
[转]车载毫米波雷达开发技术(四):随机集理论与多目标跟踪
1.1 引言
传统的多目标跟踪算法往往需要对跟踪目标的量测数据进行数据关联处理,以判定接收数据来源于被跟踪目标还是杂波。当被跟踪目标数量增多时,数据关联的计算量成指数型增长,并且当被跟踪目标运动轨迹出现交叉、或者目标较为密集时,通过回波数据很难将目标与目标、目标与杂波之间区分开来,导致被跟踪目标丢失、跟踪效果不理想等问题。
随机集理论是以集合论、拓扑学、泛函等数学理论为基础的现代统计理论。从统计学的角度对多目标状态估计的难题进行了全新的诠释,在多目标以及多传感器问题中有出色的表现,广泛应用于目标跟踪以及信息融合等领域。
近年来,基于概率假设密度滤波的算法逐渐完善,从其他的角度解决多目标跟踪的难题。通过严谨的理论推导,适用于不同的多目标跟踪状况。该算法通过随机有限集理论,对接收数据和目标的运动状态进行模型构建,避免了多目标跟踪最困难、最核心的数据关联处理。随着各种基于随机有限集理论的算法不断涌现,多目标跟踪技术必将迎来新的高度。
1.2 基于随机有限集的多目标跟踪理论
1.2.1 随机集的定义
随机集是一个集合,集合中的每一个元素都是一个集合,因此,随机集的元素及其数量都是随机的。随机集的概念是基于概率论的理论延伸,因此它的相关特性不再完全符合概率论的定义。若被跟踪目标的数量并不确定或者经常产生变化,可以把数量看作是空间维数不确定的随机变量,且随机变量是离散的。基于概率论理论的延伸,概率论研究的是概率密度函数的问题,通俗地将就是每一个点对应概率的问题[40],而随机集研究的是一个集合的概率密度函数的问题。由于加入了集值这一定义,在解决多目标跟踪的问题上取得了出其不意的效果。以下将介绍随机集理论的一些基础概念。
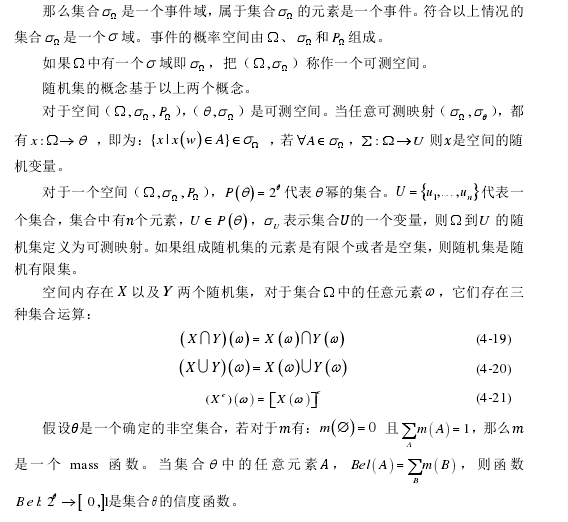
和概率密度函数相似,𝐵𝑒𝑙 函数的意义代表集合𝐴的信任值。类似的,随机集也存在概率密度函数,可以通过对 𝐵𝑒𝑙 函数求导得到。𝑃𝑙𝑠 函数代表对事件 𝐴 的最大信任值之和。事件 𝐴 发生的概率介于 𝐵𝑒𝑙(𝐴) 和 𝑃𝑙𝑠(𝐴) 之间。总的来说,多目标跟踪的核心问题就是对集合信任值和集合积分的计算。
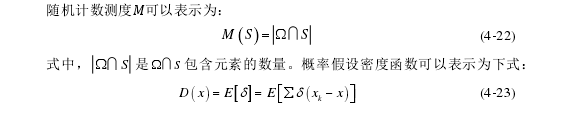
1.2.2 概率假设密度
随机有限集理论是基于一阶矩的计算,通过整个集合的矩计算来完成处理。该计算与随机变量的计算相似,但是计算的期望没有真实的意义。在多目标跟踪过程中,使用该理论的意义是将贝叶斯滤波的单目标处理和多目标处理取得相似的形式。当被跟踪目标十分密集或者数量比较庞大时,计算变得十分复杂。这时就需要使用概率假设密度理论来处理这个难题。
1.2.3 贝叶斯多目标递推模型
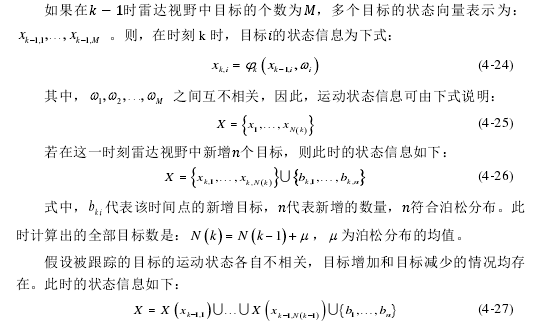
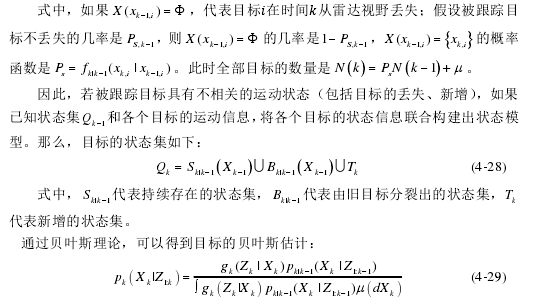
随机集理论的构建基于良好的数学统计模型,因此更擅长应对随机的目标信息。由于被跟踪目标的运动状态和接收数据都是不确定的即随机的,被跟踪目标的运动状态和运动模型就可以通过随机有限集进行构建。通过前文的分析,从接收数据中分辨数据来源于被跟踪目标还是杂波是多目标跟踪系统的核心问题,那么如何构建多目标的运动状态模型可以决定多目标跟踪的性能。以下将阐述利用随机有限集构建多目标的运动状态模型。
在实际跟踪过程中,被跟踪目标的运动状态以及变化可以概括为四种情况:
(1)若上一时刻被跟踪目标在视野中而下一时刻被跟踪目标不在视野中,即
为目标消失的情况。
(2)若被跟踪目标第一次出现在视野中,即为目标出现的情况。
(3)若被跟踪目标的运动状态符合算法采用的运动模型,即为目标运动的情况。
(4)若被跟踪目标在视野中分散成多个目标,即为目标衍生的情况。
1.3 可行性分析
多目标跟踪在复杂路况下的应用存在很多难点,实际路况中存在较强的干扰,同时当目标增多时,以前的联合概率数据关联等经典算法的计算量成指数型增长[41],并且在区分目标时困难重重,因此实际效果并不理想。现代多目标跟踪算法是在随机集理论的基础上构建的,由于不需要对采集信息进行关联处理,大大简化了运算,提高了计算速度。同时,当实际路况干扰严重时,对多目标的跟踪和区分能力也比较理想。
算法的主要步骤大体分为三个部分:
(1)取得目标回波信息,将其运动状态通过随机集的理论进行处理。
(2)计算回波信息的信任函数,通过信任函数表示出随机集的概率密度函数。
(3)将其代入贝叶斯递推方程,进行多目标跟踪。
综上所述,基于随机集理论的算法对多目标的丢失、增加、分裂等情况的处理非常理想,通过对每个目标的数据处理来表示其状态,把多目标跟踪的信息运算分解成对单目标的运算处理,绕开了传统多目标跟踪算法的数据关联环节,在处理速度和计算难度上都有领先之处。然而,随机集理论需要对集合进行积分处理,这在实际计算中具备很大的困难。对此,国外学者研究出了概率假设密度滤波算法,使随机集理论有了实际处理的可能。
1.4 概率假设密度(PHD)滤波算法
多目标 Bayes 滤波在跟踪过程中会出现大量的多重积分处理,当被跟踪目标数量增大时,计算量会出现爆发式增长,因此在实际应用中有比较大的局限性。为了减小计算量,提高算法的实时性,Mahler 提出了对 Bayes 滤波的一种近似,即为概率假设密度滤波算法。概率假设密度滤波算法处理的是后验状态,循环计算其一阶矩。复杂运算都是基于单目标的信息进行处理,因此总体计算并不复杂。
以下是概率假设密度滤波算法的前提:
(1)如果存在杂波,那么它的信息符合泊松分布,与被跟踪目标的数据不相
关。
(2)被跟踪目标之间的运动状态都是不相关的。
(3)如果存在新增目标,其状态信息符合泊松分布。
(4)计算处理后的目标状态信息符合泊松分布。
当以上假设均满足时,可以给出概率假设密度滤波算法的计算步骤:
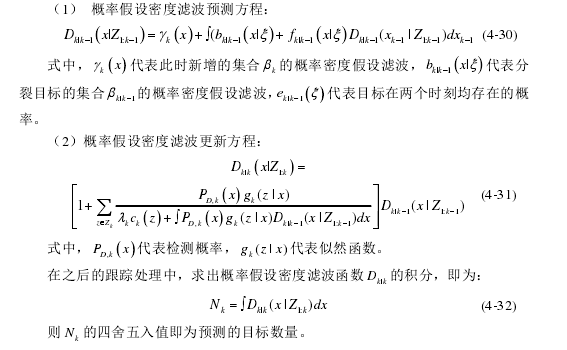
PHD 算法对多目标的递推计算量明显减小,并且由于避免了传统的数据关联问题,处理效果更佳理想。当使用该理论进行多目标跟踪时,先用 RFS 对目标的运动状态进行构建,接着借助 Bayes 理论,对目标后验特性进行递推处理,然后利用目标的状态信息来绘制目标的轨迹。
1.5 高斯混合概率假设密度(GM-PHD)滤波算法
在多目标跟踪领域,高斯混合概率假设密度滤波算法经常被人们应用,它是 PHD 算法的一个解,解是在线性情况下求得的。该算法的核心就是通过计算高斯和求得被跟踪目标的信息以及杂波信息,然后计算分布的值。
下面介绍 GM-PHD 滤波算法的大致流程:
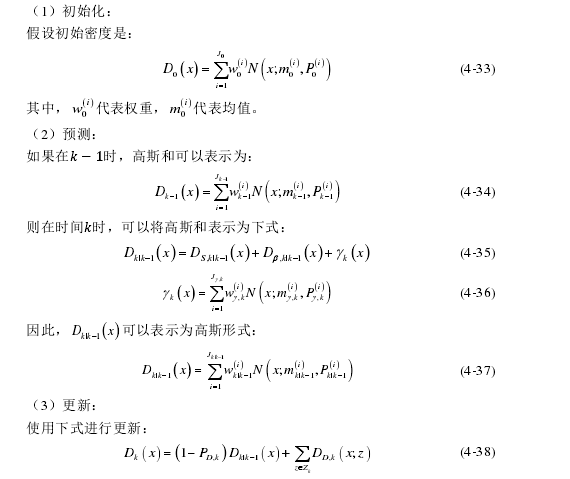
当随着处理过程的推进,递推过程中会出现越来越多的高斯项,会严重影响系统的计算速度。因此,为了对系统高斯分量进行控制,需要根据实际情况设置适当的门限,筛选所有高斯分量,去掉所有低于门限的项。同时,需要设定合理的合并策略,对具有相似分布形式的高斯分量进行统一,以提高运算速度。
GM-PHD 滤波方法的优势在于适合实际应用,并且便于计算峰值。然而,在具备诸多优点的同时牺牲了跟踪精度。当外界噪声比较强烈时,跟踪效果十分不理想,而且大大提高计算难度。因此,本文提出一种 GM-PHD 和核密度理论相结合的算法,即采取核密度估计来计算概率密度函数,避免采用传统的状态估计,使跟踪效果更加理想、计算较为简单。
1.6 GM-PHD结合核密度理论的滤波算法
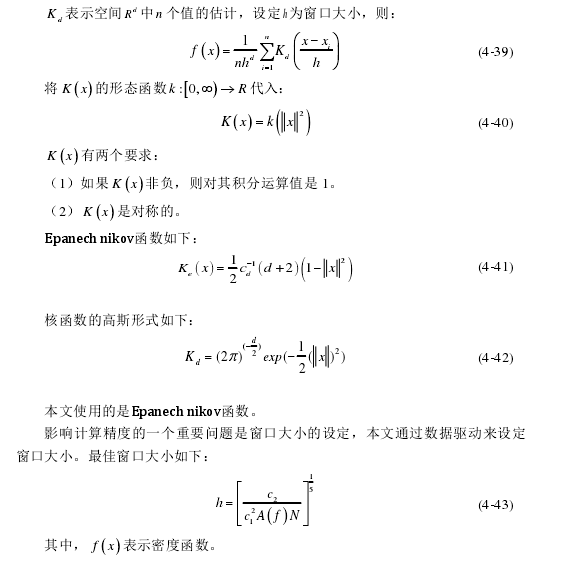
Mean -shift 算法是 1975 年由国外学者提出的,一开始并未收到人们的重视,直到后来Yizong Chen在文章中介绍了该算法的应用,人们才对这一理论进行完善并大量使用。完善内容包括:首先,给不同样本值设置不同的权重,用权重值来区分;其次,推出核函数的概念,使其表示向量的偏移值。
求解概率密度函数的极大极小值来预测目标的参数是 Mean -shift 算法最重要的部分。该算法如今在多目标跟踪领域得到了使用,对目标状态改变的情况有很好的适应性。
结合 Mean -shift 的算法步骤如下:

1.7 仿真结果
仿真了四个做直线运动的目标,杂波服从泊松分布。高斯分量最大数, OPSA 参数为 c =150 , p =0.96 。仿真结果如下图所示:
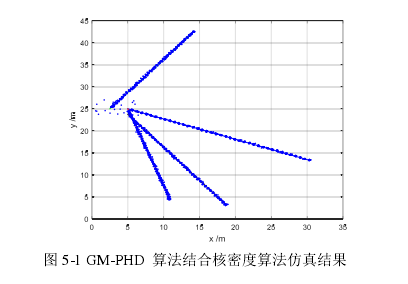
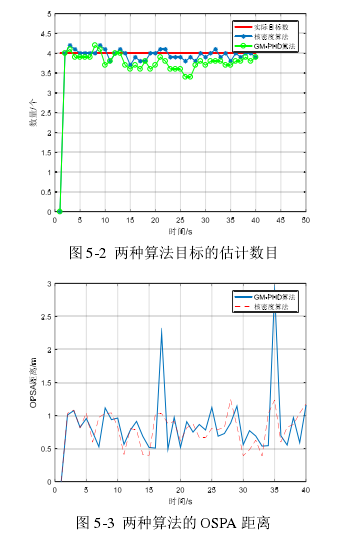
图 5-1 是目标实际轨迹和核密度理论结合 GM-PHD 算法的仿真结果,误差分析如图 5-2 和图 5-3 所示。基于有限集的概率假设密度滤波算法的评价指标主要有目标的估计数目和估计误差两项。根据结果分析,从估计目标的数目上看,GM-PHD 算法在对数据进行处理时有引起目标漏跟的趋势,即可能会产生跟丢目标的情况;在估计误差方面,GM-PHD 算法的误差极值明显高于本文提出的核密度理论与 GM-PHD 相结合的算法,本文提出的算法跟踪效果更为理想。
1.8 本章小结
本章首先讨论了基于随机有限集的多目标跟踪理论的基本概念,论证了有限集理论在实际情况中的可行性,讨论了该理论相较传统的数据关联的多目标跟踪算法的优势。然后讨论了实际应用比较广泛的 PHD 滤波算法以及 GM-PHD 算法。最后本文提出了一种基于核密度理论改进的 GM-PHD 算法,详细分析了算法的各个步骤并完成仿真。通过分析仿真结果,可以看出本文提出的算法具备更好的跟踪性能,跟踪效果比较理想。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号