
转自: https://blog.csdn.net/caogos/article/details/52354686
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/caogos/article/details/52354686
本文为在用龙芯1c做3D打印机过程中的笔记。龙芯1c做的3d打印机简称“龙印”
参考了以下两篇博文,再其基础上增加了对marlin源码的注解和我的一些理解。
http://blog.sina.com.cn/s/blog_6ad165790102vo09.html
http://blog.sina.com.cn/s/blog_679933490102vv8z.html
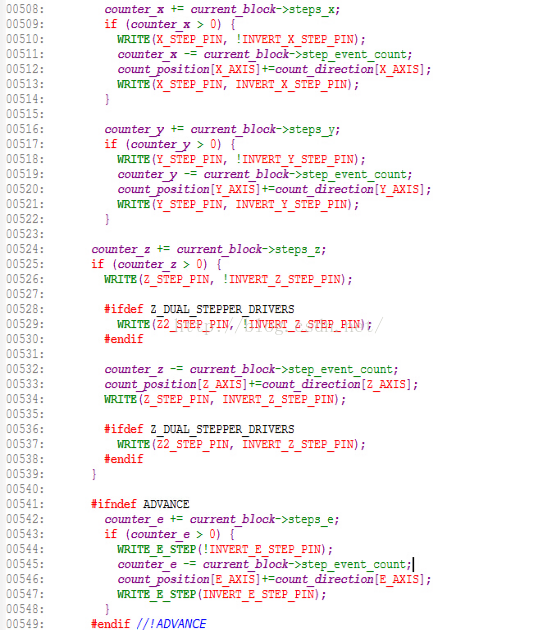
先来看一下marlin中bresenham算法的相关代码。源码位于源文件“Marlin\stepper.cpp”中的函数ISR(TIMER1_COMPA_vect)内。如下
// If there is no current block, attempt to pop one from the buffer
if (!current_block) {
// Anything in the buffer?
current_block = plan_get_current_block();
if (current_block) {
current_block->busy = true;
trapezoid_generator_reset();
counter_x = -(current_block->step_event_count >> 1);
counter_y = counter_z = counter_e = counter_x;
step_events_completed = 0;
#if ENABLED(Z_LATE_ENABLE)
if (current_block->steps[Z_AXIS] > 0) {
enable_z();
OCR1A = 2000; //1ms wait
return;
}
#endif
// #if ENABLED(ADVANCE)
// e_steps[current_block->active_extruder] = 0;
// #endif
}
else {
OCR1A = 2000; // 1kHz.
}
}
if (current_block != NULL) {
// Update endstops state, if enabled
#if ENABLED(HAS_Z_MIN_PROBE)
if (check_endstops || z_probe_is_active) update_endstops();
#else
if (check_endstops) update_endstops();
#endif
// Take multiple steps per interrupt (For high speed moves)
for (int8_t i = 0; i < step_loops; i++) {
#ifndef USBCON
customizedSerial.checkRx(); // Check for serial chars.
#endif
#if ENABLED(ADVANCE)
counter_e += current_block->steps[E_AXIS];
if (counter_e > 0) {
counter_e -= current_block->step_event_count;
e_steps[current_block->active_extruder] += TEST(out_bits, E_AXIS) ? -1 : 1;
}
#endif //ADVANCE
#define _COUNTER(axis) counter_## axis
#define _APPLY_STEP(AXIS) AXIS ##_APPLY_STEP
#define _INVERT_STEP_PIN(AXIS) INVERT_## AXIS ##_STEP_PIN
#define STEP_ADD(axis, AXIS) \
_COUNTER(axis) += current_block->steps[_AXIS(AXIS)]; \
if (_COUNTER(axis) > 0) { _APPLY_STEP(AXIS)(!_INVERT_STEP_PIN(AXIS),0); }
STEP_ADD(x,X);
STEP_ADD(y,Y);
STEP_ADD(z,Z);
#if DISABLED(ADVANCE)
STEP_ADD(e,E);
#endif
#define STEP_IF_COUNTER(axis, AXIS) \
if (_COUNTER(axis) > 0) { \
_COUNTER(axis) -= current_block->step_event_count; \
count_position[_AXIS(AXIS)] += count_direction[_AXIS(AXIS)]; \
_APPLY_STEP(AXIS)(_INVERT_STEP_PIN(AXIS),0); \
}
STEP_IF_COUNTER(x, X);
STEP_IF_COUNTER(y, Y);
STEP_IF_COUNTER(z, Z);
#if DISABLED(ADVANCE)
STEP_IF_COUNTER(e, E);
#endif
step_events_completed++;
if (step_events_completed >= current_block->step_event_count) break;
}
阅读这段代码的主要麻烦在宏STEP_ADD和STEP_IF_COUNTER。
符号“##”的作用是把前后的宏参数拼接在一起。
我们来分析“STEP_ADD(x,X)”
STEP_ADD(x,X)=_COUNTER(x) += current_block->steps[_AXIS(AXIS)]; \
if (_COUNTER(x) > 0) { _APPLY_STEP(X)(!_INVERT_STEP_PIN(X),0); }
其中,_COUNTER(x)=counter_x
_APPLY_STEP(X)=X_APPLY_STEP
_INVERT_STEP_PIN(X)=INVERT_X_STEP_PIN
_AXIS(AXIS)也类似,搜索源码会发现有“#define _AXIS(AXIS) AXIS ##_AXIS”。
宏STEP_IF_COUNTER也类似。
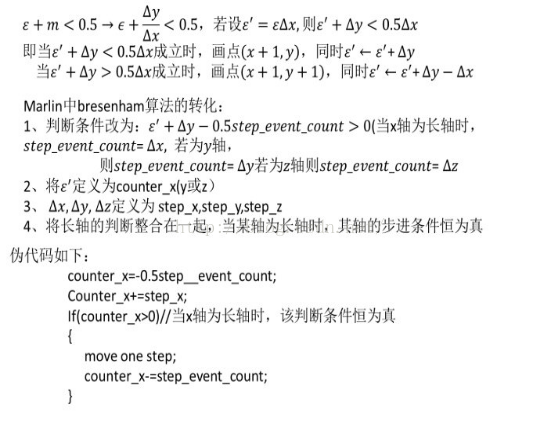
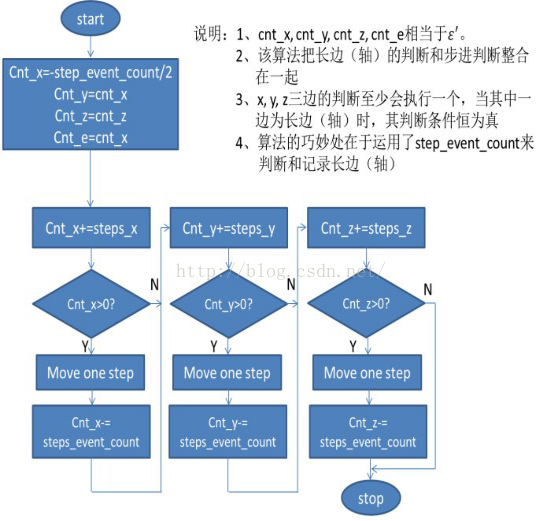
经过整理后bresenham算法可以表示为
这个代码很清晰了,可是怎么也看不出有个什么算法,哈哈。
bresenham算法是光栅化的画直线算法。直线光栅化是指用像素点来模拟直线,比如下图用蓝色的像素点来模拟红色的直线。
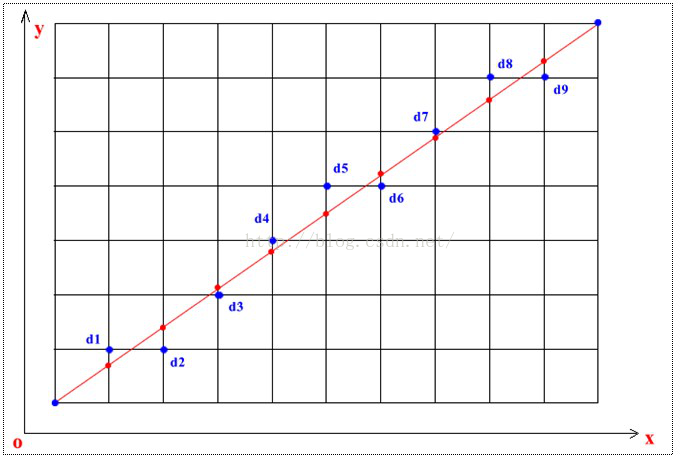
蓝色点是怎么得到的呢?取与理想中的红点最近的xy轴的交点作为蓝点。
算法是怎么与marlin源码结合的呢?
假设需要从点(0,0,0)到点(31,21,5),那么代码执行的详细情况如下
current_block->steps[X_AXIS] = 31;
current_block->steps[Y_AXIS] = 21;
current_block->steps[Z_AXIS] = 5;
current_block->step_event_count = 31;
counter_x = -(current_block->step_event_count>>1) = -15;
counter_y = counter_z = counter_e = counter_x;
第一步
Counter_x = counter_x + current_block->steps[X_AXIS] = -15 + 31 = 16;
因为条件counter_x > 0为true, 所以X电机向前走一步
counter_x = counter_x - current_block->step_event_count = 16 - 31; = -15;
counter_y = counter_y + current_block->steps[Y_AXIS] = -15 + 21 = 6;
因为条件counter_y > 0为true,所以Y电机向前走一步
counter_y = counter_y - current_block->step_event_count = 6 - 31 = -25;
counter_z = counter_z + current_block->steps[Z_AXIS] = -15 + 5 = -10;
因为条件counter_z > 0为false,所以Z电机不动
counter_z = -10;
第二步
Counter_x = counter_x + current_block->steps[X_AXIS] = -15 + 31 = 16;
因为条件counter_x > 0为true, 所以X电机向前走一步
counter_x = counter_x - current_block->step_event_count = 16 - 31 = -15;
counter_y = counter_y + current_block->steps[Y_AXIS] = -25 + 21 = -4;
因为条件counter_y > 0为false,所以Y电机不动
counter_y = -4;
counter_z = counter_z + current_block->steps[Z_AXIS] = -10 + 5 = -5;
因为条件counter_z > 0为false,所以Z电机不动
counter_z = -10;
第三步
同理
……
————————————————
版权声明:本文为CSDN博主「勤为本」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/caogos/article/details/52354686

 浙公网安备 33010602011771号
浙公网安备 33010602011771号