
python环境下实现OrangePi Zero寄存器访问及GPIO控制
最近入手OrangePi Zero一块,程序上需要使用板子上自带的LED灯,在网上一查,不得不说OPi的支持跟树莓派无法相比。自己摸索了一下,实现简单的GPIO控制方法,作者的Zero安装的是Armbian系统,使用python写了一个读写寄存器的简单模块,通过这个模块,即可实现对GPIO的控制。
作者以前使用过STM32的MCU,这类MCU,如果要实现对GPIO的控制,只需要根据datasheet查找相应GPIO寄存器并进行配置,即可实现IO控制,例如,要将内存地址为0x12345678的寄存器全部置为0xFFFFFFFF,只需要一条C语句:
1 (uint32 *)(0x12345678) = 0xFFFFFFFF;
但是,这个方法在Linux中行不通,编译运行的时候,会提示"segmentation fault",这个段错误应该就是访问了不可访问的内存,这个内存区要么是不存在的,要么是受到系统保护的。所以只能使用其他方法。
首先总结一下实现对OrangePi GPIO控制的两种方法,第一种是通过Linux内存映射的方式,将实际CPU硬件的内存地址映射到用户程序的内存空间,再进行操作;第二种是通过sysfs方式控制GPIO,在程序中,操作/sys/class/gpio目录实现io口的控制。
这两种方式都有现成已完成的案例,例如在python环境使用的pyH3库、C环境的WiringPi库使用的就是第一种方式;从树莓派移植的OPi.GPIO库使用的是第二种方式。其中第二种方式个人感觉更加简单,因为只需要在用户的程序里面读写系统目录的文件,即可实现对GPIO的控制,非常方便,但作者发现这种方式有个严重的问题,就是它无法使用那些板子上没引出来的IO口,因为板载的两个LED(红灯和绿灯)分别是使用了PA17和PL10引脚,如果使用第二种方式控制这两个引脚,会提示“Device or resource busy”的错误,通过以下命令:
cat /sys/kernel/debug/gpio
可以看出系统已经占用的IO口如下:
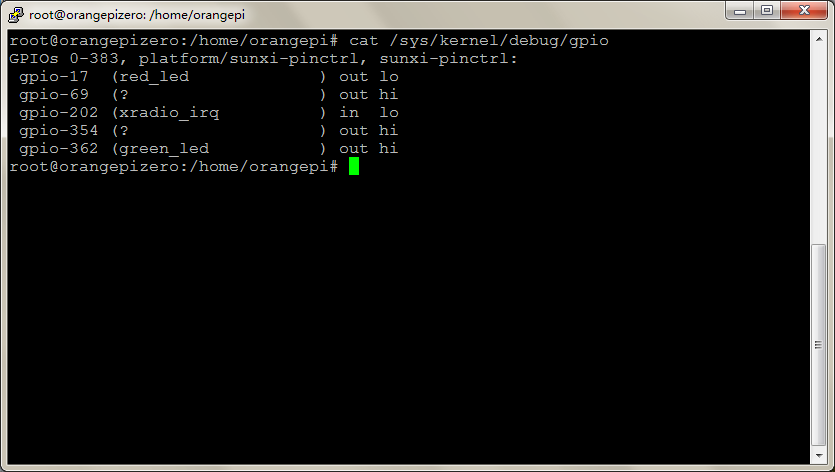
第一个GPIO17即为PA17,系统默认已经把该引脚配置为输出模式,并置为低电平。这里需要说明一下系统里对GPIO口的编号方法,系统是按照PA~PL共12组、每组32个引脚的方式对IO口进行统一编号的,如上图,GPIO-0~GPIO-31为PA口的IO,GPIO-32~GPIO-63为PB口的IO,以此类推。所以上图最后一行GPIO-362实际就是PL10引脚,即电源的绿灯引脚。
回归本文,因为第二种方法无法操作PA17,所以只能使用第一种方法。
第一种方法已经有现成的实现,通过深入研究库源码,内部实际都是通过C的mmap函数来实现CPU的物理地址映射到用户程序的内存空间。作者习惯使用Pyhon在Linux环境下进行程序开发,pyH3库使用感觉比较繁琐。所以特意研究了一下能否在python环境下实现物理地址的映射。实际果然不出所料,C里有mmap函数,python里同样有内置的mmap模块。说明文档在这里:https://docs.python.org/2/library/mmap.html
其中最重要的就是mmap类的构造函数:
class mmap.mmap(fileno, length[, flags[, prot[, access[, offset]]]])
fileno: 文件描述符,可以是file对象的fileno()方法,或者来自os.open(),在调用mmap()之前打开文件,不再需要文件时要关闭。
length:要映射文件部分的大小(以字节为单位),这个值为0,则映射整个文件,如果大小大于文件当前大小,则扩展这个文件。
flags:MAP_PRIVATE:这段内存映射只有本进程可用;mmap.MAP_SHARED:将内存映射和其他进程共享,所有映射了同一文件的进程,都能够看到其中一个所做的更改;
prot:mmap.PROT_READ, mmap.PROT_WRITE 和 mmap.PROT_WRITE | mmap.PROT_READ。最后一者的含义是同时可读可写。
access:在mmap中有可选参数access的值有
ACCESS_READ:读访问。
ACCESS_WRITE:写访问,默认。
ACCESS_COPY:拷贝访问,不会把更改写入到文件,使用flush把更改写到
fileno参数需要指定为系统“/dev/mem”的文件描述符,可以通过open()函数和fileno()方法得到,flags、prot、access参数指定为读写访问即可。
length和offset参数比较重要,首先是offset参数,这个参数指示从哪个内存地址开始映射,注意,这个数值必须是页大小的整数倍,在OrangePi Zero中,页大小为4096字节。根据datasheet,GPIO的内存地址是从0x01C200800开始,但这个值并不是页大小的整数倍,所以只能往前截取,最近一个页大小整数倍的地址是0x01C200000,offset就是要设置为这个值。

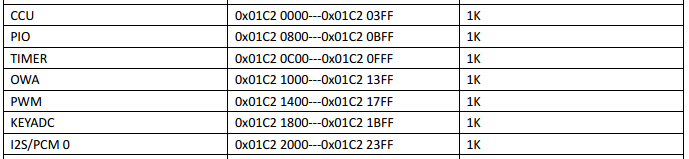
那还有0x0800的偏移量怎么办呢,这个就通过length参数来设定了,length参数指定了从这个offset开始,映射多少字节的物理内存到用户程序的内存空间,显然,这个length必须足够长把整个gpio模块的寄存器地址全部映射了,才能在用户程序里正常访问GPIO寄存器,这里设置为两个页大小,即8192字节(0x01C20000 ~ 0x01C21FFF),从datasheet看,这个地址空间包含了CCU、PIO、TIMER、OWA、PWM、KEYADC模块的所有寄存器。
映射之后,可以得到一个mmap类的对象,使用这个对象,我们可以像操作文件一样对寄存器进行读写操作。在以下模块的代码中,实现了两个方法:读寄存器和写寄存器。注意在操作寄存器的过程中,有一点必须注意,每次读写寄存器必须四字节对齐,即一次读取或写入4个字节(所有寄存器都是32位),读写的寄存器地址也必须是4的倍数,否则会操作失败,板子会死机。
import mmap import struct class GPIO: #-------------------------------------------------------------------------------------# #定义GPIO相对0x01C20000的偏移地址 PIO_ADDR_OFFSET = 0x0800 #定义GPIOA的寄存器相对0x01C20000的偏移地址 #作者只写了GPIOA的寄存器定义,如果需要使用其他IO,请参考datasheet在下面增加定义 PIO_PA_CFG0_REG = PIO_ADDR_OFFSET + 0x00 PIO_PA_CFG1_REG = PIO_ADDR_OFFSET + 0x04 PIO_PA_CFG2_REG = PIO_ADDR_OFFSET + 0x08 PIO_PA_CFG3_REG = PIO_ADDR_OFFSET + 0x0C PIO_PA_DATA_REG = PIO_ADDR_OFFSET + 0x10 PIO_PA_DRV0_REG = PIO_ADDR_OFFSET + 0x14 PIO_PA_DRV1_REG = PIO_ADDR_OFFSET + 0x18 PIO_PA_PUL0_REG = PIO_ADDR_OFFSET + 0x1C PIO_PA_PUL1_REG = PIO_ADDR_OFFSET + 0x20 #-------------------------------------------------------------------------------------# #以下是构造函数和析构函数 def __init__(self): self.m_mmap = None self.fd = None def __del__(self): if(self.m_mmap != None): self.m_mmap.close() if(self.fd != None): self.fd.close() #-------------------------------------------------------------------------------------# #以下是成员函数 def Init(self): """ GPIO初始化函数 函数会打开/dev/mem文件,并映射从0x01C20000地址开始,共8192字节长度(2页)的内存空间到用户的虚拟地址 返回值:无 """ START_ADDR = 0x01C20000 self.fd = open("/dev/mem", "rb+") self.m_mmap = mmap.mmap(self.fd.fileno(), 4096 * 2, mmap.MAP_SHARED, mmap.PROT_WRITE | mmap.PROT_READ, mmap.ACCESS_WRITE, START_ADDR) assert self.m_mmap != None,"Init Fails" def ReadReg(self,reg_addr): """ 读取一个寄存器的值 reg_addr:要读取的寄存器地址(必须为4的倍数),且范围在2个pagesize内,即小于8192 返回值:寄存器的值(4字节) """ assert self.m_mmap != None,"Init Fails" assert reg_addr%4 == 0,"reg_addr must be mutiple of 4" assert 0<=reg_addr<=8192,"reg_addr must be less than 8192,which is 2 pagesize" self.m_mmap.seek(reg_addr) ReadBytes = self.m_mmap.read(4) return struct.unpack('L',ReadBytes)[0] def WriteReg(self,reg_addr,value): """ 写一个寄存器的值 reg_addr:要写入的寄存器地址(必须为4的倍数),且范围在2个pagesize内,即小于8192 value:要写入的值,整形,一次写入四个字节长度的整数,即0xffffffff 返回值:无 """ assert self.m_mmap != None,"Init Fails" assert reg_addr%4 == 0,"reg_addr must be mutiple of 4" assert 0<=reg_addr<=8192,"reg_addr must be less than 8192,which is 2 pagesize" assert 0<=value<=0xFFFFFFFF,"value must be less than 0xFFFFFFFF,which is 4 bytes" self.m_mmap.seek(reg_addr) BytesToWrite = struct.pack('L',value) self.m_mmap.write(BytesToWrite) return
要使用这个模块,只需要把这个模块的py文件放在用户程序同一个目录下,直接导入即可,以下是令PA17(红色LED)闪烁的范例。
说明:
1、OPiZero_GPIO是上面定义的模块的文件名,直接导入使用即可。
2、PIO_PA_CFG2_REG寄存器的第4~第7位为Pin17的模式配置,配置为001即输出模式
3、PIO_PA_DATA_REG寄存器的第17位为Pin17的高底电平输出控制,这里采用了一个巧妙的方法,读取PIO_PA_DATA_REG的值与0x00020000按位异或即可实现第17位的取反。
4、切勿直接往寄存器里写入数据,因为PA口有很多IO用作板子内部使用,直接写入的话很容易导致其他IO口逻辑输出错误,导致板子死机,作者已亲身体验n次,务必使用读-修改-写的模式修改寄存器的值。
import OPiZero_GPIO import time #以下为主程序 GPIO = OPiZero_GPIO.GPIO() GPIO.Init(); #PA17配置为输出模式 GPIO.WriteReg(GPIO.PIO_PA_CFG2_REG,GPIO.ReadReg(GPIO.PIO_PA_CFG2_REG) | 0x00000010) while(1): GPIO.WriteReg(GPIO.PIO_PA_DATA_REG,GPIO.ReadReg(GPIO.PIO_PA_DATA_REG) ^ 0x00020000) time.sleep(0.3)
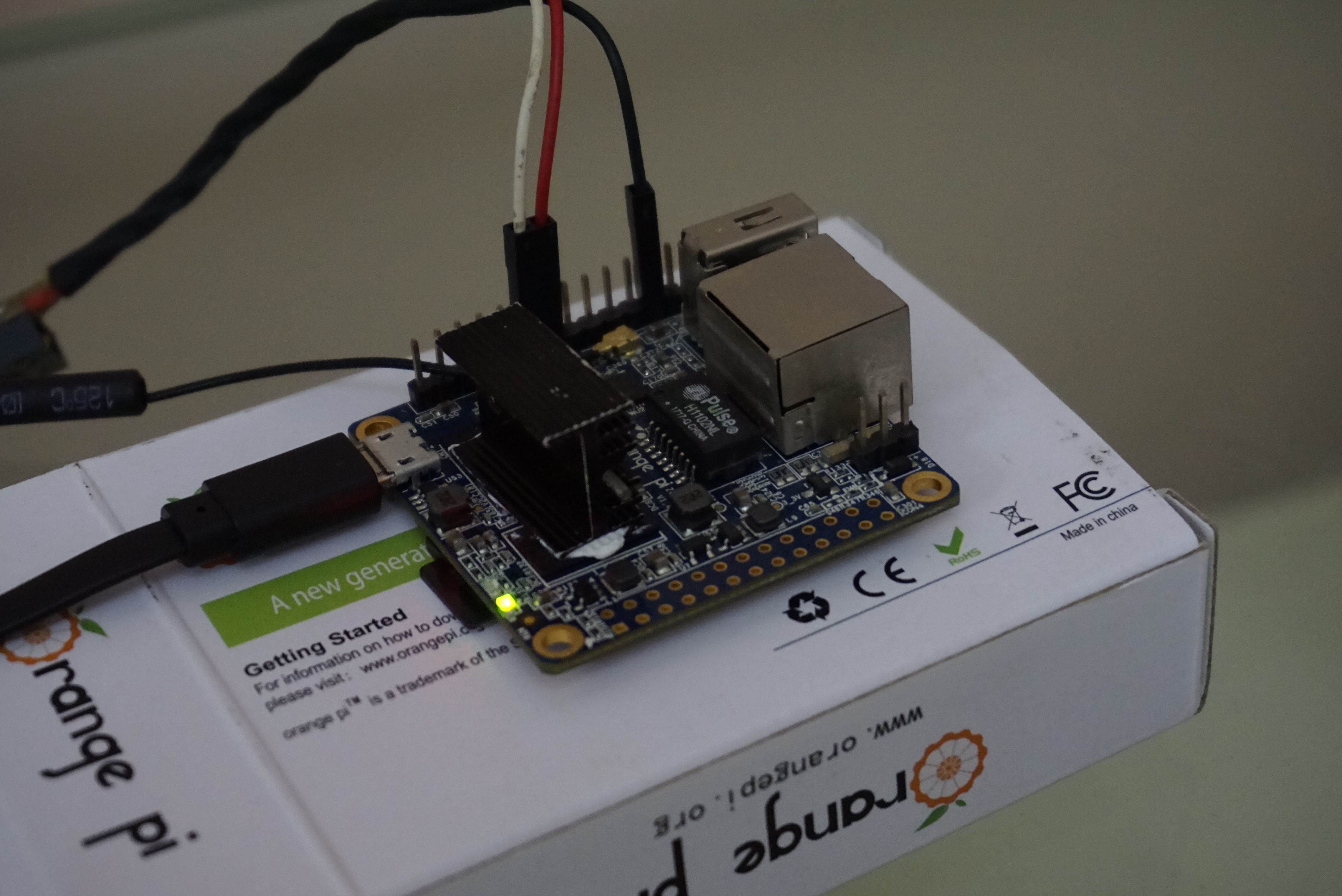
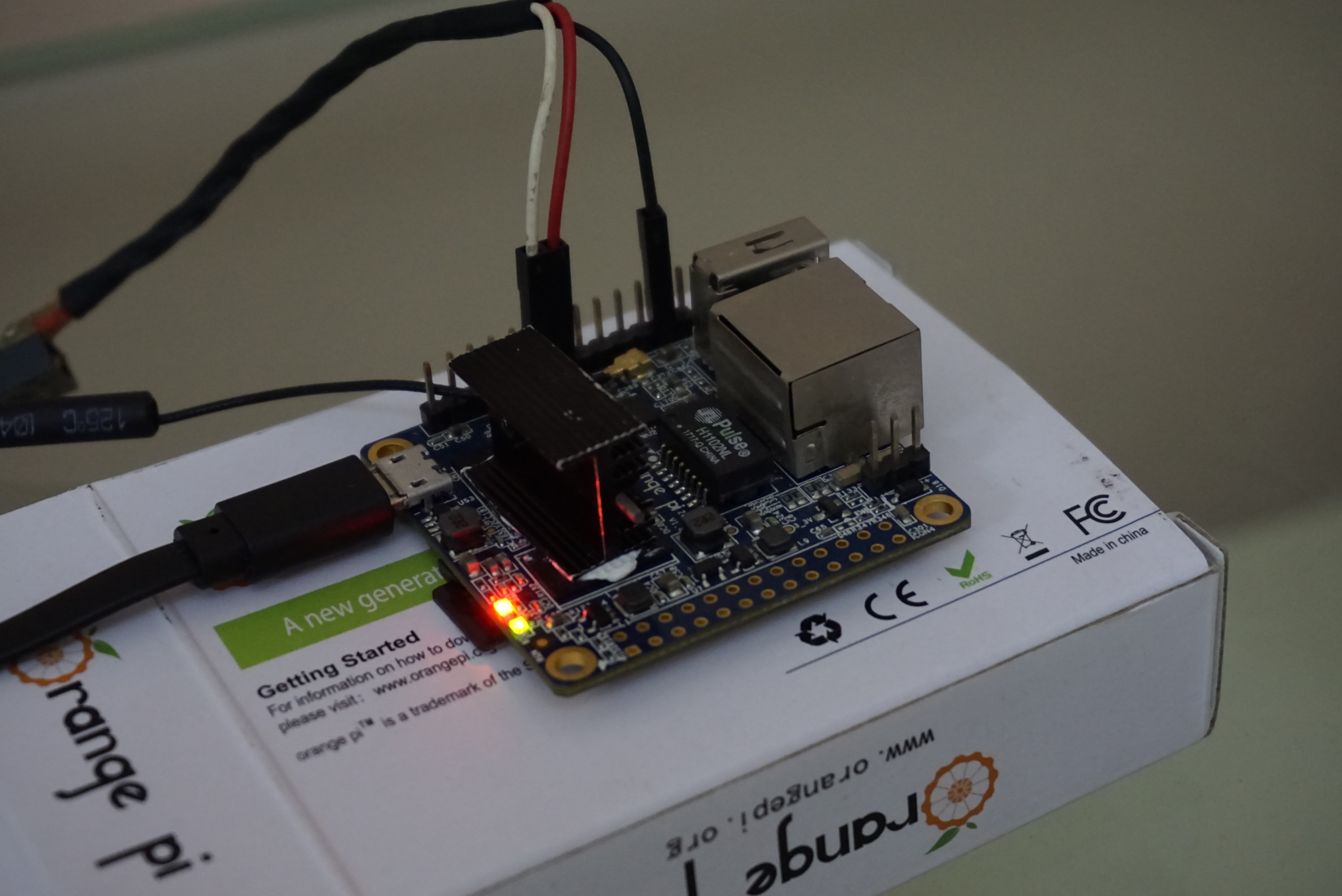
实际效果如下:
最后把源码附上:
https://files.cnblogs.com/files/qzrzq1/OPiZero_GPIO.zip
https://pan.baidu.com/s/1yiely1q_4LPZ4Bs8gyKDGg


 浙公网安备 33010602011771号
浙公网安备 33010602011771号