
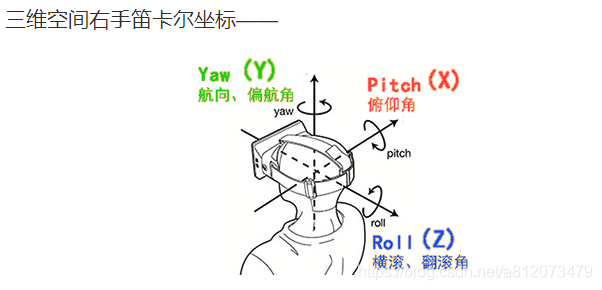
pitch、yaw、roll三个角的区别
Z轴正方向为前进方向
pitch():俯仰,将物体绕X轴旋转(localRotationX)
yaw():航向,将物体绕Y轴旋转(localRotationY)
roll():横滚,将物体绕Z轴旋转(localRotationZ)
三维空间右手笛卡尔坐标系
Z轴正方向为前进方向
pitch():俯仰,将物体绕X轴旋转(localRotationX)
yaw():航向,将物体绕Y轴旋转(localRotationY)
roll():横滚,将物体绕Z轴旋转(localRotationZ)
三维空间右手笛卡尔坐标系

 浙公网安备 33010602011771号
浙公网安备 33010602011771号