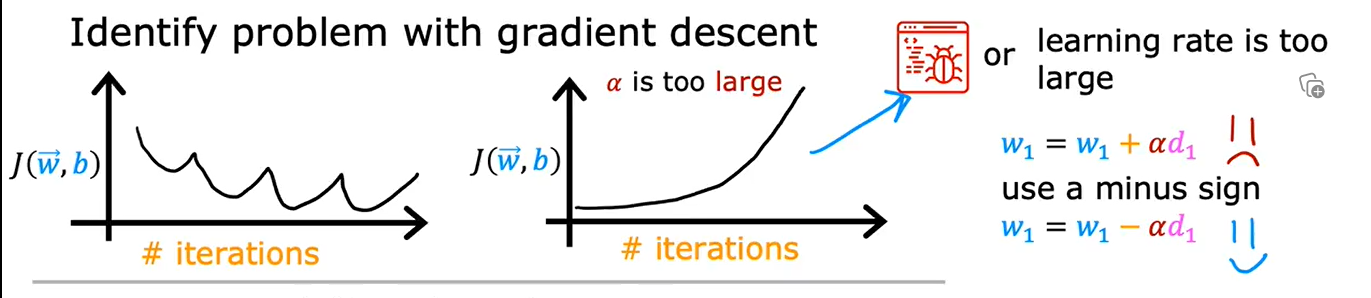
如果J反复横跳或者逐渐变大,说明代码出现了bug或者学习率设置过大
检查方法是把学习率设置为一个非常非常小的数,再跑一遍,如果还出现上述情况,就是代码有bug,例如将\(w = w - \alpha d\)写成了+
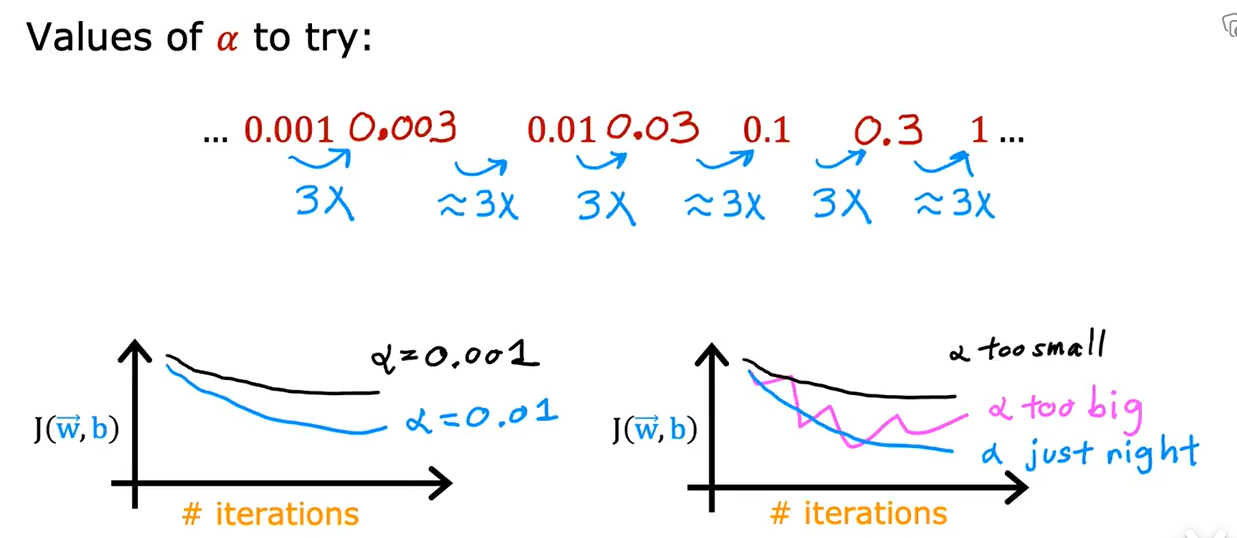
可以先设为0.001,再逐渐增加为上一次3倍的学习率并绘制迭代此处-代价函数图像,直到找到合适学习率
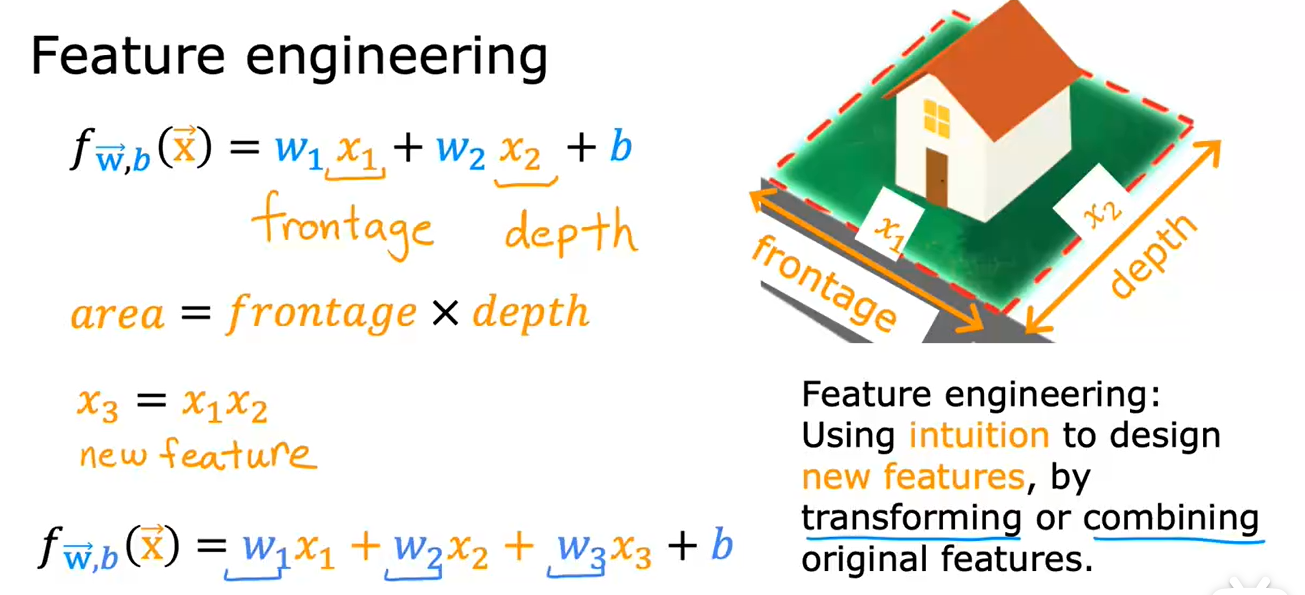
7. 特征工程
运用你的直觉或者知识去设计新的特征,通过合并或变换原有的问题特征,使其能帮助算法更简单地做出准确预测。
这取决于你对实际工程应用的理解

 浙公网安备 33010602011771号
浙公网安备 33010602011771号