群论第五章转动群(2)老师说伴随表示要求学会
第章
1.3节 SU(2)群的不等价不可约表示
1.欧拉角 见北大群论书+此笔记。此笔记中有些内容北大群论书没有。但北大群论书也写得好,必须学
1)
2) 群的元素
3)欧拉角的两种含义:
4)欧拉角参数化和参数化之间的关系:
2.SU(2)群的不可约表示
下面求2个重要的表示矩阵:
a.绕 轴转动 角元素的表示矩阵
b.绕 轴转动 角元素的表示矩阵
SU(2)群的不可约表示及其性质
性质:
3.SO(3)群的不可约表示
4.O(3)群的不可约表示
1.4节 李氏定理
4.伴随表示
1)伴随表示的生成元
2)求伴随表示
3)微量微分算符
a.重要公式
b.这个公式在物理上的应用:
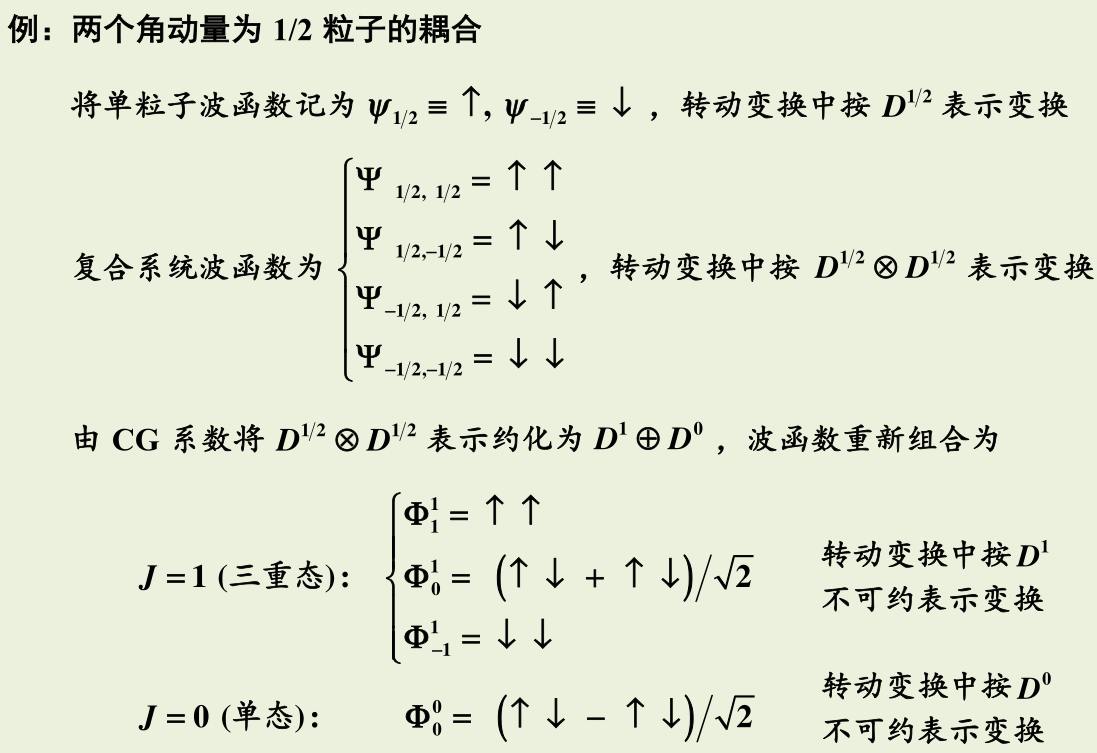
1.5节 SU(2)群直乘表示的约化 没时间,和CG系数有关,以后需要的时候再学吧
1.7节 物理应用
1.球谐函数:是荷载这个 群不可约表示 的基
1.3节 SU(2)群的不等价不可约表示
此节内容见北大群论书+此笔记。此笔记中有些内容北大群论书没有。但北大群论书也写得好,必须学
1.欧拉角 见北大群论书+此笔记。此笔记中有些内容北大群论书没有。但北大群论书也写得好,必须学
1)
- 用参数 描写 群的元素
优点:几何意义清楚, 它代表矢量绕 方向转动 角的变换
群空间恒元的邻域内,参数与群元素一一对应
缺点: 由 矩阵的具体形式确定这组参数较麻烦;由动坐标系 相对定坐标系 的位置确定转动参数较困难
应用:常用于理论研究 - 用欧拉角 描写 群的元素
优,点: 群的任意元素可表示为三个绕坐标轴转动的乘积
由绕坐标轴转动元素的表示矩阵可确定任意元素的表示矩阵原因见北大群论书196至198页求出 群的元素 的过程,就可以知道。
缺点:群空间恒元的邻域内,参数与群元素多一对应
应用:常用于实际计算,计算时求欧拉角的方法:见作业题
2) 群的元素
根据北大群论书196至198页求出 群的元素 的过程,得到
![]()
![]()
 (60)
(60)

这个参数范围与北大群论书不同。以北大群论书为准。
- 根据北大群论书196页图5和(60)知道,当 时 是绕 轴转动 角的变换 , 相同的操作对应的是同一个SO(3)群中的元素, 和 中只有一个是独立的 在恒元附近(根据(6)知道,当很小时,对应的R是恒元附近的一个R), 欧拉角参数与群元素是多一对应的
在 邻近也有类似的多一对应关系(只能确定 , 这是欧拉角参数的缺点
北大书说,在一些特殊情况下,多种欧拉角的组合对应同一个转动,不过我们写成SO(3)群矩阵表示(60)时,这种多种组合的表示又会归一到同一个矩阵表示。
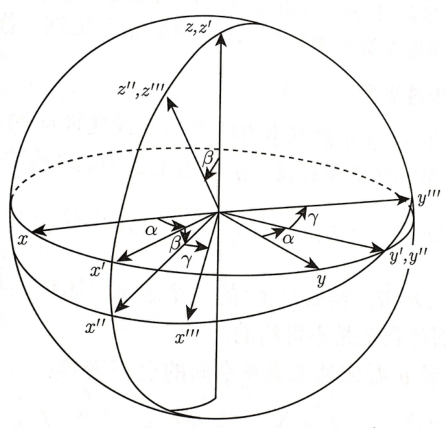
3)欧拉角的两种含义:
三维转动变换R可分解为绕定坐标系的坐标轴的三个转动的乘积(一个矢量先绕定坐标轴z轴转,再绕定坐标轴y轴转,最后绕定坐标轴z轴转),也可分解为绕动坐标系的坐标轴的三个转动的乘积(见北大群论书),二者乘积次序正好相反(背):
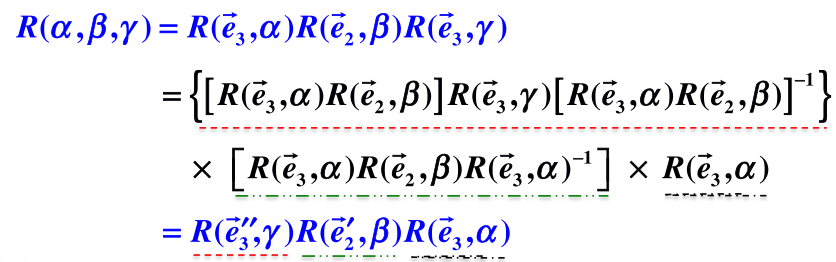
![]() 这个分解的原因见北大群论198页R的表达式的上一行。
这个分解的原因见北大群论198页R的表达式的上一行。
4)欧拉角参数化和参数化之间的关系:
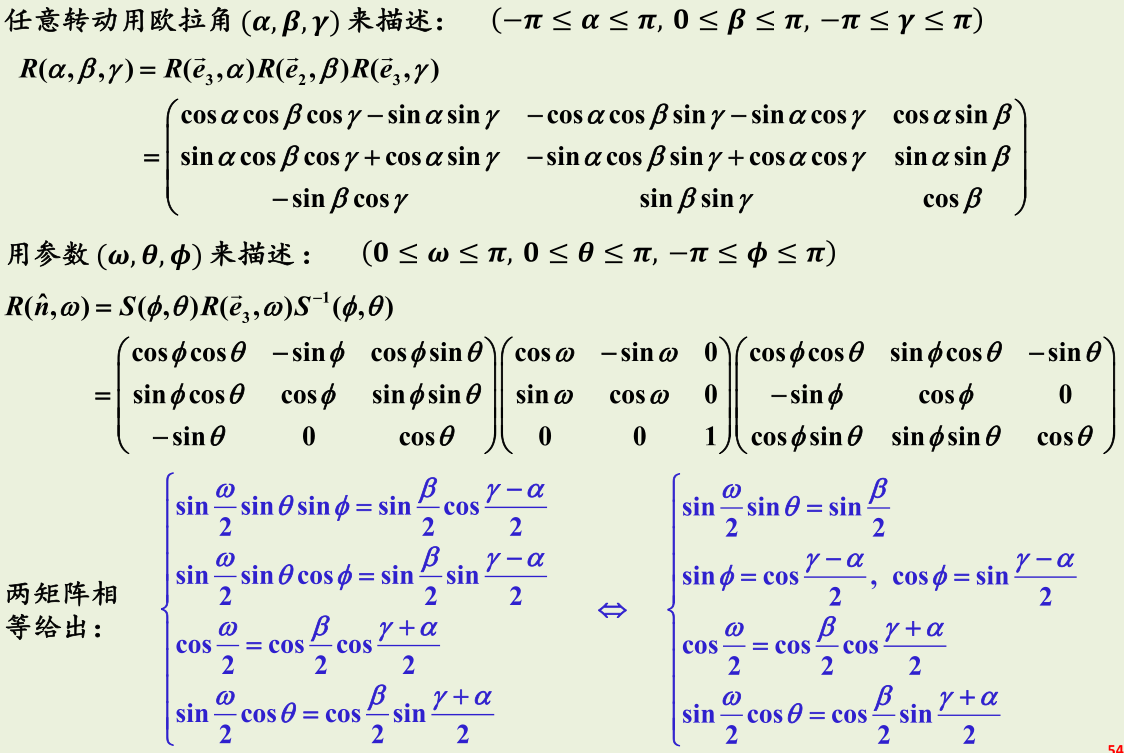
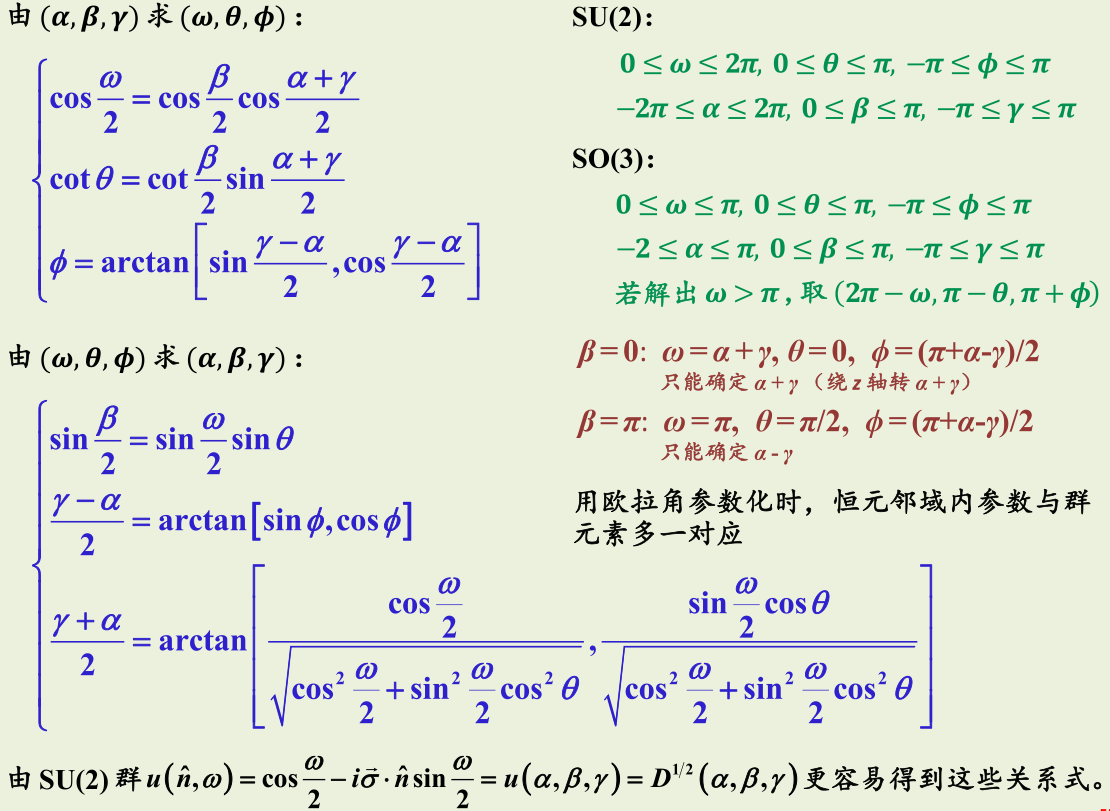
C语言中arctan是有两个参数的。才能确定值。
下面会讲,SU(2)群的自身表示就是SU(2)群的![]() 表示。
表示。
2.SU(2)群的不可约表示
以前第二章讲的等其实都是SO(3)的子群,等的表示我们已经在第三章清楚了。
- 将SU(2)群的元素u看作二维复向量空间的幺正变换(这是因为u是幺正的,故称为幺正变换)

的 次齐次函数构成的 维函数空间是 的不变函数空间,这个就是表示空间。
比如第三章讲了,这三个n=2的二次函数一定构成一个3维不变函数空间,根据
 可以知道是一个3维不变函数空间。
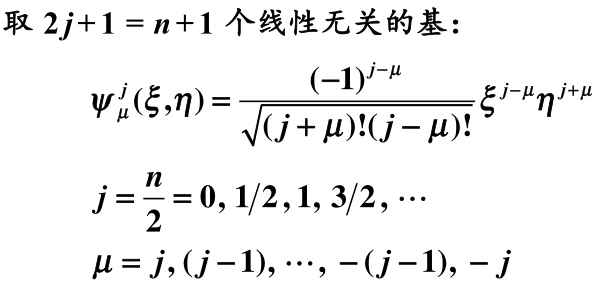
可以知道是一个3维不变函数空间。 - 取n+1个线性无关的基为:
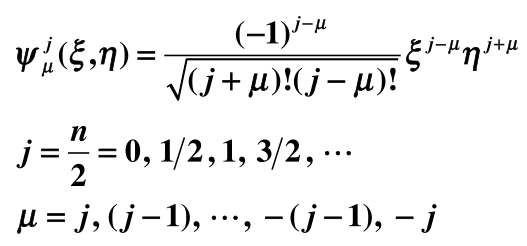
这样取基是为了使得求出来的表示是幺正的。
根据此基的表达式可以知道,这是 的 次齐次函数,即
j和的物理意义见北大群论204页。写得好。而这个ppt没写。
j的意义:j标记一个表示空间,一个j对应一个表示空间,它是一个函数空间。也即一个j对应一个表示。
的意义:对一个特定的j,即对一个表示空间,有不同的基,这些基用来标记,根据上面的公式知道,一共有个基,即维的函数空间。(n+1维的函数空间)
- 根据第三章知道,求表示的方法:

:与 对应的函数变换算符
下面求2个重要的表示矩阵:
a.绕 轴转动 角元素的表示矩阵


![]()
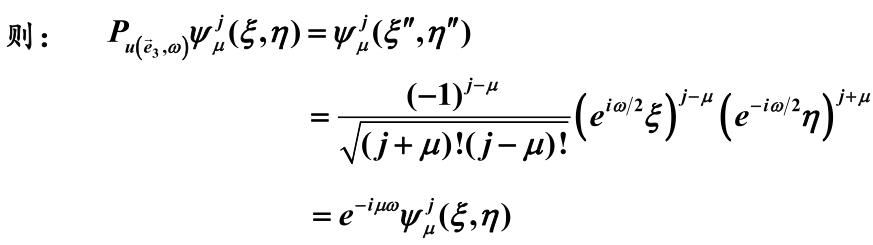
这就得到了表示矩阵的矩阵元:
![]()
从此可以知道,表示矩阵是对角的。
原因见北大群论书205页
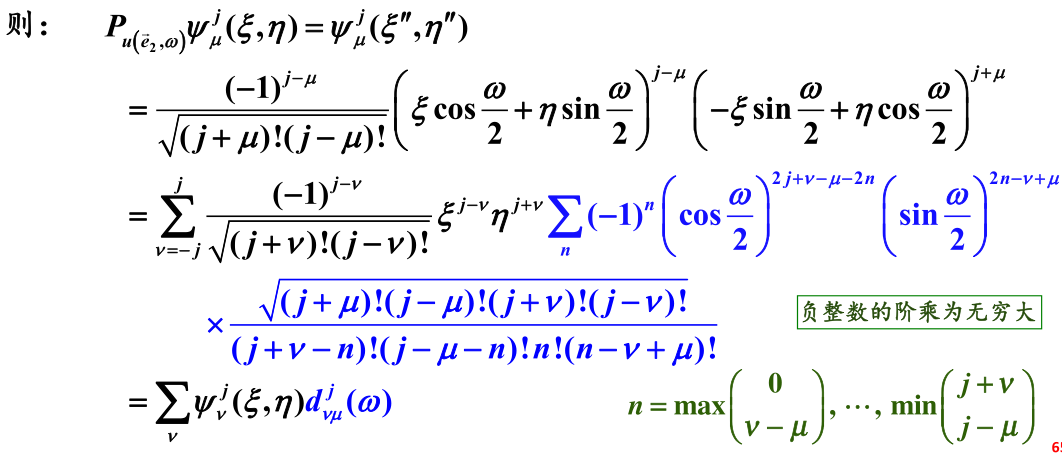
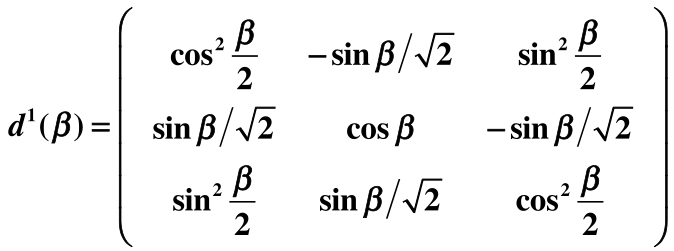
b.绕 轴转动 角元素的表示矩阵
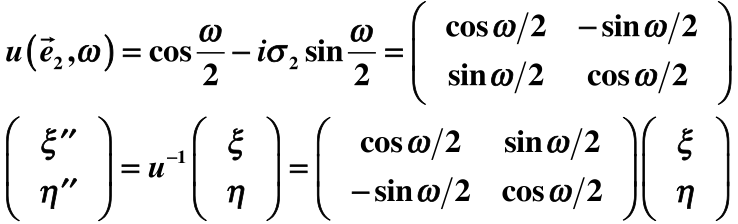
![]()
![]()
![]()
这就得到了这个元素对应的表示矩阵的矩阵元:![]() (具体表达式和参数n的范围见北大群论书,ppt没有说清楚)
(具体表达式和参数n的范围见北大群论书,ppt没有说清楚)
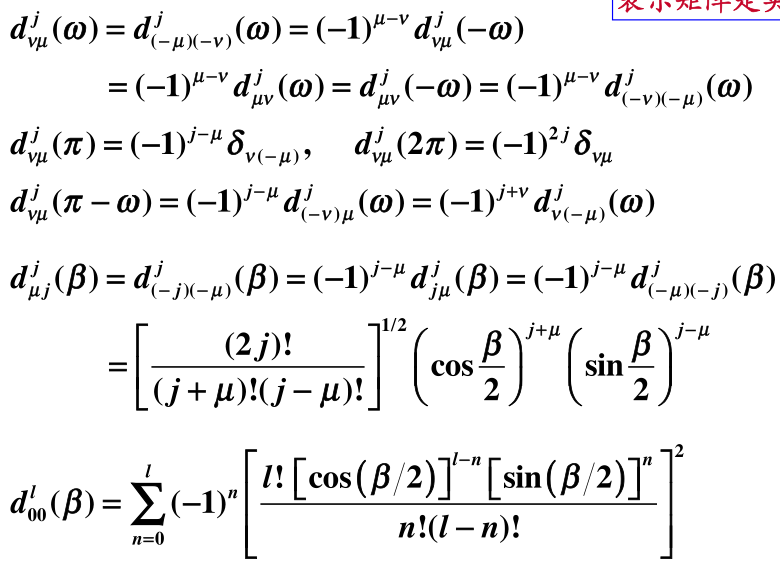
这里的![]() 其实就是高量中角动量理论中的d矩阵。注意这个矩阵是实正交矩阵。
其实就是高量中角动量理论中的d矩阵。注意这个矩阵是实正交矩阵。
得到的过程见北大群论206、207页。

- 几个特殊的
 矩阵
矩阵
这个实际上就和SU(2)群中绕y轴转的元素u
注意这里,行、列指标按 的次序排列,例如
SU(2)群的不可约表示及其性质
完整的一个SU(2)群中的元素u所对应的表示空间中的表示矩阵的矩阵元为:(背)
![]()
![]() (65)
(65)
证明见北大群论书,写得更好
性质:
- 注意这里在矩阵中,行、列指标按 的次序排列。故知, 是 维表示
这是因为前面已经说了,,其中n是整数,故j取以上的值。
- 可以证明, 是实正交矩阵, 是幺正表示
老师没说怎么证明
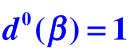
- 时,表示空间是一维的,表示是一维恒等表示:
原因见北大群论208页
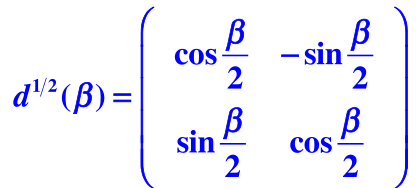
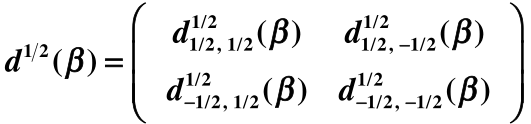
- 时,表示空间是二维的,表示是SU(2)群的自身表示:
 =
=
原因见北大群论208页
- 时,表示空间是三维的,表示等价于SO(3)群的自身表示
根据北大群论书中的方法,根据(65)可以求出表示(其实基也可以根据204页基的表达式求出来)
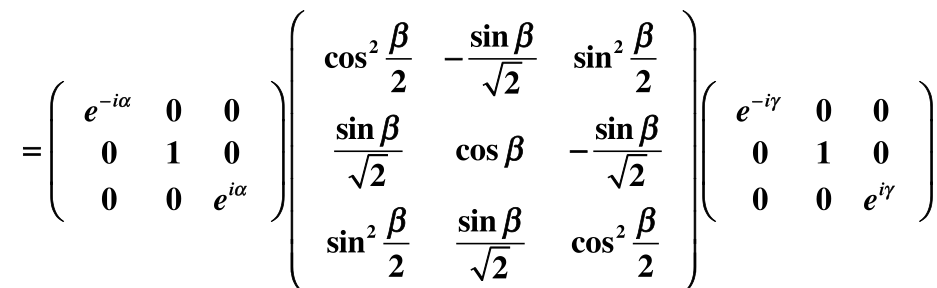 =......
=......
可以证明:存在相似变换矩阵M: ,使得
,使得 ,即知道,表示等价于SO(3)群的自身表示。
,即知道,表示等价于SO(3)群的自身表示。 - 其他j的情况也可以类似求出来。
- 转相同角度的元素构成一类,即SU(2)群中元素的都相同的元素构成一类。由绕 轴转 角元素的表示矩阵得转角为 的类在 表示的特征标为
 (68)
(68)
当j=1/2时, ,这不奇怪,因为SU(2)群自身表示的特征标可以求出就是
,这不奇怪,因为SU(2)群自身表示的特征标可以求出就是 。当j=1时,
。当j=1时, 。
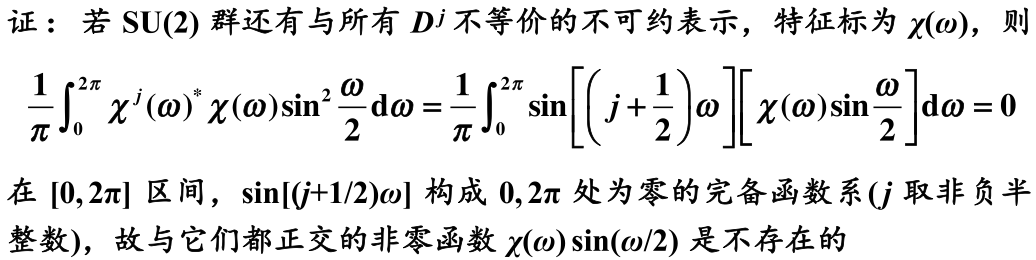
。 - 对紧致李群,特征标的模方对群参数的带权积分等于1,则它就是不可约表示。这里求出的特征标公式(68)满足SU(2)群的不等价不可约表示特征标的正交关系:

故:不同 的表示 是 SU(2) 群的不等价不可约表示 - 不同 的表示 构成了 SU(2) 群的所有不等价不可约表示
证明没时间,算了。
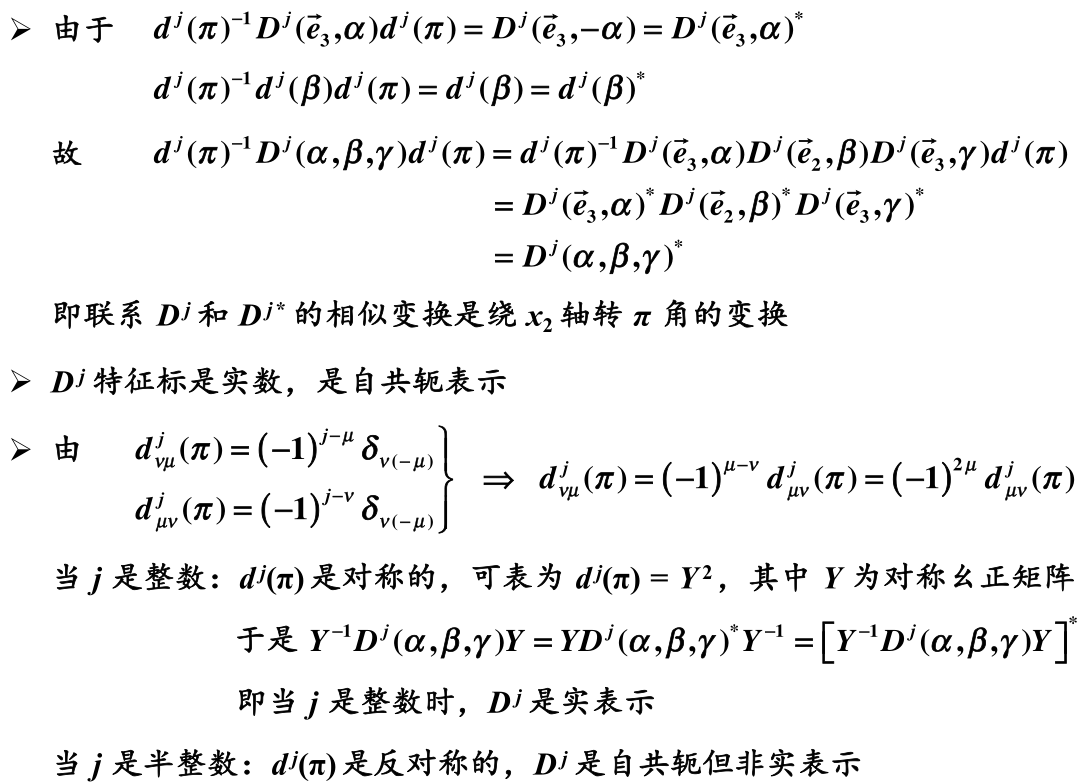
- 当 为半整数时 , 可以证明 ,故是 群的真实表示 。也即,当j为半整数时,表示为奇表示。(见北大群论208)
当 为整数时 , 可以证明,故 是 群的非真实表示。也即,当j为整数时,表示为偶表示。
以上公式的证明见北大群论207、208页。老师也讲了一个证明,见课,没时间,算了。
 ,一对多,G中的元素更多。确实,以上结论得证。
,一对多,G中的元素更多。确实,以上结论得证。 - 群不可约表示的生成元
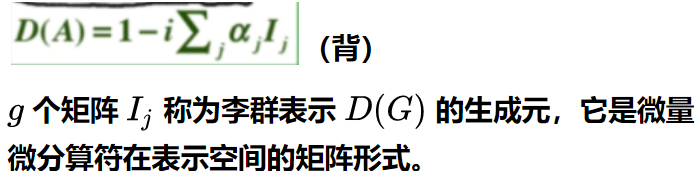
复习表示的生成元:
因为我们已经知道不可约表示矩阵(65),故根据这个公式,可以求出不可约表示的3个生成元。但是ppt上选择的三个参数对应的生成元并不是欧拉角分解为绕动坐标轴转动的三个参数,也不是的球坐标,而是和欧拉角的另一个含义有关的三个参数,即前面讲类似欧拉角时所说的绕定坐标轴的三个转动的参数。
SU(2)的元素u也可以分解为绕定坐标轴的三个转动的乘积,参数为。能这样分解是因为北大群论书205页u表达式的第二行。这里的就是所选择的参数,其对应的生成元为:
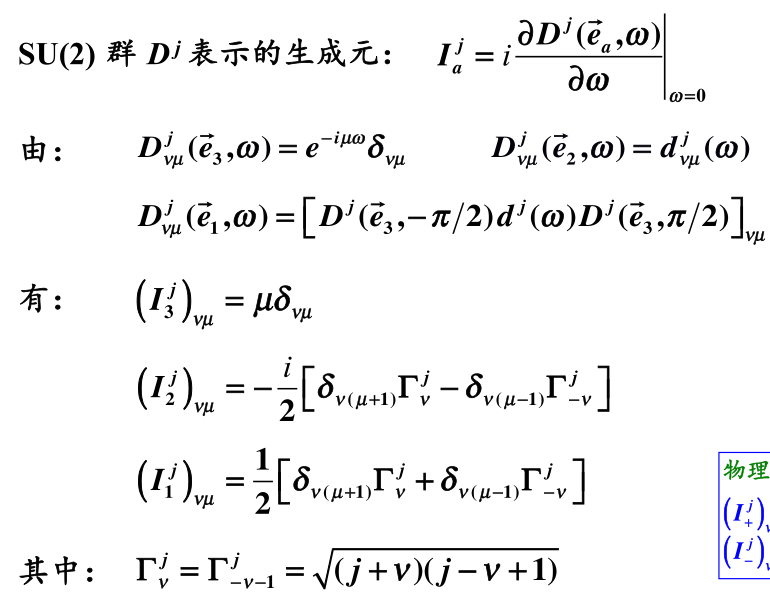
这些公式和马书不同,可能老师打错字了?
根据北大群论205至207页就可以理解三个生成元确实是这样求出来。我理解了。
以前讲SO(3)与SU(2)的同态关系SU(2)的参数也取为SO(3)的.
- 还有自共轭、实表示的内容,算了。见ppt,可能没用。
3.SO(3)群的不可约表示
- 群 1: 2 同态于 群 , 群的不可约表示一定也是 群的不可约表示
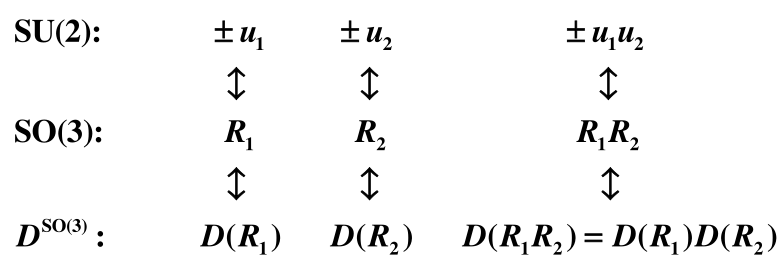
根据线性表示的定义“定义: 若行列式不为零 的 矩阵集合构成的群 (背) (特别记住同态时一对多, 群G中的元素更多), 则 矩阵群D(G) 称为 群 G 的一 个 维线性表示, 简称表示。”,同态或同构,可以理解上面结论。
- 群的不可约表示不一定是 群的不可约表示
- 当 为整数时 是 群的非真实表示,是 SO(3) 群 的单值表示
原因见北大群论209页。
- 当 为半整数时 是 群的真实表示; 此时 群的每一个元素都对应两个矩阵,不能保持群的乘法规律,严格说不是 SO(3) 群的表示,称为 SO(3) 群的双值表示
原因见北大群论210页。根据北大群论211页图5.3就知道确实有。
- 当 为整数时 是 群的非真实表示,是 SO(3) 群 的单值表示
- 荷载 群不可约表示 的基可以是球谐函数,见1.7节
4.O(3)群的不可约表示
没时间。
1.4节 李氏定理
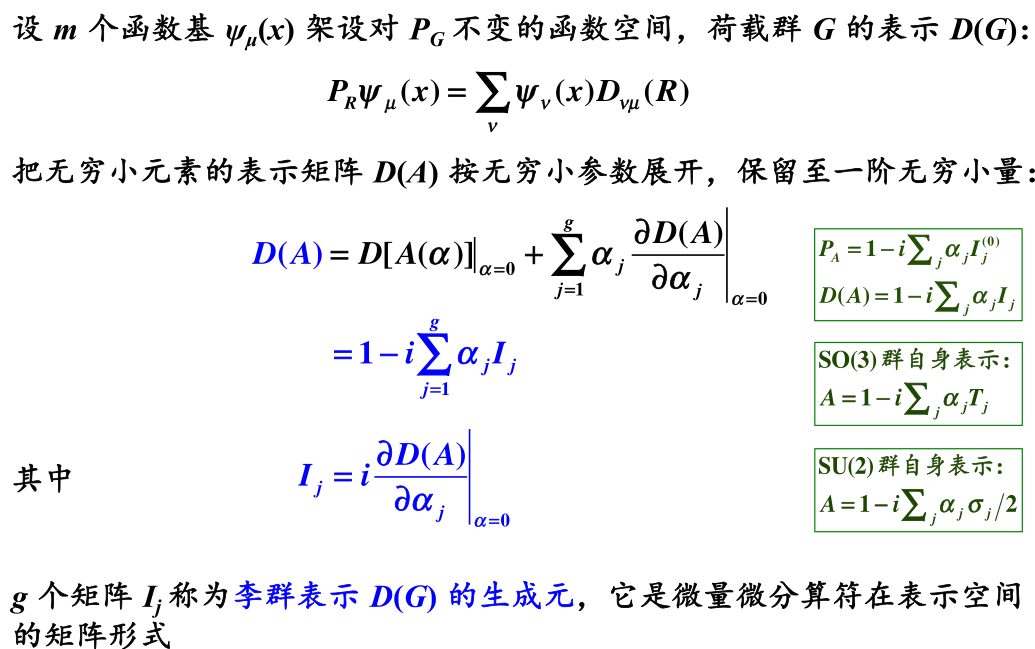
4.伴随表示
1)伴随表示的生成元
之前讲过,g维伴随表示描写生成元在共轭变换中的变换性质:

其中
取R为无穷小元素,有:
根据前面所讲的无穷小元素的表示矩阵
 知道,
知道,

注意右边的
是因为
是无穷小元素的矩阵元而不是矩阵。
得:
又根据李氏第二定理得:
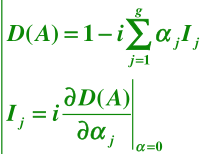
根据以上两个公式,得:![]()
其中![]() 是伴随表示的生成元。说明伴随表示的生成元是由李群的结构常数
是伴随表示的生成元。说明伴随表示的生成元是由李群的结构常数![]() 来决定的。
来决定的。
容易证明,这组生成元满足:![]() .
.
2)求伴随表示
- 通常伴随表示并不由其定义式通过微商计算,也不由其生成元通过解微 分方程计算,而是通过把已知的表示生成元和 比较来确定
例如, 群和 群有相同的结构常数,其伴随表示的生成元为
 (70)
(70)
这就说明伴随表示的生成元是 群自身表示的生成元。这不奇怪,因为以前证明过, 群的伴随表示就是 群自身表示。
(70)还说明,SO(3)群和SU(2)群的伴随表示就是SO3)群的自身表示(背)。 
对SO(3)群的自身表示,根据 知,可以直接计算
知,可以直接计算 ,过程省略,得:
,过程省略,得:

这也说明了SO(3)群的伴随表示就是它的自身表示。
3)微量微分算符
a.重要公式
以前说过,SO(3)群的微量微分算符是轨道角动量算符,根据前面说的微量微分算符的共轭变换:
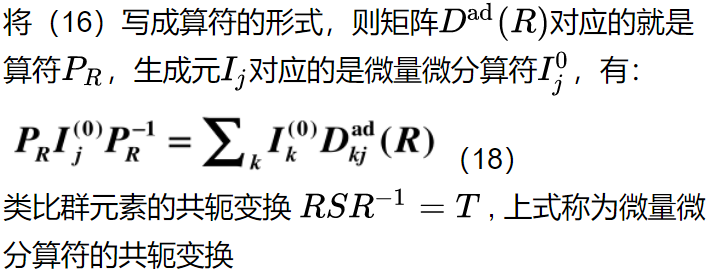
知道,![]()
因为对SO(3)、SU(2)群来说,其伴随表示
就是自身表示.
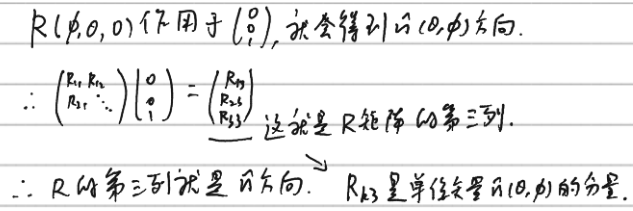
在上面公式中取一个特殊的R: , 则 是单位矢量 的分量。
原因:中的R的三个参数是欧拉角,看成绕定坐标轴的转动,根据
知道,是先绕y方向转,再绕z方向转,
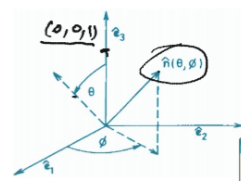
故这特殊的R就是前面介绍SO(3)群时说过的将 轴上的点转到 方向的变换 .
取j=3,得到:
![]() (背)(72)
(背)(72)
其中R是将 轴上的点转到 方向的变换 .
证明:
b. 这个公式在物理上的应用:
这个公式在物理上的应用:
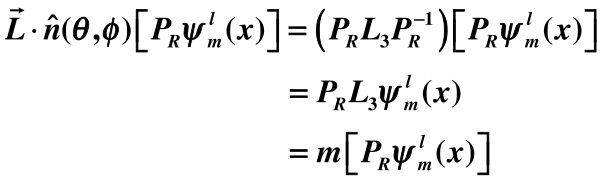
若 是属 群不可约表示 列的函数(即是荷载这个 群不可约表示 的基,比如后面说了球谐函数就是属 群不可约表示 列的函数),则:
![]()
证明:
我觉得这里的其实相当于前面不可约表示一节中的j:
因为是微量微分算符,是算符,故根据上面公式和(老师说应该是根据
 的过程来求出微量微分算符的矩阵形式,即此微量微分算符在所给定的这个表示中的生成元,推导过程估计复杂,老师没讲推导),得:
的过程来求出微量微分算符的矩阵形式,即此微量微分算符在所给定的这个表示中的生成元,推导过程估计复杂,老师没讲推导),得:
![]() ;
;
同理可以知道作用于基上的公式,再根据可以得到:
![]()
根据以上,有:
又根据![]() 和
和![]() 可以知道
可以知道
![]()
![]()
![]()
![]()
故 为 和 的共同本征函数,本征值分别为 和 .
注意前提条件:其中R是将 轴上的点转到 方向的变换 .
例如若将取为x轴,则为 和 的共同本征函数.
共同本征函数的求法是:根据前面SO(3)的不可约表示一节的知识可以求出表示矩阵元![]() ,再根据
,再根据![]() 就可以求出共同本征函数。
就可以求出共同本征函数。
1.5节 SU(2)群直乘表示的约化 没时间,和CG系数有关,以后需要的时候再学吧
1.7节 物理应用
1.球谐函数:是荷载这个 群不可约表示 的基
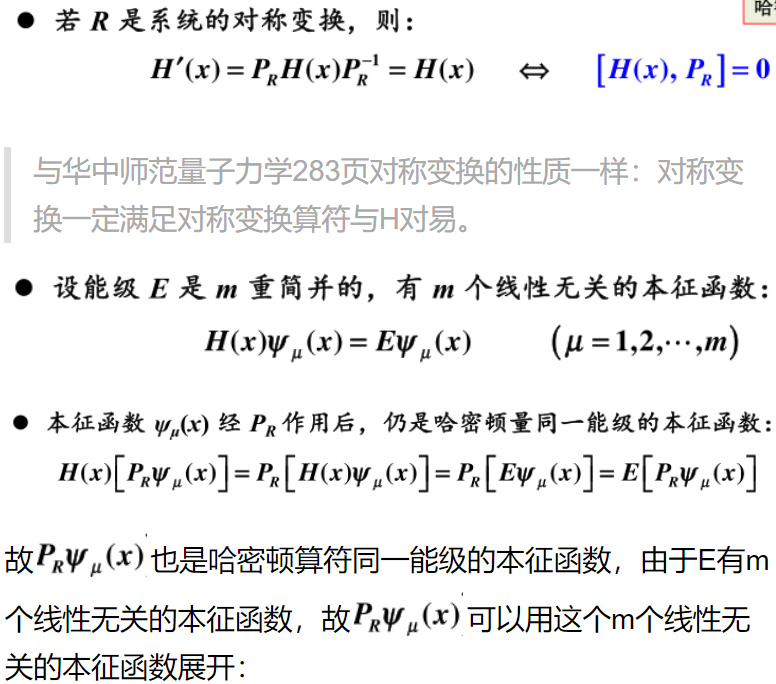
球对称系统的对称变换群是SO(3)群,所谓的系统具有SO(3)对称性就是指系统的哈密顿量H(x)在转动变换中保持不变。对无自旋系统,
![]()
不变,就说明变换后还等于H(x)
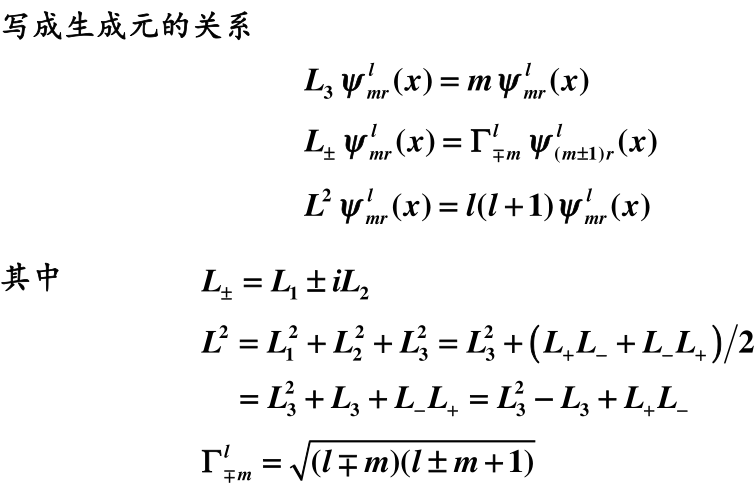
设能级 是 重简并的,有 个线性无关的本征函数 , 它们荷载 SO(3) 群的表示
![]()
其中是SO(3) 群中元素R对应的算符,故知,就是SO(3)群的表示的矩阵元。
以上公式的原因:第三章中:
此表示通常是可约的,将其按 SO(3) 群的不可约表示约化

以上就是荷载不可约表示的基
![]()
这是因为这个基荷载不可约表示,见第三章。
类似伴随表示一节的方法,可以得到:
即:属 群不可约表示 列的函数,是 和 的共同本征函数
(以上的过程是从群论的角度求共同本征函数的方法)
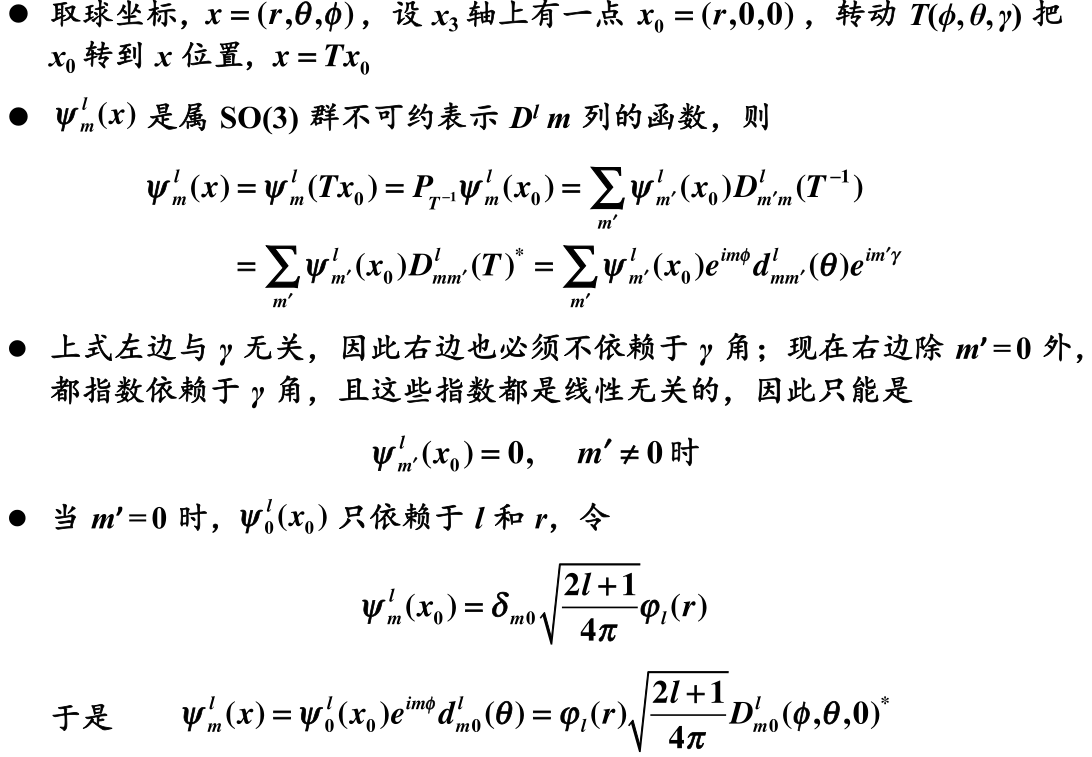
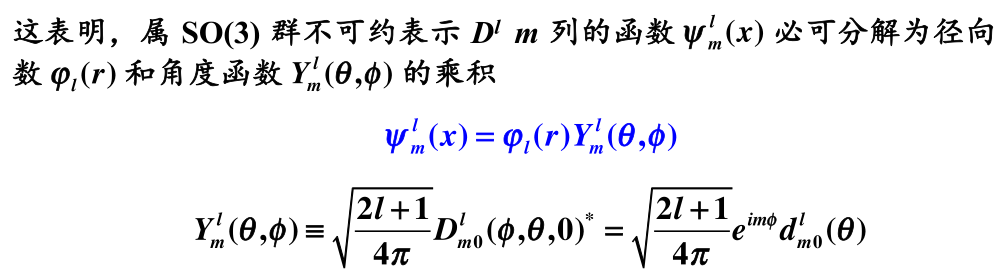
径向函数在转动变换中不变,故角度函数 是属 群不可约表示 列的函数(即是荷载这个 群不可约表示 的基) , 是 和 的共同本征函数, 称为球谐函数(背)
后面还有标量场、矢量场、旋量场、球谐函数、总角动量算符、不可约张量算符、Wigner- Eckart定理等没听。总角动量算符和旋量场这一节可能很重要,和自旋轨道耦合有关。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 周边上新:园子的第一款马克杯温暖上架