Pytorch系列:(九)正则与常用归一化
L1 & L2
L1正则
L1正则算法如下:
其中\(|x_i|\)表示绝对值。
在Pytorch 中,没有自带L1正则方法,所以需要手动写
reg_loss = 0
for param in model.parameters():
reg_loss += torch.sum(torch.abs(param))
loss = criteon(logits,target)
loss = loss + 0.01 * reg_loss
optimizer.zero_grad()
loss.backward()
optimizer.step()
L2正则
L2正则计算方法如下:
在pytorch中,优化器中再带L2正则,使用方法如下:直接设定weight_decay 参数即可。
optim = torch.optim.SGD(net.parameters(), lr = 0.0001, momentum = 0.8, weight_decay=1e-2)
模型中常用四种归一化
在前向传播过程中,模型的数据会出现分布偏移,使用归一化可以将偏移进行校正,对中间输出的值进行归一化。好处是可以加速模型收敛,而且不用精心设计权重初始化。
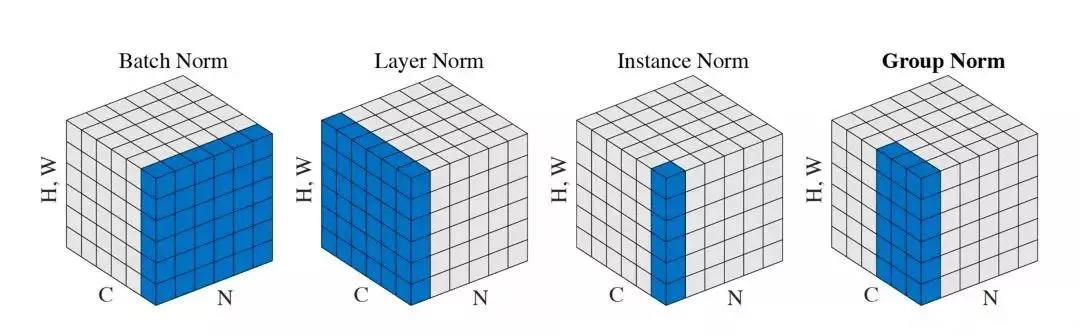
BatchNorm
BatchNorm 计算法方法如下:
在pytorch中,Batch Normalization 模块一般放置在激活函数前面。其函数如下:
nn.BatchNorm1d()
nn.BatchNorm2d()
nn.BatchNorm3d()
参数:
num_feature: 样本的特征数量
eps: 分母修正项
momentum: 指数加权平均,用于计算均值方差
affine: 是否要进行affine transform ,意思是是否计算 \(y_i = \gamma \hat x_i + \beta\)
track_running_stats: 表示是否估计新的均值和方差,如果是训练阶段,会计算每一个batch的的均值和方差,如果是测试阶段,均值和方差是固定的。
Batch中的主要属性:
running_mean:均值
running_var:方差
weight: affine transform 中的 gamma, 既\(\gamma\)
bias : affine transform中的beta, 既\(\beta\)
需要注意的是,如果设置了momentum,那么均值的计算会考虑上次的均值
BatchNorm 的核心是,对于每一个batch的数据,假设有N个特征,这个N个特征中,对应位置的特征,会被BatchNorm放到一起计算,对于1D,2D,和3D ,唯一的区别就是计算的时候,特征的维度。具体来说:
# 这里每一个特征维度是1维,尺寸为N
input(BatchNorm1D) : ( batch , num_features, 1*N)
# 这里每一个特征的维度是2维度,常用于图像,对应featrue map的长和宽
input(BatchNorm2D) : ( batch , num_features, width, height)
# 这里每一个特征的维度是3维度,常用语3位数据,可以理解为多个图像,
# 既num_of_wh个图像
input: (batch, num_features, width, height, num_of_wh)
Layer Normalization
Layer Normalization 主要是针对于1维变长序列数据,例如,在自然语言处理中,每一个batch中,句子的长度不一样,这个时候,Layer Normalization就可以用于这种情况,LayerNorm主要计算的是一个batch中,每一个句子自己去做计算,也就是说,每一个样本中,N个特征自己去计算均值和方差,而不是batch之间去计算。 对应于CNN的话,假设每个batch,有N个feature map,然后LayerNorm就是计算每个Batch里面,这个N个feature_map的均值和方差。
Pytorch中对应得LayerNorm函数如下:
nn.LayerNorm()
参数:
normalized_shape: 每一层的形状,也就是长度
eps: 分母修正项
elementwise_affine: 是否需要affine transform
LayerNorm 计算和BatchNorm计算基本一样,区别是,LayerNorm 不是跨batch进行计算的,因此,也就不再有running_mean 和 runing_var了。
在使用的时候,Layer需要注意的是,设置normalized_shape, 其实就是设置特征的尺寸,这个和BatchNorm不同,BatchNorm主要设置的是特征的个数。另外,这里的LayerNorm也可以处理不同维度特征,只需要设置特征的尺寸就可以了。具体使用方式如下:
# input 1D : (batch, seq_len, N) 主要针对序列数据,每句话长度为seq_len,维度为N,这个时候
# LayerNorm需要将normalized_shape设置成N
layer_norm = nn.LayerNorm((N),eps=0.0001,elementwise_affine=True)
# input2D : (batch, num, width, height) 主要针对图像数据,有num个feature map,
# 尺寸为(width, height)
layer_norm = nn.LayerNorm((width,height),eps=0.0001,elementwise_affine=True)
# input3D : (batch, num, width, height, num_of_wh)
layer_norm = nn.LayerNorm((width,height,num_of_wh),eps=0.0001,elementwise_affine=True)
Group Normalization
第三个是Group Normalization,这里的batch是2,所以估计的均值方差都很小,所以就可以考虑用特征来求均值方差,这个的gamma和beta还是对应于特征数
Group Normalization和LayerNorm比较相似,只不过,LayerNrom使用所有特征进行计算的,而Group是对特征进行分组计算。
pytorch中对应的函数,这里的num_channels对应的是特征数
nn.GroupNorm()
参数:
num_groups: 分组的个数
num_channels: 通道数,也可以理解为特征的个数
eps : 分母修正项
affine: 是否需要计算affine transform
需要注意的是,这里也不会计算running_mean 和 running_var.
Instance Normalization
Instance Normalization计算方式如下所示,每一个样本有三个特征,每一个特征自己去计算一个均值方差,所以称为instance Normalization,这个主要用于风格迁移任务中。从卷积网络的角度来理解,就是每一个feature map 自己单独计算均值和方差,这里需要注意的是,输入的参数和BatchNorm一样,也是输入特征数量,每一个特征单独计算的时候,也会加权之前对应位置特征的均值和方差。具体的用法和BatchNorm 一样。
nn.InstanceNorm()
参数:这和上面的BatchNorm参数是一样的
num_features: 样本中有多少特征
eps: 分母修正项
momentum: 指数加权计算均值方差
affine: 是否进行affine transofrm
track_running_stats: 是否重新计算均值方差。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号