群论第五章转动群(高温超导有SO(5)李群、电子自旋是SU(2)群,hubbard模型有so(4)群,重要)
第章
李群这些我真的不学,太难太复杂了,不是我能力范围内的数学,能力不够,就是能学懂也需要很多时间,而我没这么多时间,不是天才,太数学的凝聚态物理我不学,我不当这种物理研究者
1.1节 SO(3)群与SU(2)群
1.三维空间转动变换
1)空间转动变换的特点:保持原点不变、两点间距离不变、手征性不变
a.保持原点不变 与 之间的坐标变换是齐次的
b.保持两点间距离不变 是实正交矩阵
c.保持手征性不变 的行列式为 1
2)结论:三维空间的固有转动变换由幺模实正交矩阵(即行列式为1的实正交矩阵)描写(背)
3)补充:三维空间的非固有转动变换由行列式为-1的实正交矩阵描写
2.SO(3)群及O(3)群
群(三维转动群、三维幺模实正交矩阵群):
群(三维实正交矩阵群):
3.几个特殊的转动
1)绕 轴转 角的变换的转动矩阵
绕z轴转 角的变换的转动矩阵的指数形式:
绕 轴、 轴的转动变换矩阵及其指数形式:
2)将 轴上的点转到 方向的变换:
3)绕任意 方向转动 角的变换
4)参数(也即) 必须在半径为 的球体内连续变化
5)SO(3) 群中转动相同角度的元素互相共轭,转动相同角度的元素在一个类中,类由转动角度 描写
6)对于题目给出的一个转动变换矩阵,求转动角和轴的方向n的方法:
4.二维幺模幺正矩阵群(SU(2)群)
1)二维幺模 幺正 矩阵的集合,按照普通的矩 阵乘积,满足群的四个条件,构成群,记为 SU(2) 群
2)SU(2)群的任意元素
3)用实矢量 的球坐标 表示 群任意元素的三个独立实参数:
SU(2)群的任意元素可以表示为(背,考试可能考):
4) 群的任意元素由参数 描写 在半径为 的球体内连续变化 , 球体内的点和元素 一一对应,外球面上所有点都对应同一元素 -1
5) 群任意元素 的矩阵迹 (背)
6) 群 相同的元素互相共轭,构成一类
5.SO(3)群和SU(2)群的同态关系(重要)
1)二维无迹厄米矩阵 和 三维空间 点的位置矢量 是一一对应的
2)
a.
b. 群的任一元素 都对应 群一对元素 ,即SU(2)群的元素和SU(3)群的元素之间的关系
c. 群和 群 1: 2 同态(背)(北大群论书的证明更严谨)
1.2节 李群
1.李群的组合函数
1)连续群的群空间及阶数
2)SO(3)群和SU(2)群的群空间
3)SU(2) 群在物理上与自旋密切相关, 文献中常说“旋量转动 角才恢复原状“
3)组合函数
4)李群
2.李群的局域性质
3.生成元和微量微分算符
1)微量微分算符
例题1:SO(3)群的微量微分算符
例题2:SU(2)群的微量微分算符
2)生成元
3.李群的伴随表示
4.李群的整体性质 群论25节,53分钟 没时间,可能没用
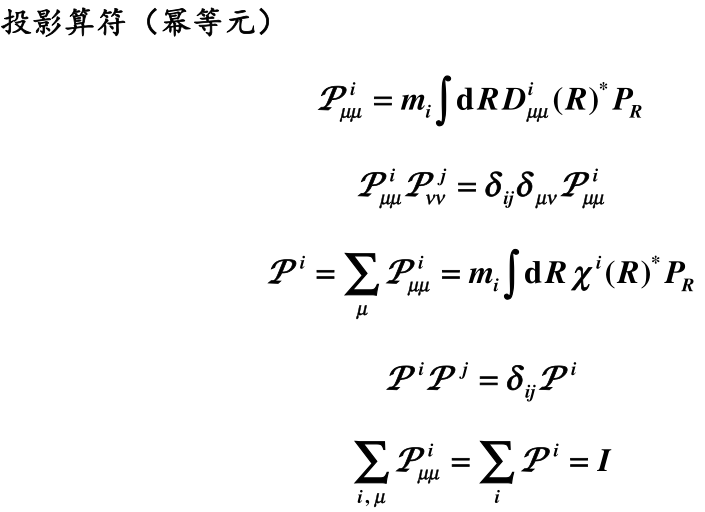
7.紧致李群的线性表示理论
李群这些我真的不学,太难太复杂了,不是我能力范围内的数学,能力不够,就是能学懂也需要很多时间,而我没这么多时间,不是天才,太数学的凝聚态物理我不学,我不当这种物理研究者
1.1节 SO(3)群与SU(2)群
1.三维空间转动变换
- 采用系统转动的观点;如右图建立直角坐标系K

- 任意点 由 矢量 或坐标 描述:
- 设转动 把 ,点转到 点 点位置矢量为,坐标为:

1)空间转动变换的特点:保持原点不变、两点间距离不变、手征性不变
a.保持原点不变 与 之间的坐标变换是齐次的
如果不是齐次的就意味着平移
实际上空间转动变换也是线性的,因为3维空间是线性空间。将一个矢量转动到另一个矢量,实际上是反映了线性变换(见为知笔记线性代数的本质),根据“线性代数的本质”知道,线性变换其实和矩阵乘法相联系,有:这种空间转动变换是:
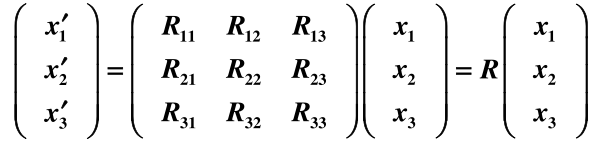
![]() (1)
(1)
b.保持两点间距离不变 是实正交矩阵
即:
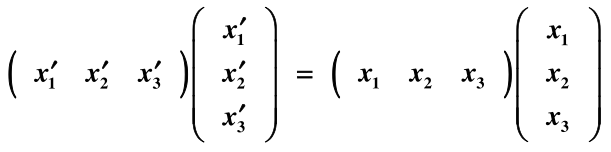
代入(1)得到:

根据“正交矩阵:,实正交矩阵:矩阵元都是实数的矩阵”,故知道:空间转动变换的矩阵为实正交矩阵。
c.保持手征性不变 的行列式为 1
”R的行列式为1“的证明:
- 建立固定在系统上的坐标系 , 其单位矢量为 , 则
转动后的矢量可以用以前的基来展开,也可以用系的基来展开:
 (3)
(3)
证明:

- 转动变换保持系统的手征性不变:即固定在系统上的坐标系的手征性不变:左手系转动之后还是左手系,右手系转动之后还是右手系。
坐标系的手征性是用单位矢量的混合积来确定的,对右手系:混合积为1,即,对左手系:混合积为-1.
手征性不变意味着固定在系统上的坐标系的单位矢量的混合积在变换前后都是1,即
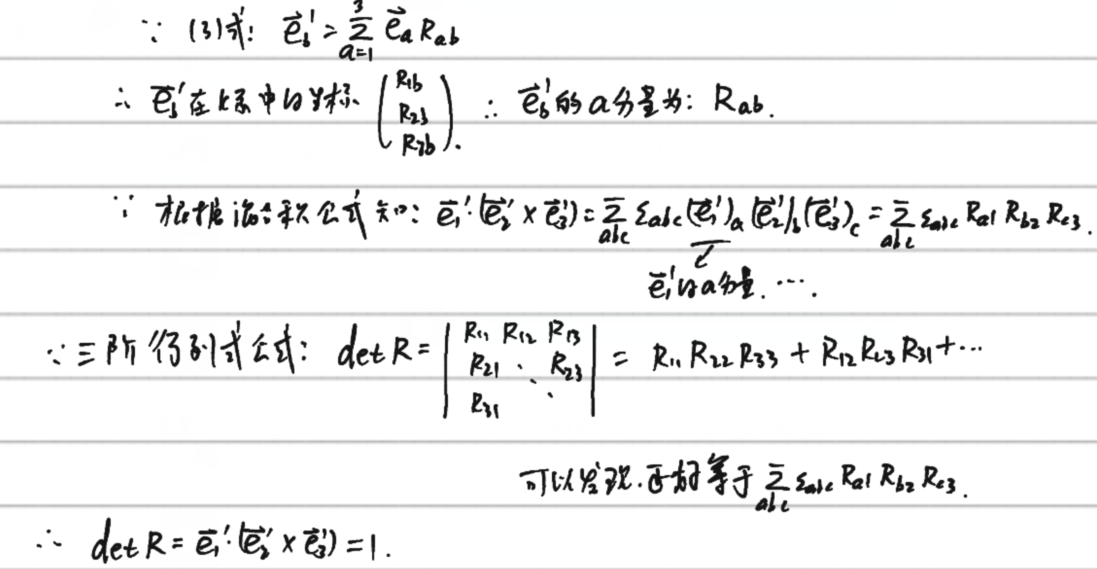
得证,R的行列式为1
2)结论:三维空间的固有转动变换由幺模实正交矩阵(即行列式为1的实正交矩阵)描写(背)
幺模矩阵:行列式为1的矩阵
3)补充:三维空间的非固有转动变换由行列式为-1的实正交矩阵描写
- 根据第一章线性代数知道,实正交矩阵的行列式只能是(背),分别对应固有转动和非固有转动
证明:因为行列式和转置行列式相等。
- 非固有转动元素是固有转动元素和空间反演的乘积,描写转动变换后再做空间反演变换
和固有转动不同,对非固有转动(有空间反演),手征性会改变。因为非固有转动也保持两点间距离不变,故其R也是实正交矩阵,但类似前面c.的证明,可以证明非固有转动对应的行列式为-1(这是因为手征性改变)
- 非固有转动改变系统的手征性
2.SO(3)群及O(3)群
群(三维转动群、三维幺模实正交矩阵群):
三维幺模实正交矩阵 , 描写一个矢量绕三维空间 方向转动 角的变换,按照矩阵的乘积规则,它的集合构成群,称为三维转动群,记作 SO(3) 群,其中 S 代表幺模,O 代表实正交
群(三维实正交矩阵群):
三维实正交矩阵的集合,按照矩阵的乘积规则构成群,称为三维实正交矩阵群,记作 O(3) 群,它描写三维转动变换和空间反演变换
- ** O(3) 群元素的个数是SO(3)的两倍**,因为其行列式可以是1或-1,
- ** O(3) 群是SO(3)和的一个直乘,直乘群,即,SO(3)群是O(3)的不变子群**,因为其指数是2.
群与 群同构。故 群也称 群。
3.几个特殊的转动
1)绕 轴转 角的变换的转动矩阵


构造一些辅助线可以证明,我证明了
绕z轴转 角的变换的转动矩阵的指数形式:

证明:

绕 轴、 轴的转动变换矩阵及其指数形式:


其中T矩阵(以后会说它是生成元)的矩阵元满足:
 (背)
(背)
T矩阵是无迹厄米矩阵:
根据三个轴的循环对称性,容易得到 绕 轴、 轴的转动变换矩阵。或者同理直接证明。
2)将 轴上的点转到 方向的变换:
转动步骤:先绕y轴转,再绕z轴转
1)在 平面 先绕 轴转 角
2) 绕 轴转 角
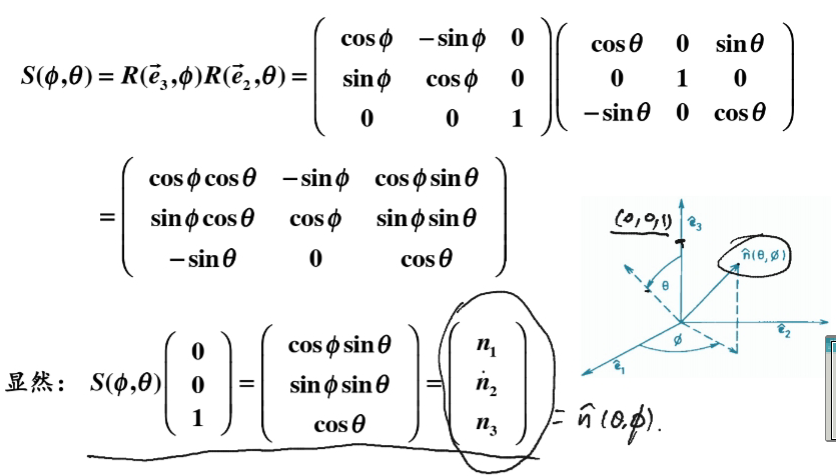
从变换矩阵知道,S与有关
是SO(3)群的元素,但是不方便用来参数化,这是因为![]() ,故不方便。但可以很方便地用欧拉角来参数化,根据“欧拉角的两种含义中的一种:三维转动变换R可分解为绕定坐标系的坐标轴的三个转动的乘积:
,故不方便。但可以很方便地用欧拉角来参数化,根据“欧拉角的两种含义中的一种:三维转动变换R可分解为绕定坐标系的坐标轴的三个转动的乘积:![]() ,即一个矢量先绕定坐标轴z轴转,再绕定坐标轴y轴转,最后绕定坐标轴z轴转.”可以知道,的欧拉角参数为(可能考)
,即一个矢量先绕定坐标轴z轴转,再绕定坐标轴y轴转,最后绕定坐标轴z轴转.”可以知道,的欧拉角参数为(可能考)
根据这些矩阵,通过计算可以验证:
![]() (10)
(10)
其中:![]()
3)绕任意 方向转动 角的变换
群任意元素 的描写方法:
绕任意 方向转动 角的变换可表示成三个转动的乘积:
1) 把 方向转到 方向
2) 绕 方向转 角
3) 把 方向转回到 方向:
有点不严谨,因为 是一个矢量绕n方向转的变换矩阵,应该证明一下,当轴从 方向转到 方向 时,使用这个也可以使这个矢量转到对应位置。但我没时间,没证明这个。
背,可能考:绕任意 方向转动 角的变换的转动矩阵:
其中矢量,其球坐标为 ,直角坐标为
注意这个口诀,最多是角度
证明:先证明:
(11)


4)参数(也即) 必须在半径为 的球体内连续变化
根据(12)知:
群任意元素由参数 描写(即三个参数来描写) , 为了使得物理上的转动和数学上的参数一一对应,参数的范围:参数(也即) 必须在半径为 的球体内连续变化 ,此时,数学上球中的一个点和物理上的一个转动一一对应;球体内的点和 群(三维幺模实正交矩阵群)的元素 一一对应,球面上直径两端的点代表同一个转动。
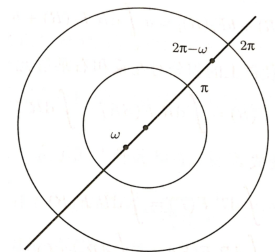
因为球面直径两端的点分别代表绕n方向转和绕-n方向转,根据后面的图1知,物理上是同一个转动。
证明“参数的范围”:
考虑物理上的转动是否和数学上的参数一一对应:
故物理上一个转动其实可能对应数学上的两个参数,也即可能对应转动矩阵和.
故应尽量地将参数的变化范围限制(比如不能取),使得物理上的一个转动,对应的数学上的参数是唯一的,此时变换矩阵也就是唯一的。我们可以将的变化范围缩小到半径为 的球体内,这是因为可以绕任意n方向转,故是一个球体,的大小不能超过,因为绕某一个方向n转度,相当于绕n方向的相反方向转度,
 (图1)
(图1) (图2)
(图2)
故不能超过;当然,中范围的最大值也不能小于,否则就不能刻画某些转动。
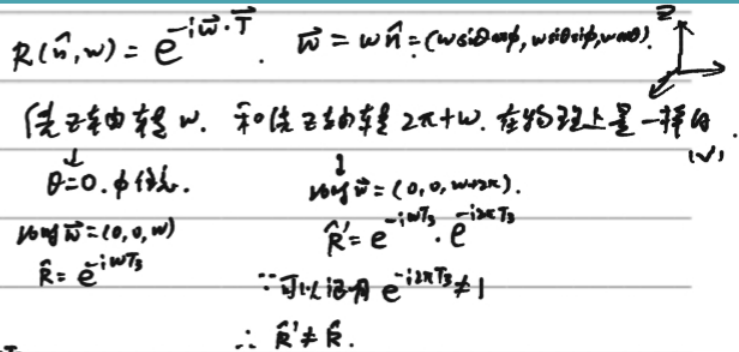
一些公式:

此式在物理上和数学上均成立:

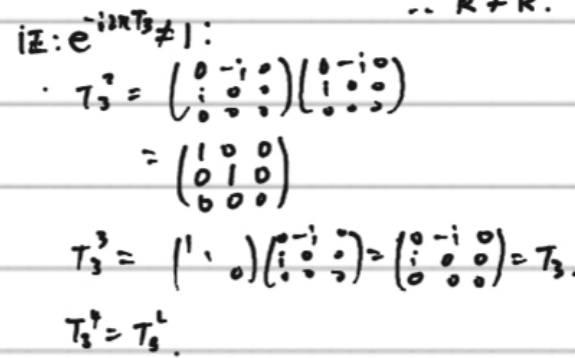
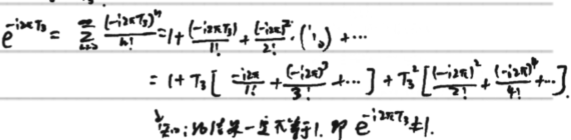
物理上,一个矢量绕n方向转2pi,和没转这个矢量是一样的,故转动矩阵确实等于1。但在数学上我验证了不成立,因为也可以通过、
、
来直接计算,得到结果后可以发现

,其中a是.此结果并不等于1.

物理上,根据图1知道。数学上,其实也不成立:

![]()
在物理上成立:
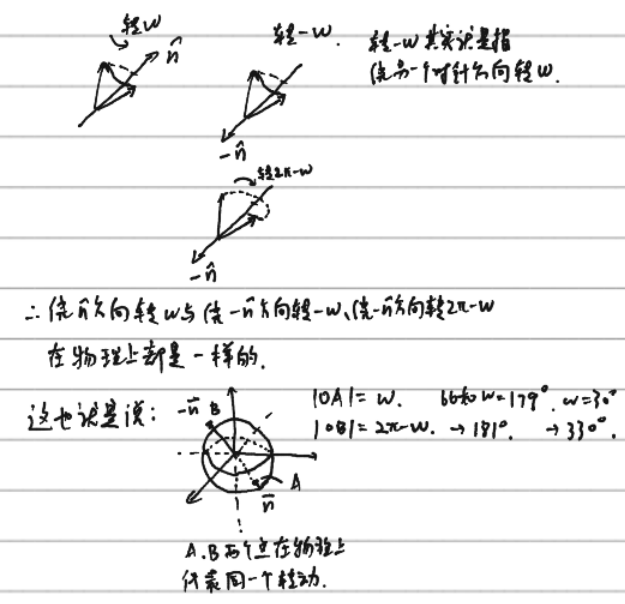
在物理上成立,但在数学上不成立(在数学上不是恒成立,只是一个规定)。
5)SO(3) 群中转动相同角度的元素互相共轭,转动相同角度的元素在一个类中,类由转动角度 描写
这里说绕任意轴,只要转相同角度,都在一个类中。
证明:因为前面在求出绕n方向转的变换矩阵时,得到了:
,这其实也就是共轭的定义,故绕任意n方向转和绕z方向转的元素共轭,第二章讲了共轭的传递性,故转相同角度的元素互相共轭。得证。
6)对于题目给出的一个转动变换矩阵,求转动角和轴的方向n的方法:
求出这个矩阵的迹,再令此迹等于,既可求出转动角.
证明:根据
知道:.
求出变换矩阵R的本征值为1的本征矢量,再将这个矢量除以它的大小,即得到或方向(但这个方法无法确定是还是):
证明:是一个矢量绕n方向转的变换矩阵,若这个矢量的方向就是在或方向,则转完之后还是在这个方向,故本征值为1.但是去求R的本征值为1的本征矢量时,求出来的矢量可能是沿着方向,也可能是沿着方向,故这个方法无法确定是还是。但实际上,给一个转动矩阵,则其和n方向是唯一确定的,只不过我们不能通过这个简单的方法来求出是还是,还需要其他方法来确定,这个其他方法就是用欧拉角来确定。
4.二维幺模幺正矩阵群(SU(2)群)
1)二维幺模 幺正 矩阵的集合,按照普通的矩 阵乘积,满足群的四个条件,构成群,记为 SU(2) 群
二维单位矩阵是幺模幺正的,一个幺模幺正的矩阵,其逆也是幺模幺正的;两个幺模幺正的矩阵相乘也是幺模幺正的,故满足群的条件。
2)SU(2)群的任意元素
设 ,幺模幺正的条件:
,幺模幺正的条件:
 ,
, ,得到:
,得到:
 ,故可以将SU(2)群的任意元素记为:
,故可以将SU(2)群的任意元素记为:

因为a,b都是复数,故可以知道:SU(2)群的任意元素包含三个独立实参数。
3)用实矢量 的球坐标 表示 群任意元素的三个独立实参数:
令
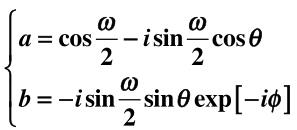 ,可以验证这样令可以
,可以验证这样令可以![]() 。
。
故SU(2)群的任意元素可以表示为:
 (1)
(1)
其中 是 群任意元素的三个独立实参数。
群任意元素的迹:
考虑到
 (2)
(2)
将(1)、(2)对比,知道
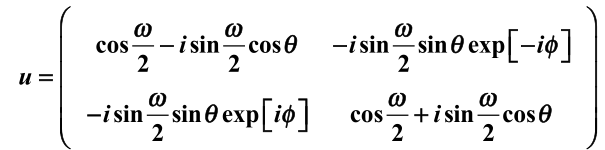
SU(2)群的任意元素可以表示为(背,考试可能考):
 (3)
(3)
这个公式可以类比SO(3)群的元素公式来记忆:,其中称为SO(3) 群自身表示的生成元。而对SU(2)群:就是SU(2)群自身表示的生成元。(u这个矩阵群是自身的一个表示,称为自身表示)
其实后面还会发现的对易关系和的对易关系也是一样的,因为后面我们知道,一个是轨道角动量,一个是自旋角动量,它们都满足角动量的对易关系。
记住:
 (背)
(背)
4) 群的任意元素由参数 描写 在半径为 的球体内连续变化 , 球体内的点和元素 一一对应,外球面上所有点都对应同一元素 -1
为了尽量缩小参数的变化范围,使得数学上的一组参数和物理上的一个元素是对应的,比如如果缩小范围,则根据(1)知道,和对应的元素u是相同的;绕n方向转和绕-n方向转对应的元素u是相同的(因为根据(3)知道,都取负号结果相同);若,根据(1)知道,结果等于1,若,结果等于-1. 注意这和SO(3)群不同,SO(3)群是转等于1.




证明:因为“绕n方向转和绕-n方向转对应的元素u是相同的”,故


证明:
参数 限制在半径为的球体中的原因:

这时会发现球体内的点和元素 一一对应,外球面上所有点都对应同一元素 -1
这是因为
和SO(3)群对比:球体内每个点代表一个元素,直径两端的点对应相同的转动,即对应同一个元素R。
5) 群任意元素 的矩阵迹 (背)
6) 群 相同的元素互相共轭,构成一类

对进行泰勒展开可以证明:

根据和共轭定义知道,对任意轴方向, 相同的元素互相共轭
5.SO(3)群和SU(2)群的同态关系(重要)
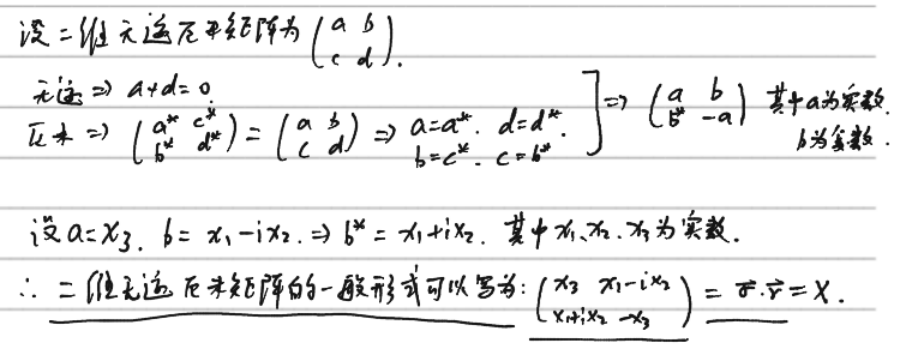
1)二维无迹厄米矩阵 和 三维空间 点的位置矢量 是一一对应的
- 以三维空间点P的直角坐标为参数,定义二维无迹厄米矩阵:

有: ,故是无迹厄米的。
,故是无迹厄米的。 - 任何二维无迹厄米矩阵只包含三个独立实参数,可展开为泡利矩阵的实线性组合:
- 可以证明:
 、
、 (6)
(6)
证明:
 ,其他同理。
,其他同理。 - 故知道,二维无迹厄米矩阵 和 点的位置矢量 是一一对应的,一个 点的位置矢量就唯一地对应一个无迹厄米矩阵,一个无迹厄米矩阵也唯一地对应一个 点的位置矢量.
2)
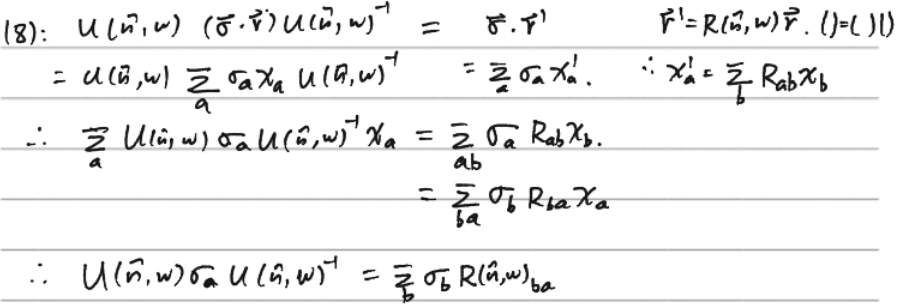
a.
取 群的任意元素 , 令
 (7)(其实这就是对X进行幺正的相似变换)
(7)(其实这就是对X进行幺正的相似变换)
仍为无迹厄米矩阵, 且与 有相同的行列式, 它对应空间 点的位置矢量 , 其中 和 差一转动变换R
根据(7)得到:
 (8)
(8)
证明:迹有轮换不变性,故迹不变。第一章线性代数复习时讲过,幺正的相似变换中厄米矩阵保持其厄米性,故还是厄米的。因为矩阵相乘的行列式等于行列式相乘,故知道行列式相同。
因为二维无迹厄米矩阵 和 点的位置矢量 是一一对应的,故对应另外一个点 点的位置矢量 。
因为行列式相等,根据(6)知道,和 点到坐标原点的距离相等,故 和 差一转动变换。
b. 群的任一元素 都对应 群一对元素 ,即SU(2)群的元素和SU(3)群的元素之间的关系
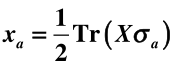
- 为求 , 将 分解为平行和垂直于 的分量:




其中利用了

故前面(8)式中的转动变换矩阵R就是SO(3)群中绕方向转的转动变换矩阵,即. - 现在知道了转动变换矩阵就是绕方向转的转动变换矩阵后,就可以求出SU(2)群的元素和SU(3)群的元素之间的关系(背):
 (10)
(10)
证明:
后面会讲,(10)其实就是说明了:SU(2)群的伴随表示就是SO(3)群的自身表示。
c. 群和 群 1: 2 同态(背)(北大群论书的证明更严谨)
群的任一元素 都对应 群一个确定元素 ,这种对应关系对群元素乘积保持不变.
证明:因为确定,则可以根据(1)式知道是确定的(不过应除去 群中-1这个元素,因为-1可以对应整个球面),故可以根据求出的表达式,故 群的任一元素 都对应 群一个确定元素 (不过应除去 群中-1这个元素,因为-1可以对应整个球面)。且 和之间可以通过(10)式联系起来。

这就证明了元素对应,元素乘积也对应,说明SO(3) 群与 SU(2) 群同构或同态。


G中的元素更多。
下面判断是同构还是同态:
群的任意元素 把坐标矢量 转为
![]()
由于 和 都是二维无迹厄米矩阵,且行列式相同, 它们必可通过二维幺模幺正相似变换 联系起来(这个结论应该数学证一下,没时间,算了,见(7)式)
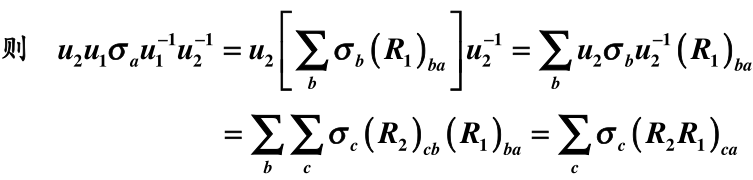
设联系它们的相似变换为u1和u2,设
得
即 与所有 对易,它必为常数矩阵,令
考虑到 det , 则 ,故.
这表明 , 群的任一元素 都对应 群一对元素 ,对应规则为(背):
这是根据
可以知道的。

一个R和其对应的两个u都表示在图中了。
这个结论是从(10)式得到的,但是我觉得(10)只是求出来的u和R的一个关系,它是真的完全完备的对应关系吗?所以我觉得这个证明可能有问题。正确证明见北大群论书,北大群论书用同态核定理确实严格证明了,北大群论书的证明是严谨的。
综上 ,** 群和 群 1: 2 同态
1.2节 李群
没听,但是生成元的内容可能很重要。先学场论吧。以后时间多着呢,很多年后可能有时间。
1.李群的组合函数

1)连续群的群空间及阶数
- 连续群每一个群元素都可用一组在欧氏空间一定区域内连续变化的独立实参数来描写
比如SO(3)群每个群元素可以用三维参数空间半径为pi的球体来描写。
- 缩减参数的变化区域,使在测度不为零的区域,群元素和参数值一 一对应
测度不为零的区域:维数等于群空间维数的区域三维空间体积元,而球面上dr=0,此时说其测度等于0,因为本来是三维的,但球面是二维的,维数比它低,测度就是0
- 群空间:参数的变化区域,
群空间的维数、连续群的阶:独立实参数的数目即群空间的维数,称为连续群的阶
SO(3)群的群空间:半径为的球,群空间是3维的
SU(2)群的群空间:半径为的球,群空间是3维的,球面的测度为0,在测度不为零的地方,即球体内,群元素和参数值一 一对应
2)SO(3)群和SU(2)群的群空间
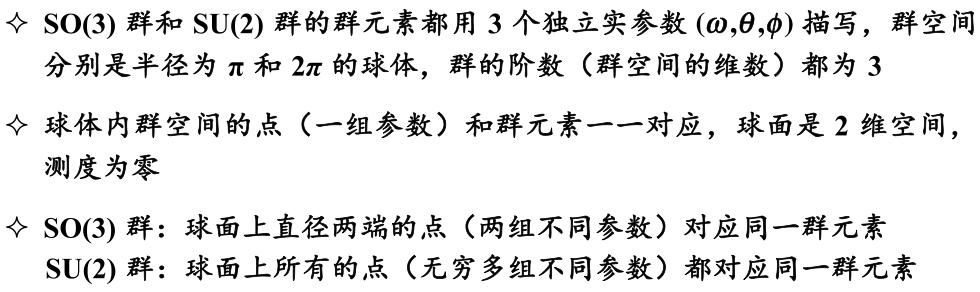
- 在半径为 的球体内, 群和 群的元素一一对应
群还有半径从 到 的环所对应的元素,它们等于半径为 的球体中相应元素u的负值
SU(2) 群一对元素对应 SO(3) 群同一元素
3)SU(2) 群在物理上与自旋密切相关, 文献中常说“旋量转动 角才恢复原状“
SU(2) 群一对元素对应 SO(3) 群同一元素
通常把 群的元素 也称为绕 方向转动 角的变换。
SU(2) 群在物理上与自旋密切相关, 文献中常说“旋量转动 角才恢复原状”
这是因为、,即这个2X2矩阵作用于两分量的旋量上,得到的还是这个旋量,即旋量恢复原状。因为“ 群的元素 也称为绕 方向转动 角的变换。”,故类比SO(3)群元素R作用于矢量是在将矢量绕n转,说作用于旋量是在将旋量绕n转,即说旋量转 角才恢复原状。
3)组合函数
- 群空间测度不为零的区域内的点与群元素一一对应,可以等价地把群空间的点直接叫做群元素
- 连续群G的组合函数
设元素 , 参数为 , 简写为
对群元素的乘积 和 唯一确定了 , 即t是r和s的函数,即 个参数 是 个参数 和 的函数:

组合函数: 个函数 称为连续群的组合函数两群元素乘积的参数是两元素参数的函数,这个函数就是组合函数。
群的乘法关系确定群的本质特征,组合函数完全地描写了群元素的乘积规则 群 的组合函数完全地表征群
- 组合函数定义域是 , 值域是 , 至少在有测度的区域是单值函数
比如SU(2)群,绕n方向转pi的元素u和绕n方向转pi的元素u乘起来,得到u(n,2pi)=-1,而球面上对应的元素就是-1,-1的参数有无穷多组,故这样的乘就不是一一对应的。但在有测度的地方,组合函数是单值函数。这是因为可以等价地把群空间的点直接叫做群元素。
即使很简单的群,组合函数的具体形式往往也相当复杂,组合函数主要用于理论分析, 很少用来进行具体计算
4)李群
- 元素的集合构成群的条件用组合函数表述为:

注意恒元在群空间中是在哪:
对SO(3)群的群空间,其原点对应,根据群元素R的公式知道,R=1,即恒元。故恒元对应的是群空间的原点。
对SU(2)群也一样。 - 李群:若组合函数是解析函数,则该连续群称为李群
由于解析函数连续可微,李群可用微积分的工具来研究,它是至今研究最深入、最成功的无限群
2.李群的局域性质
- 群空间中群元素R的点的邻域中各点对应的元素称为R的邻近元素
- 若把恒元的参数取为零(比如),恒元邻近的元素的参数通常是无穷小量,恒元邻近的元素称为无穷小元素
- 无穷小元素与任意元素R的乘积,是R的邻近元素
R的邻近元素与相乘,得无穷小元素
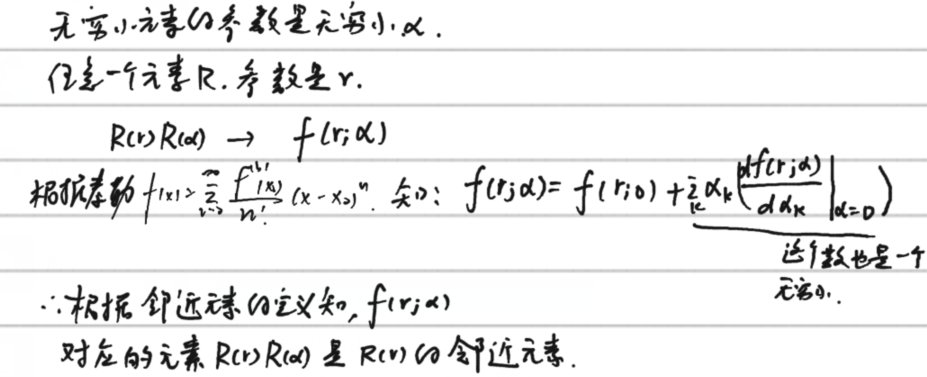

- 无穷多个无穷小元素相继乘到群元素 上, 在群空间表现为由元素 对应点出发的一条连续曲线 群空间中若代表元素 的点和代表恒 元的点可通过连续曲线连接, 则 可表为无穷多个无穷小元素的乘积
SO(3)、SU(2)满足任何一个元素可以和恒元通过连续曲线连接。但是O(3)不行,O(3)的群空间实际上要分成两个不连续的片,有两个球,一个球是SO(3),另一个球是跟它分离的,不是连续的。因为一个行列式是1,一个行列式为-1。
- 取恒元参数为零,将无穷小元素 和 乘积的参数作 Taylor 展 开,保留至一阶无穷小量:

证明:

又因为根据前面所说

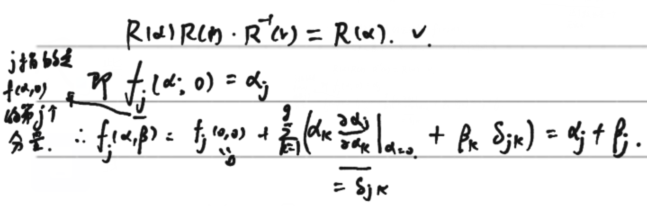
这表明: 1)无穷小元素相乘, 参数相加
2) 互逆的无穷小元素的参数互为相反数, 即
因为互逆的两个元素相乘等于恒元,故参数相加等于0,故2)得证。
因为无穷小元素相乘, 参数相加,故无穷小元素乘积次序可交换。
3.生成元和微量微分算符
群G中的无穷小元素在线性算符群 (线性算符群是描写不变函数空间中函数的变换关系)和线性表示 中的性质?
1)微量微分算符
- 元素 对应标量函数变换算符
- 取 为无穷小元素 , 将上式按 展开, 保留至一阶无穷小量:

其中是对应的参数。也是无穷小量。上面公式是根据多元函数泰勒展开。

因为对应的是恒元,故得到第一项。第二项是进行了一个变量代换:

综上,![]()
![]()

其中 为 个微量微分算符
只要参数是独立的 就是线性无关的。
证明:比如对SO(3)或SU(2),有三个独立实参数,则根据微量微分算符的公式知道有3个线性无关的微量微分算符,这是显然的,因为否则若这三个算符是线性相关的,说明其实只有两个独立的算符,即有两个独立实参数,这矛盾。故得证。
- 李群无穷小元素对标量函数的作用由微量微分算符完全描写
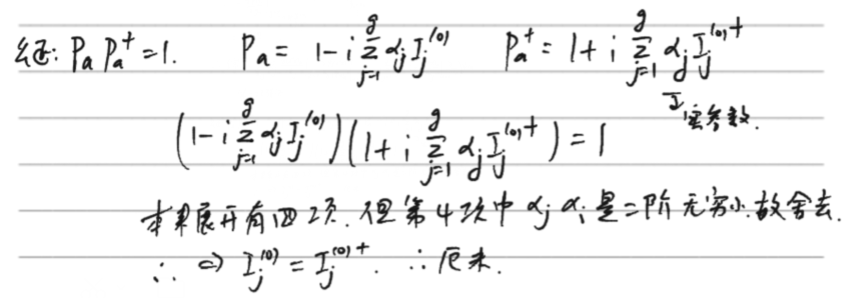
若 是幺正算符,则微量微分算符 是厄米算符
证明:
例题1:SO(3)群的微量微分算符
根据前面邻近元素、无穷小元素的定义知,将元素中的参数取为无穷小量,即得到无穷小元素:
![]() (这是根据矩阵乘法和第j个分量的定义)
(这是根据矩阵乘法和第j个分量的定义)
 (11)
(11)
证明:

将(11)和![]() (这个是根据T矩阵的表达式可以证明)代入微量微分算符的定义,得到:
(这个是根据T矩阵的表达式可以证明)代入微量微分算符的定义,得到:
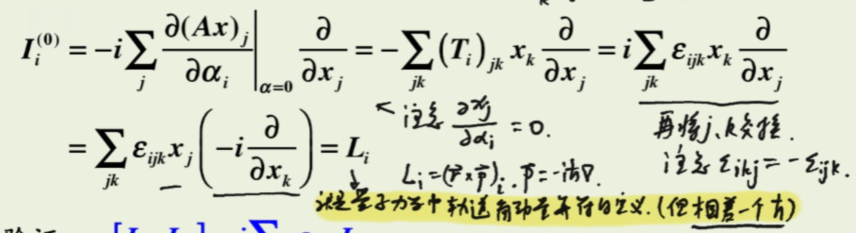
注意最后的结果恰好等于量子力学中轨道角动量算符的定义(但相差一个)
可以验证(量子力学中证明过):![]()
以上表明:SO(3)群的微量微分算符正是量子力学中的轨道角动量算符(但相差一个)
例题2:SU(2)群的微量微分算符

(注意因为泡利矩阵是二维的,故无穷小元素也是二维的,故其作用的x也是二维的旋量)
这里是将 定义为,将其展开:
定义为,将其展开:

根据以上可以验证:![]()
通常将 SU(2) 群的元素看成二维内部空间(旋量)的转动,对应的微量微分算符正是量子力学中的自旋角动量算符。
2)生成元
- 设 个函数基 架设对 不变的函数空间,荷載群 的表示 :

- 把无穷小元素的表示矩阵 按无穷小参数展开,根据多元函数泰勒展开公式,保留至一阶无穷小量:

 (背)
(背)
 (背)
(背)
个矩阵 称为李群表示 的生成元,它是微量微分算符在表示空间的矩阵形式。
原因:D(A)是在表示空间中的矩阵形式,
以上两个公式对比知道生成元就是微量微分算符在表示空间中的矩阵形式。 - 通常微量微分算符也称为生为元, 生成元也成为微量微分算符,因为一个是在中的性质,一个是在中的性质,故不严格区分。
- SO(3) 群的自身表示的生成元:
注意应说出是什么表示才能说生成元。
自身表示:矩阵群,自己是自己的表示就是自身表示。
根据自身表示和前面的例题中
 (这其实就是SO(3)群的自身表示)
(这其实就是SO(3)群的自身表示)
及知道,SO(3) 群的自身表示的生成元:
而因为SO(3) 群的微量微分算符是轨道角动量算符,故轨道角动量算符(对应的)在三维空间中的矩阵形式就是根据自身表示知道,其表示空间就是三维空间。
SU(2)群同理,SU(2)群自身表示的生成元是。故自旋角动量算符(对应的)在二维空间的矩阵形式是
量子力学中自旋角动量
SU(2)的自身表示:![]()
- 若是李群 G 的真实表示, 则 g 个生成元线性无关
原因和前面解释“只要参数是独立的 就是线性无关的。”一样,没时间。
幺正表示的生成元是厄米矩阵
证明:和前面证明“若 是幺正算符,则微量微分算符 是厄米算符”的过程一样。
SO(3)群、SU(2)群可以知道是幺正的,故其自身表示是幺正表示,故其生成元是厄米矩阵。
3.李群的伴随表示
- 设 , 可以知道,T的参数应该由R和S的参数来决定,即是R、S的参数的函数,故参数之间的关系为
但注意这个不是组合函数,因为组合函数是两个相乘,而是三个相乘。
- 表示矩阵满足 (这是表示的性质), 对真实表示,两边对s求偏导数,并最后令s=0,注意右边对s求偏导数需要先对t求,再对s求,有:

右边中的t=0是因为最后令s=0时,根据知道,因为s=0对于的是恒元,故此时T也是恒元,其对应的参数是t=0,故也应将t=0代入。
故在上面公式中两边乘以i,并根据生成元的定义![]() 知道,
知道,
![]() (16)
(16)
其中定义
 (17)
(17)
- 和 通过上式一一或多一对应,该对应关系对群元素乘积保持不变, 故 的集合构成李群的一个表示,称为伴随表示
根据(16)知,伴随表示刻画的是生成元在共轭变换下的变换性质,即一个生成元进行共轭变换,等于这些生成元的组合,组合系数排列成矩阵,构成的表示就称为伴随表示。 - SU(2)群的伴随表示:若D(R)取为SU(2)群的自身表示u(n,w),其生成元是,根据前面SO(3)与SU(2)同态一节中证明过的公式:
 知道,SU(2)群的伴随表示就是SO(3)群的自身表示。
知道,SU(2)群的伴随表示就是SO(3)群的自身表示。 - 根据(17)知道,伴随表示的维数等于生成元的个数,即伴随表示的维数等于李群的阶数,它是所有李群都有的重要表示
参数的变化区域称为群空间,独立实参数的数目即群空间的维数称为连续群的阶。生成元的个数是g,参数的个数也是g。

- 将(16)写成算符的形式,则矩阵对应的就是算符,生成元对应的是微量微分算符,有:
 (18)
(18)
类比群元素的共轭变换 , 上式称为微量微分算符的共轭变换
伴随表示描写了微量微分算符(或生成元)在共轭变换中的变换性质
(18)的严格证明没有老师说,没时间。
4.李群的整体性质 群论25节,53分钟 没时间,可能没用
7.紧致李群的线性表示理论
线性表示等价于幺正表示,两等价的幺正表示可通过幺正的相似变换相联系
实表示等价于实正交表示,两等价的实正交表示可通过实正交的相似变换相联系
可约表示是完全可约的;表示是不可约表示的充要条件是找不到非常数矩阵与所有表示矩阵都对易
不等价不可约幺正表示的矩阵元和特征标满足正交关系:
任何表示都可按不可约表示约化:

两表示等价的充要条件是每个元素在两表示中的特征标对应相等
表示是不可约表示的充要条件是特征标满足:![]()