

[ros]1.Ubuntu配置(虚拟机)和常用命令
本学习笔记基于B站ROS公开课:【古月居】古月·ROS入门21讲
基于:Ubuntu 18.4、Melodic(ROS系统)、虚拟机软件 VMware WorkStation Pro 17 。
本学习笔记将课程中所有的程序在以上系统中验证并运行成功。
1.更换国内源
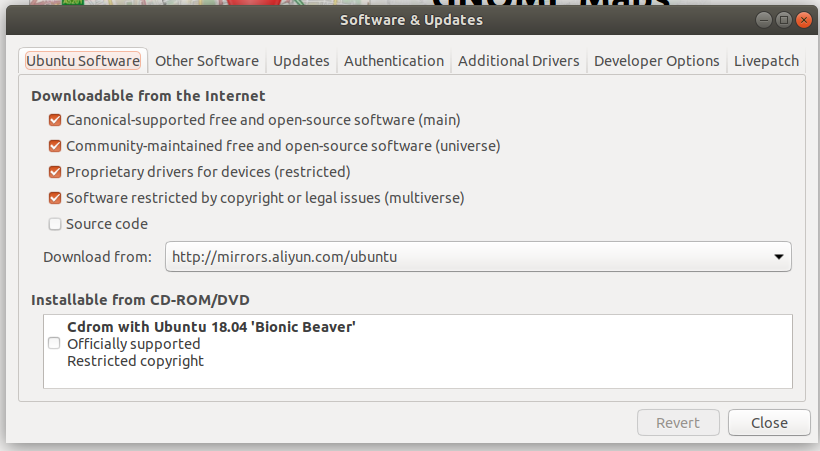
打开Ubuntu Softwear,打开软件更新,同时勾选所有四个选项以及更换源至国内阿里云,(有很多可以选择,如果连的校园网可以选择后缀为.edu的镜像)
为什么换源:
我们平时有在其他国家地区下载或访问的需求,但是因为DNS污染或者网络节点太多导致网速慢和不稳定等情况。为了解决这种情况,镜像站诞生了,镜像站就是在国内搭建一个平台,并且同步源目标站的数据信息,以此解决访问缓慢的问题。
2.linux基本操作
相比于windows的一点到底的操作,linux的终端操作更为广泛,这段时间使用下来在新建文件和编译上效率相比点击和选择要高效很多。
Ctrl+Alt+T打开终端
su和sudo命令的区别
一般初次进入终端都没有设置root密码,设置方式如下:
进入终端输入 sudo passwd root 即可用su 命令切换到root
关于深入理解root和普通用户,su和sudo的区别参见此文
简单说来root属于最顶层的管理员,可以操作此系统的一切(近似,有可能因为不当的操作导致系统崩溃),因此在日常使用中对用户权限做了限制,只在需要高级权限时打开root,但是与此同时带来一个问题是同一计算机可能有多位管理员(如果root密码发生变化要多次通知),因此引入sudo 命令,即零时借用root权力(如同拿起雷神之锤暂时获得了雷神的能力),sudo命令的好处在于不需要root管理员的密码,只需要管理员自己的密码,而且在未给root用户设置密码时无法进入root模式,进一步保障系统安全。
其他基本操作
pwd显示 目前文件目录
cd+目录名 进入指定目录
cd.. 返回上一级目录
mkdir 新建文件夹 对进入root模式后建立的文件夹
ls 查看当前目录下所有文件
touch 创建文件,后面要加.以及文件类型
mv 文件名/目标目录 移动文件至目标目录
cp 目标目录/文件名 复制文件
rm 文件名 删除文件
rm -r 目录名 删除目录 -r在这里起循环作用
所有指令后加 --help 获取有关此指令的帮助
3.ROS安装
ros每一版本都有与之相对应的推荐ubuntu版本,因此需要查看操作系统版本以及ros发行版

添加ros软件源
因为下载ros后ros自身会从其他网站获取更新及文件,因此需要进行换源操作。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
安装ros
这一步是更新和下载安装,如果失败则尝试更换热点
sudo apt update
sudo apt install ros-melodic-desktop-full
ros依赖初始化
我在这一步发生了多次初始化失败,怀疑是因为无法FQ,更改了虚拟机的网络链接方式,但仍然初始化失败,于是采用了一个国内的镜像源
参照本文 https://blog.csdn.net/sinat_16643223/article/details/120950026
sudo rosdep init
rosdep update
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
除此之外还需要在根目录中设置bash文件
在linunx中,先需要source一下bash文件来运行脚本。
在这里,我们需要运行这个bash文件才能让系统加载ros,所以需要运行source /opt/ros/noetic/setup.bash来加载ros。
但是每次加载很麻烦,所以配置一个环境变量,让终端每次启动都能加载这个bash,如何实现呢?在用户根目录下,有个隐藏文件:.bashrc。
打开用户根目录,按Ctrl+H可显示隐藏文件,就可以打开.bashrc了。
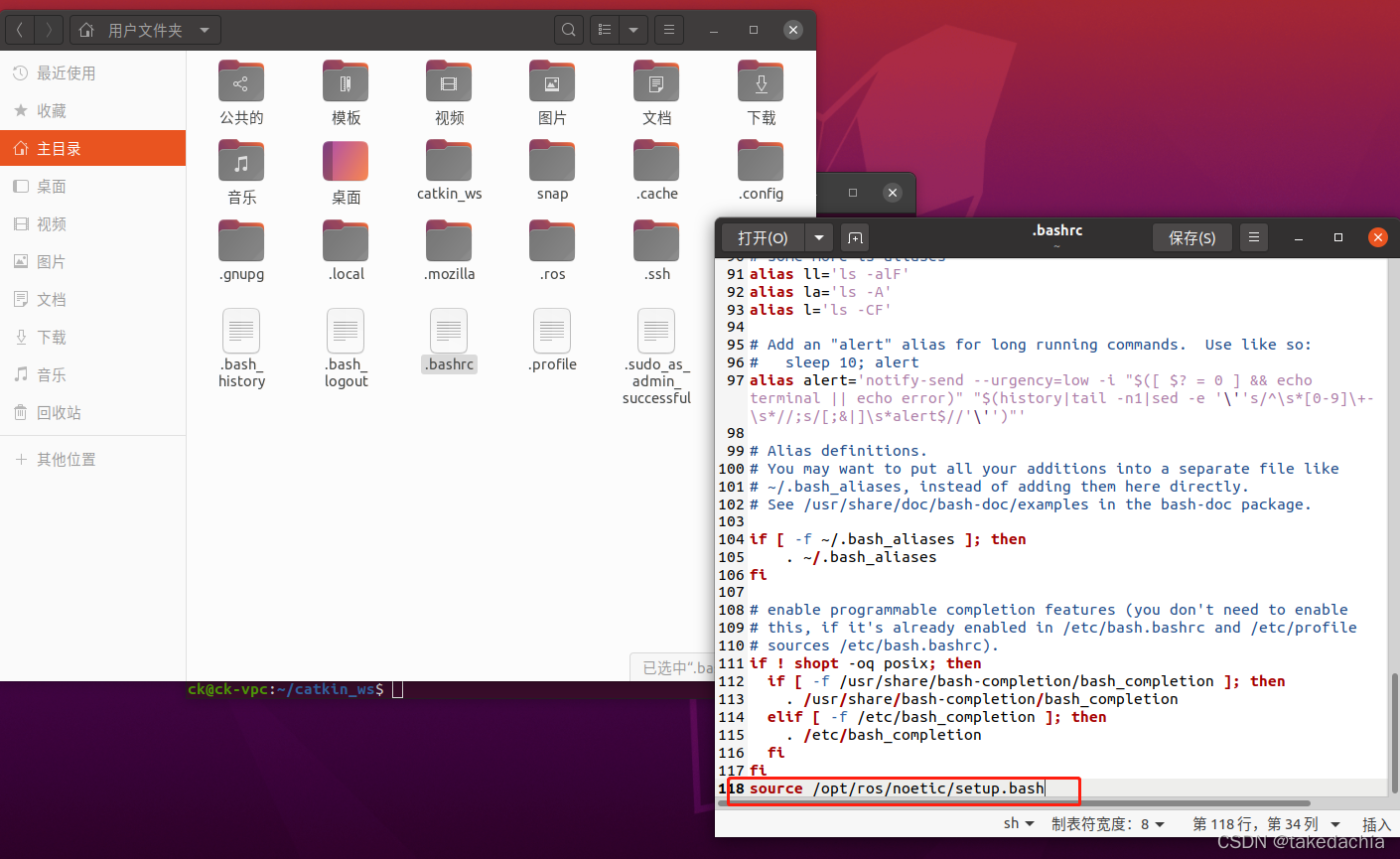
我们可以看到这句话已经加在了文件的末尾。
而上面echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc这句话的作用就是指将source /opt/ros/noetic/setup.bash添加到环境变量文件.bashrc中。
启动仿真器验证
在终端输入roscore启动ROS Master,如果显示版本号和一长串文字,则安装成功。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 零经验选手,Compose 一天开发一款小游戏!
· 一起来玩mcp_server_sqlite,让AI帮你做增删改查!!