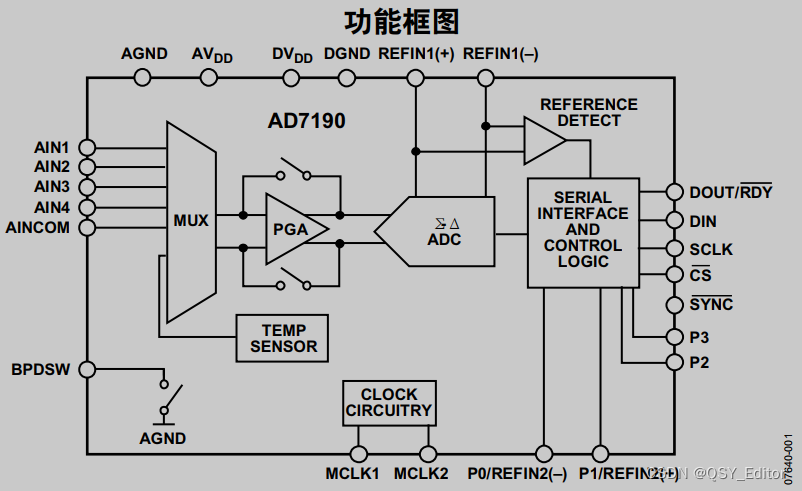
RT Thread中配置AD7190
![]()
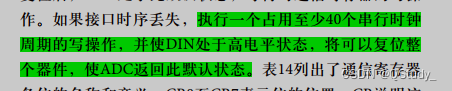
使用前先复位操作
1 SCL空闲时会高电平。
2复位:上电后连续输入40个1(时钟周期)复位到已知状态,并等待500us后才能访问串行接口,用于SCLK噪音导致的同步。
![]()
void AD7190_Reset(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 复位 */
struct rt_spi_message msg;
rt_uint8_t sendbuf[16]={0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF};
msg.send_buf = sendbuf;
msg.recv_buf = RT_NULL;
msg.length = 16;
msg.cs_take = 1;
msg.cs_release = 1;
msg.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg);
rt_thread_mdelay(10); // 必须延迟2ms以上,再进行ad7190操作
rt_kprintf("AD7190 reset ok\n");
}一、 特性
特性见手册
![]()
二、寄存器
1.通信寄存器
8位的只写寄存器,与AD7190的通信都必须以对通信寄存器的写操作开始。
通信寄存器决定写还是读操作,对哪个寄存器进行操作。
通过配置好通信寄存器后,对选定的寄存器进行操作完成后,会回到写通信寄存器的状态,也就是每配置一下指定的寄存器,如果下一次还想对其他包括刚配置的寄存器再进行配置,还是需要从写通信寄存器开始,这也是接口的默认状态。
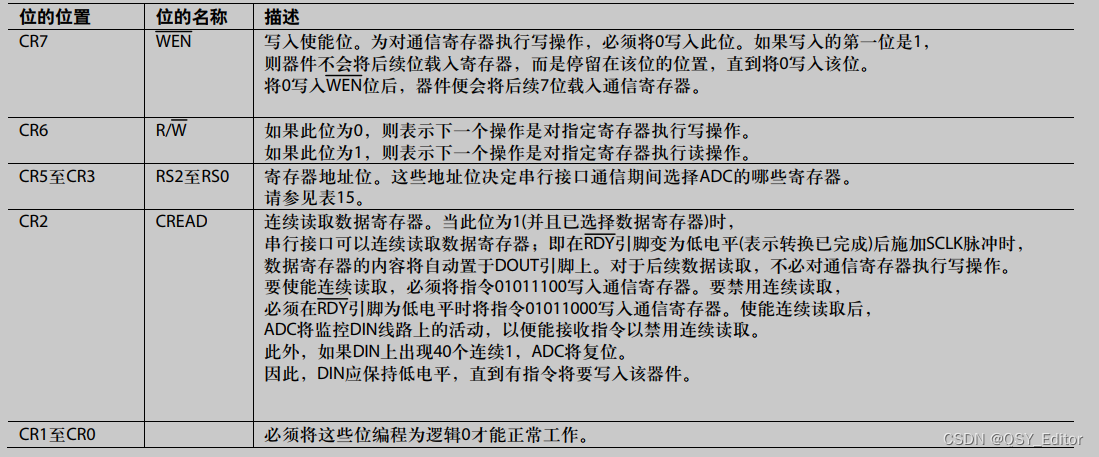
1)通信寄存器的8位

![]()
2)通信寄存器的各个名称和意义
![]()
3)(表15)寄存器的选择
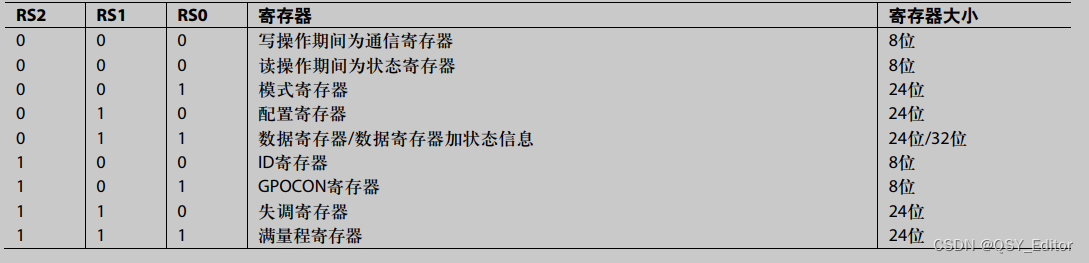
![]()
4)写入示例
7位:0 (必须,使能位)
6位:0 写 、1读
5-3位:100 (选择ID寄存器)其他见表15
2位:1 连续读寄存器
1-0位:00 (必须)
0101 1100 写入通信寄存器即可连续读数据寄存器,后续不必对通信寄存器进行写操作。
禁用连续读把2位写0就好。
void AD7190_ID_RD(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
//配置通信寄存器连续读命令
struct rt_spi_message msg1;
rt_uint8_t CommRegCMD = 0x5C; // 0101 1100 连续读
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = RTNULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ID REG: %x\n", ID_Reg);
}2.ADC状态寄存器
正常使用时没用到,可先不管 。
8位的只读寄存器。要访问 必须写通信寄存器,选择下一个操作为读操作,寄存器选择位为000。
1)状态寄存器的8个位

![]()
2)寄存器的各位的名称和意义
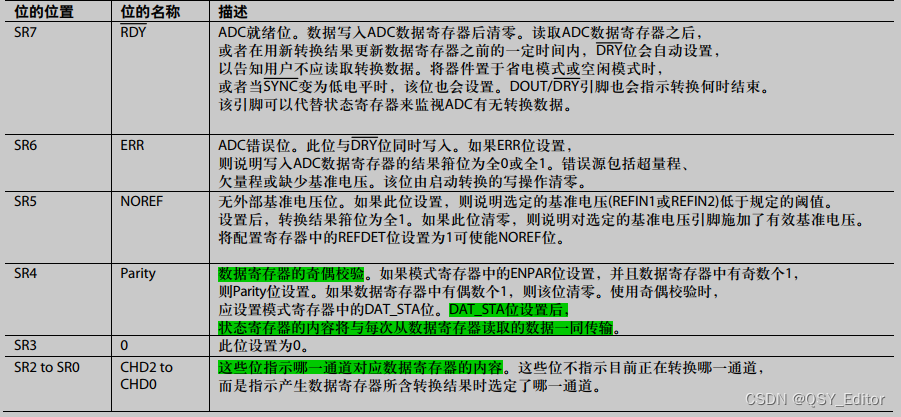
![]()
3.模式寄存器
模式寄存器,24位的可读 写寄存器。
功能:选择工作模式、输出速率、时钟源
1)模式寄存器的24位

![]()
2)寄存器的各个位的名称和意义

![]()
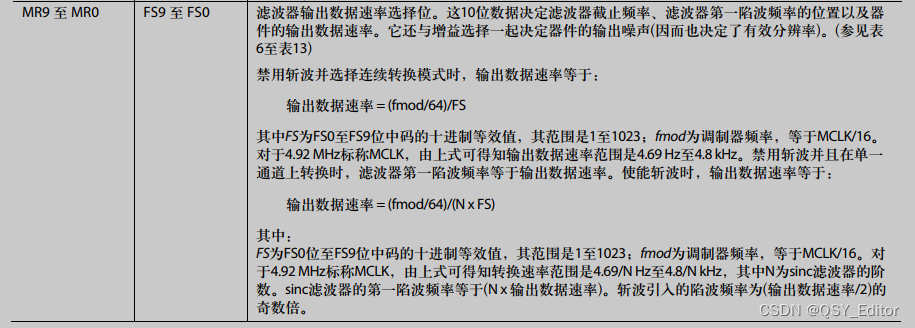
![]()
3)(表18)工作模式
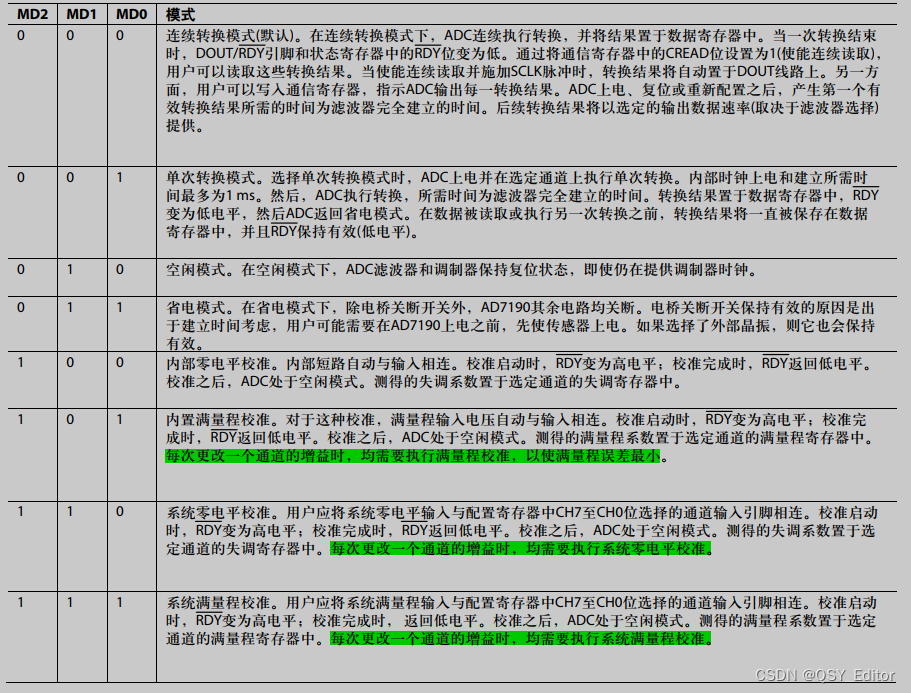
![]()
4)写入实例
23-21位:000 (连续转换) 模式选择位(表18) 还有 单次 、空闲、省电、校准 模式选择
20位:1 状态寄存器的内容在数据寄存器读操作之后传输,多通道可找到对应的通道与数据寄存器的值。0 就禁用
19-18位:10 (内部时钟4.92MHZ)选择时钟源
17-16位:00 (必须)
15位:0 滤波器选择
14位:0 (必须)
13位:0 (奇偶校验位) 用这个需要设置20位 1
12位:0 (必须)
11位:1 单周期转换使能位 (详细见上表)
10位:1 50/60MHZ抑制
9-0位:00 0000 0011 滤波器输出速率选择位
void AD7190_ModeReg_Set(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 操作模式选择寄存器 */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x08; //0000 1000 ModeReg 写入 命令, 其实就是通信寄存器写入 0X08,0x08,0x04,0x03
rt_uint8_t ModeReg[3] = {0x08, 0x04, 0x03}; //模式寄存器写入值0000 1000、0000 0100、0000 0011
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ModeReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ModeREG Set OK!\n");
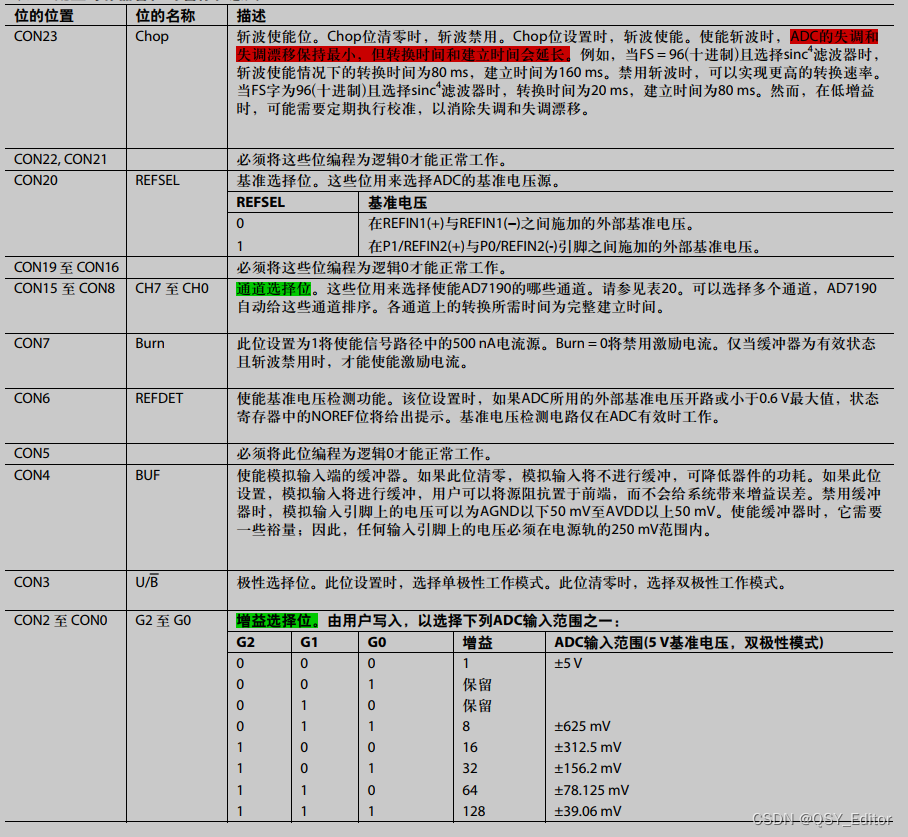
}4.配置寄存器
配置寄存器,24位的可读 写寄存器。
功能:ADC的单极性、双极性模式、使能或禁用缓冲器、使能或禁用激励电流、增益选择、模拟输入通道选择
1)配置寄存器的24位

![]()
2)配置寄存器各位的名称和意义
![]()
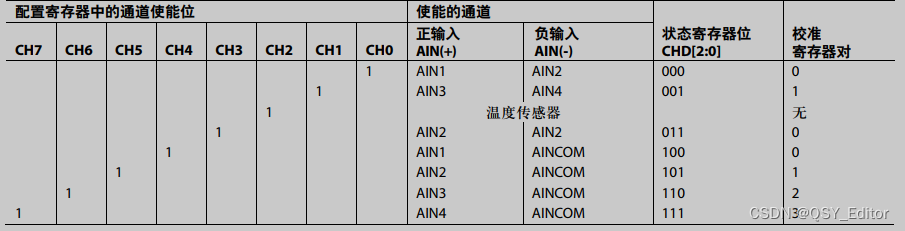
3)(表20)通道选择
![]()
4)写入实例
23位:1 斩波使能位
22-21位:00 (必须)
20位: 0 1 基准电压的输入选择
19-16位:0000 (必须)
15-8位:0x01\0x02 通道选择位
7位:0 激励电流 (1使用)
6位:0 基准电压检测(1使用)
5位:0 (必须)
4位:1 使能模拟端输入的缓冲器
3位:0 极性选择 0 双极性 1 单极性
2-0位:110 (64增效) 增益位选择
void AD7190_ConfigReg_Set(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 配置 配置寄存器*/
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x10; // ConfigReg 写入 命令, 其实就是通信寄存器写入 0001 0000
rt_uint8_t ConfigReg[3] = {0x80, 0x02, 0x16}; //配置寄存器写入 1000 0000、0000 0010、0001 0110 / 0x02通道选择位
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ConfigReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
// rt_kprintf("AD7190 ConfigREG Set OK!\n");
}5.数据寄存器
24位的只读寄存器,存储ADC的转换结果。
当模式寄存器中的DAT_STA位设置为1时,状态寄存器的内容将附加到各24位的转换结果上。状态寄存器的三个LSB(CHD2至CHD0)可确定转换结果的来源通道。
6.ID寄存器
8位的只读寄存器,存储着AD7190的识别码,即ID。
void AD7190_ID_RD(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x60; // ID_Reg_Read_CMD 命令, 其实就是通信寄存器写入 0110 0000
rt_uint8_t ID_Reg = 0x00;
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = &ID_Reg;
msg2.length = 1;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ID REG: %x\n", ID_Reg);
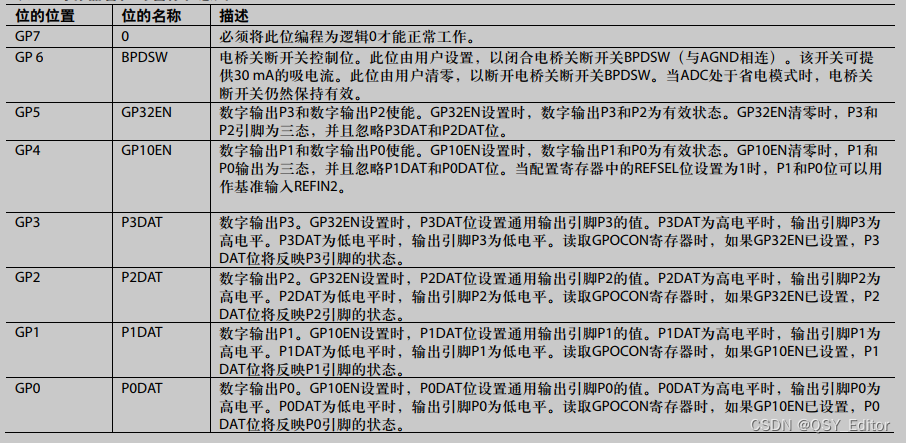
}7.GPOCON寄存器
8位的 读 写寄存器。
功能:使能 通用数字输出
1)GPOCON寄存器的8位

![]()
2)寄存器的各位名称和意义
![]()
3)输入实例
void AD7190_GPOCONReg_Set(rt_uint8_t bpsw)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x28; //0010 1000 ModeReg 写入 命令, 其实就是通信寄存器写入 0X08,0x08,0x04,0x03
rt_uint8_t GPOCONReg = 0x00 ; //GPOCON寄存器写入值
if( bpsw == 1)
GPOCONReg = 0x40; //电桥打开
else
GPOCONReg = 0x00;
// GPOCONReg = GPOCONReg | (bpsw << 2);
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = &GPOCONReg;
msg2.recv_buf = RT_NULL;
msg2.length = 1;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 GPOCON Set OK!\n");
}8.失调寄存器
保存adc的失调校准系数
9.满量程寄存器
保存adc的满量程校准系数
10.使用案例
AD7190.h
#ifndef HARDWARE_AD7190_H_
#define HARDWARE_AD7190_H_
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#define AD7190_BPSW_ON 1 // 电桥打开
#define AD7190_BPSW_OFF 0
///-------------------------------------------------------
void AD7190_ID_RD(void);
void AD7190_Reset(void);
void AD7190_ConfigReg_Set(void);
void AD7190_ConfigReg_Read(void);
void AD7190_ConfigReg_Switch(void);
void AD7190_ModeReg_Set(void);
void AD7190_ModeReg_Read(void);
void AD7190_GPOCONReg_Set(rt_uint8_t bpsw);
void AD7190_Init(void);
rt_uint32_t AD7190_DataReg_RD(void);
#endif /* HARDWARE_AD7190_H_ */AD7190.c
#ifndef HARDWARE_AD7190_C_
#define HARDWARE_AD7190_C_
#include <AD7190.h>
#define AD7190_SPI_DEVICE_NAME "spi10" /* SPI 设备名称 */ // 和myspi.c里面驱动一致
struct rt_spi_device *spi_dev_ad7190; /* SPI 设备句柄 */
//初始复位
void AD7190_Reset(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 复位 */
struct rt_spi_message msg;
rt_uint8_t sendbuf[16]={0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF};
msg.send_buf = sendbuf;
msg.recv_buf = RT_NULL;
msg.length = 16;
msg.cs_take = 1;
msg.cs_release = 1;
msg.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg);
rt_thread_mdelay(10); // 必须延迟2ms以上,再进行ad7190操作
rt_kprintf("AD7190 reset ok\n");
}
//读取ID值
void AD7190_ID_RD(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x60; // ID_Reg_Read_CMD 命令, 通信寄存器写入 0110 0000
rt_uint8_t ID_Reg = 0x00;
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = &ID_Reg;
msg2.length = 1;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ID REG: %x\n", ID_Reg);
}
//设置配置寄存器
void AD7190_ConfigReg_Set(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x10; // ConfigReg 写入 命令, 通信寄存器写入 0001 0000
rt_uint8_t ConfigReg[3] = {0x80, 0x02, 0x16}; //配置寄存器写入 1000 0000、0000 0010、0001 0110 / 0x02通道选择位
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ConfigReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
// rt_kprintf("AD7190 ConfigREG Set OK!\n");
}
//配置寄存器更换通道
void AD7190_ConfigReg_Switch(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x10; // ConfigReg 写入 命令0001 0000
rt_uint8_t ConfigReg[3] = {0x80, 0x01, 0x17}; //配置寄存器写入 1000 0000、0000 0001、0001 0111 / 0x01通道选择位 128增益
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ConfigReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
// rt_kprintf("AD7190 ConfigREG Set OK!\n");
}
//读取配置信息
void AD7190_ConfigReg_Read(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x50; // ConfigReg 写入 命令 | 0x40, 次高位写1,读取 0101 0000
rt_uint8_t ConfigReg[3] ;
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = ConfigReg;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ConfigREG read: %02X,%02X,%02X\n",ConfigReg[0] ,ConfigReg[1] ,ConfigReg[2] );
}
//设置模式寄存器
void AD7190_ModeReg_Set(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 操作模式选择寄存器 */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x08; //0000 1000 ModeReg 写入 命令0X08,0x08,0x04,0x03
rt_uint8_t ModeReg[3] = {0x08, 0x04, 0x03}; //模式寄存器写入值0000 1000、0000 0100、0000 0011
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ModeReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ModeREG Set OK!\n");
}
//校准
//calibration校准 内部零电平校准 0x88、内置满量程校准0xA8、系统零电平校准0xC8、系统满量程校准0xE8
void AD7190_Calibration(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x08; //0000 1000 ModeReg 写入 命令0X08,0x08,0x04,0x03
rt_uint8_t ModeReg[3] = {0x88, 0x04, 0x03}; //模式寄存器写入值0000 1000、0000 0100、0000 0011
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = ModeReg;
msg2.recv_buf = RT_NULL;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ModeREG Set OK!\n");
}
//模式寄存器读取
void AD7190_ModeReg_Read(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x48; // 0100 1000 ModeReg 写入 命令 0X08,0x08,0x04,0x03
rt_uint8_t ModeReg[3];
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = ModeReg;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 ModeREG read: %02X,%02X,%02X\n",ModeReg[0] ,ModeReg[1] ,ModeReg[2] );
}
//设置模式寄存器
void AD7190_GPOCONReg_Set(rt_uint8_t bpsw)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x28; //0010 1000
rt_uint8_t GPOCONReg = 0x00 ; //GPOCON寄存器写入值
if( bpsw == 1)
GPOCONReg = 0x40; //电桥打开
else
GPOCONReg = 0x00;
// GPOCONReg = GPOCONReg | (bpsw << 2);
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = &GPOCONReg;
msg2.recv_buf = RT_NULL;
msg2.length = 1;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
rt_kprintf("AD7190 GPOCON Set OK!\n");
}
//AD7190初始化
void AD7190_Init(void)
{
AD7190_Reset(); //复位
AD7190_ID_RD(); //ID寄存器
AD7190_ConfigReg_Set(); //配置寄存器
AD7190_Calibration(); //校准
AD7190_ModeReg_Set(); //模式寄存器
AD7190_GPOCONReg_Set(AD7190_BPSW_ON); //GPOCON寄存器(使能通用数字输出)
}
//读取AD7190的数据寄存器
rt_uint32_t AD7190_DataReg_RD(void)
{
spi_dev_ad7190 = (struct rt_spi_device *)rt_device_find(AD7190_SPI_DEVICE_NAME); //
/* 发送命令读取ID */
struct rt_spi_message msg1, msg2;
rt_uint8_t CommRegCMD = 0x58; //0101 1000 DATAReg 读取 命令
rt_uint8_t DataReg[3];
rt_uint32_t lw_ADC_value;
msg1.send_buf = &CommRegCMD;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = DataReg;
msg2.length = 3;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_ad7190, &msg1);
// rt_kprintf("AD7190 DataREG read: %02X,%02X,%02X\n",DataReg[0] ,DataReg[1] ,DataReg[2] );
lw_ADC_value = ( (rt_uint32_t)DataReg[0] <<16 ) + ( (rt_uint32_t)DataReg[1] << 8) + (rt_uint32_t)DataReg[2];
//rt_kprintf("ADC=%d\n",lw_ADC_value);
return lw_ADC_value;
}
//=====================------------------------------
#endif /* HARDWARE_AD7190_C_ */

 浙公网安备 33010602011771号
浙公网安备 33010602011771号