

SNE+t-SNE+拉普拉斯矩阵
SNE是通过仿射(affinitie)变换将数据点映射到概率分布上,主要包括两个步骤:
- SNE构建一个高维对象之间的概率分布,使得相似的对象有更高的概率被选择,而不相似的对象有较低的概率被选择。
- SNE在低维空间里在构建这些点的概率分布,使得这两个概率分布之间尽可能的相似。
我们看到t-SNE模型是非监督的降维,他跟kmeans等不同,他不能通过训练得到一些东西之后再用于其它数据(比如kmeans可以通过训练得到k个点,再用于其它数据集,而t-SNE只能单独的对数据做操作,也就是说他只有fit_transform,而没有fit操作)
t-SNE(t-distributed stochastic neighbor embedding)是用于降维的一种机器学习算法,是由 Laurens van der Maaten 和 Geoffrey Hinton在08年提出来。此外,t-SNE 是一种非线性降维算法,非常适用于高维数据降维到2维或者3维,进行可视化。
t-SNE是由SNE(Stochastic Neighbor Embedding, SNE; Hinton and Roweis, 2002)发展而来。我们先介绍SNE的基本原理,之后再扩展到t-SNE。最后再看一下t-SNE的实现以及一些优化。
一、拉普拉斯矩阵基本定义
对于图G,一般用点的集合V和边的集合E来描述:G(V,E)。现在有这样一个图,如何定义拉普拉斯矩阵呢?这里涉及到两个常用矩阵:邻接矩阵、度矩阵。
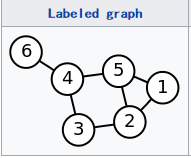
从最简单的应用入手,不同数据点相通权重为1,不相通权重为0.
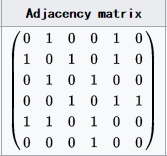
首先求解邻接矩阵W:
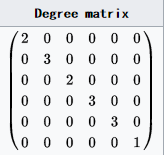
将每一列求和,这个数值的对角形式对应就是度矩阵D:
写成矩阵形式:⎜⎜⎜d
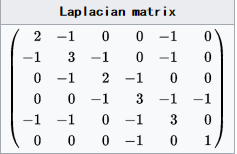
从而得到拉普拉斯矩阵L的定义:
L=D−W
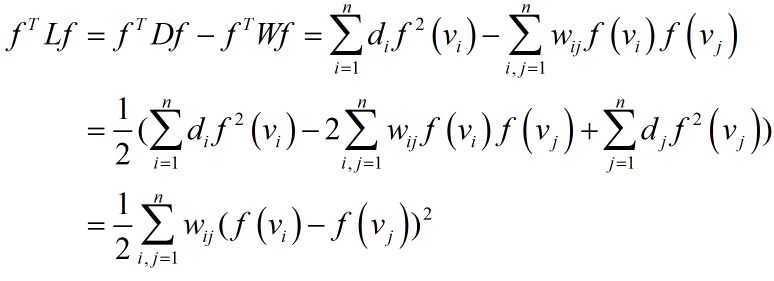
二、拉普拉斯矩阵意义及性质
f
0=λ1 ≤λ2 ≤... ≤ λn
C/C++基本语法学习
STL
C++ primer

 浙公网安备 33010602011771号
浙公网安备 33010602011771号