NanoFramework操作ESP32(一)_基础元器件篇(三十五)_ KY-040编码器
1.NanoFramework操作ESP32(目录)_目录2.NanoFramework操作ESP32(一)_基础元器件篇(一)_安装环境3.NanoFramework操作ESP32(一)_基础元器件篇(二)_第一个示例程序4.NanoFramework操作ESP32(一)_基础元器件篇(三)_单色灯(F3 单色LED_常亮 Boot按钮控制 呼吸灯)5.NanoFramework操作ESP32(一)_基础元器件篇(四)_跑马灯与呼吸灯(三色LED)6.NanoFramework操作ESP32(一)_基础元器件篇(五)_超声波测距(HC-SR04超声波传感器)7.NanoFramework操作ESP32(一)_基础元器件篇(九)_双色屏(0.96寸OLED显示屏_IIC接口SSD1306驱动)8.NanoFramework操作ESP32(一)_基础元器件篇(十三)_ HC_SR501人体红外传感器9.NanoFramework操作ESP32(一)_基础元器件篇(十四)_ KY-032红外避障模块(光电反射传感器)10.NanoFramework操作ESP32(一)_基础元器件篇(十七)_ KY-019继电器(1路5V继电器)11.NanoFramework操作ESP32(一)_基础元器件篇(二十)_ KY-008激光头传感器12.NanoFramework操作ESP32(一)_基础元器件篇(二十一)_ 声音传感器13.NanoFramework操作ESP32(一)_基础元器件篇(二十二)_ DHT11温湿度传感器14.NanoFramework操作ESP32(一)_基础元器件篇(二十三)_ 土壤湿度传感器15.NanoFramework操作ESP32(一)_基础元器件篇(二十五)_ KY-018光敏传感器16.NanoFramework操作ESP32(一)_基础元器件篇(二十六)_ KY-028热敏传感器(数字温度)17.NanoFramework操作ESP32(一)_基础元器件篇(二十七)_ 气体质量、可燃气体、烟雾检测传感器18.NanoFramework操作ESP32(一)_基础元器件篇(二十八)_ KY-026火焰传感器19.NanoFramework操作ESP32(一)_基础元器件篇(二十九)_ 雨滴传感器20.NanoFramework操作ESP32(一)_基础元器件篇(三十)_ KY-036人体触摸传感器21.NanoFramework操作ESP32(一)_基础元器件篇(三十一)_ MPU6050陀螺仪模块22.NanoFramework操作ESP32(一)_基础元器件篇(三十二)_ KY-002震动传感器23.NanoFramework操作ESP32(一)_基础元器件篇(三十三)_ KY-020倾斜开关
24.NanoFramework操作ESP32(一)_基础元器件篇(三十五)_ KY-040编码器
25.NanoFramework操作ESP32(一)_基础元器件篇(三十六)_ KY-023 PS2摇杆26.NanoFramework操作ESP32(一)_基础元器件篇(三十七)_ SD读卡器模块27.NanoFramework操作ESP32(一)_基础元器件篇(三十八)_ RTC与DS1302时钟模块28.NanoFramework操作ESP32(一)_基础元器件篇(三十九)_ KY-033红外寻迹模块(TCRT5000)29.NanoFramework操作ESP32(一)_基础元器件篇(四十)_ KY-025干簧管传感器30.NanoFramework操作ESP32(一)_基础元器件篇(四十一)_ KY-024线性霍尔传感器31.NanoFramework操作ESP32(一)_基础元器件篇(四十二)_ KY-031敲击传感器32.NanoFramework操作ESP32(一)_基础元器件篇(四十三)_ KY-010光遮断传感器33.NanoFramework操作ESP32(二)_网络协议篇(一)_ Wifi34.NanoFramework操作ESP32(二)_网络协议篇(五)_ 串口协议一、元器件介绍
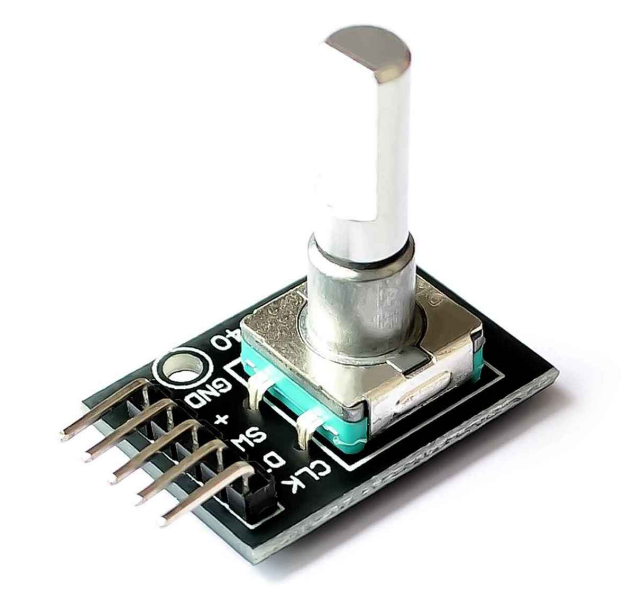
旋转编码器(增量式编码器)可通过旋转可以计数正方向和反方向转动过程中输出脉冲的次数,旋转计数不像电位计,这种转动计数是没有限制的。配合旋转编码器上的按键,可以复位到初始状态,即从0开始计数。旋转编码器目前被广泛的应用在数控机床、印刷设备、包装机械、输送带、电梯、机器人、风力发电、起重机、家用电器等领域,主要用于频率调节、速度调节、高度调节、温度调节及音量调节等的参数控制。
- 旋转编码器是一种位置传感器,它将旋钮的角位置(旋转)转换为输出信号,可用于确定旋钮的转动方向。
- 旋转编码器分为绝对式和增量式两种。绝对编码器报告旋钮的精确位置(以度为单位),而增量编码器报告轴移动的增量数。
- 旋转编码器是电位器的现代数字等效物,并且用途更广泛。旋转编码器可以不停地旋转360°,而电位器只能旋转3/4圈。电位器用于需要知道旋钮准确位置的情况。
1、旋转编码器如何工作?
编码器内部有一个开槽圆盘,连接到公共接地引脚 C。它还具有两个接触针 A 和 B,如下所示。
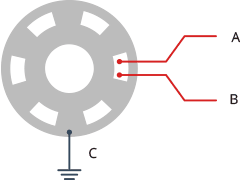
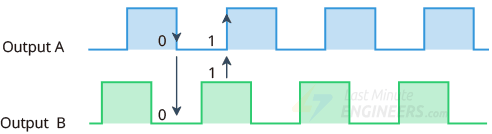
当您转动旋钮时,A 和 B 按照特定顺序与公共接地引脚 C 接触,具体顺序取决于转动旋钮的方向。当它们与公共地接触时,会产生两个信号。这些信号存在 90° 异相,因为一个引脚先于另一个引脚接触公共地。它被称为正交编码。
当顺时针旋转旋钮时,A 引脚先于 B 引脚接地。当逆时针旋转旋钮时,B 引脚先于 A 引脚接地。通过监控每个引脚何时连接或断开接地,我们可以确定旋钮旋转的方向。这可以通过简单地观察 A 的状态改变时 B 的状态来完成。
当A改变状态时:
如果 B != A,则顺时针转动旋钮。
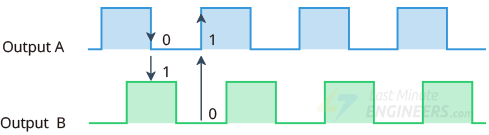
如果 B = A,则逆时针转动旋钮。
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。原文链接:https://blog.csdn.net/sxstj/article/details/132244808
2、针脚用途
| 编号 | 名称 | 功能 |
| 1 | CLK | 脉冲信号输出A |
| 2 | DT | 脉冲信号输出B |
| 3 | SW | 中间按键状态 |
| 4 | + | 电源正极 |
| 5 | GND | 电源负极 |
二、示例代码
1、代码:
| 元器件的针脚 | ESP32模块的针脚 |
| CLK;脉冲信号输出A | IO23 |
| DT;脉冲信号输出B | IO22 |
| SW;中间按键状态 | IO21 |
| +;电源正极 | 5V |
| GND;电源负极 | GND |

参照代码:https://blog.csdn.net/sxstj/article/details/132244808(修改了点),修改后封装的的方法如下:
#region KY-040编码器
RotaryEncoder rotaryEncoder1 = new RotaryEncoder();
rotaryEncoder1.RotaryEncoderRunDemo();
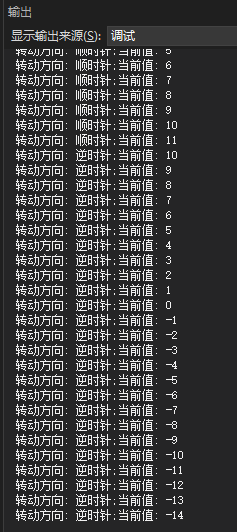
#endregion KY-040编码器2、结果:
本文来自博客园,作者:꧁执笔小白꧂,转载请注明原文链接:https://www.cnblogs.com/qq2806933146xiaobai/p/18032668
分类:
C#+单片机ESP32系列


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· 一文读懂知识蒸馏
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
2021-02-25 Unity报错-UnityEditor.BuildPlayerWindow+BuildMethodException: 2 errors
2021-02-25 Unity报错-【Unity 3D】Because you are not a member of this project this build will not access Unity services.
2021-02-25 Unity错误-(Android build error) Can not sign application Unable to sign application; please provide passwords!