

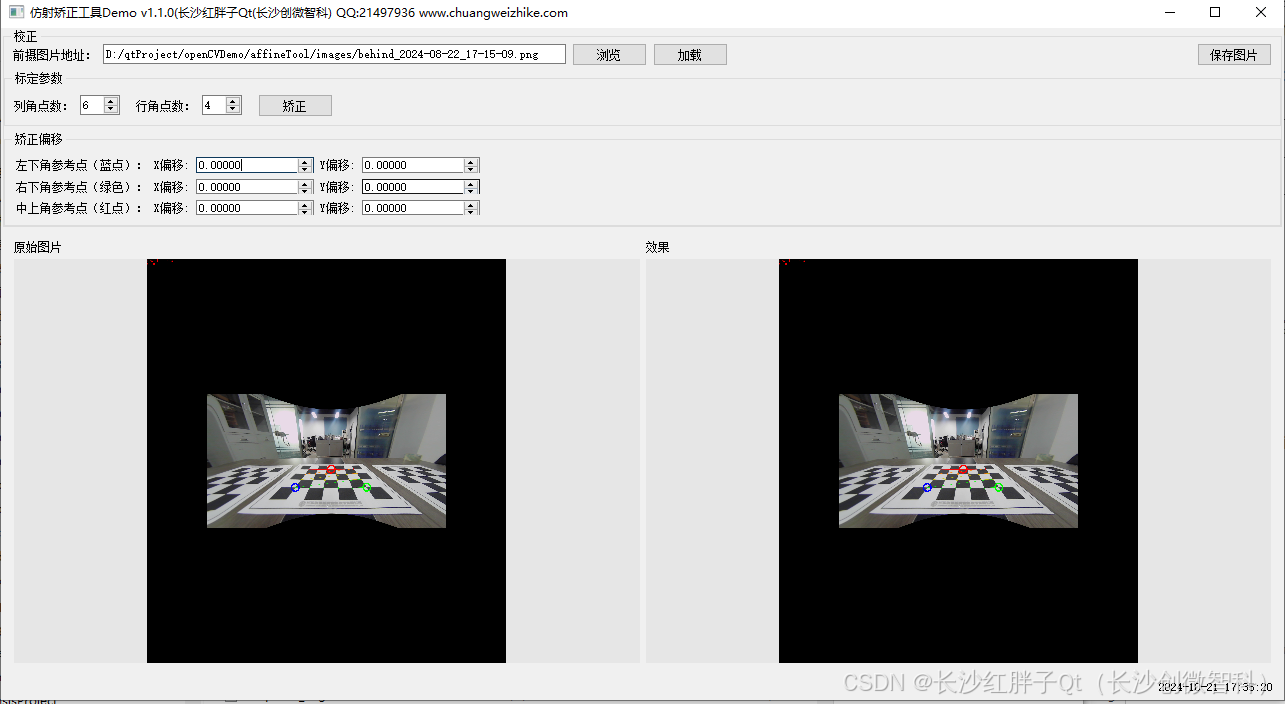
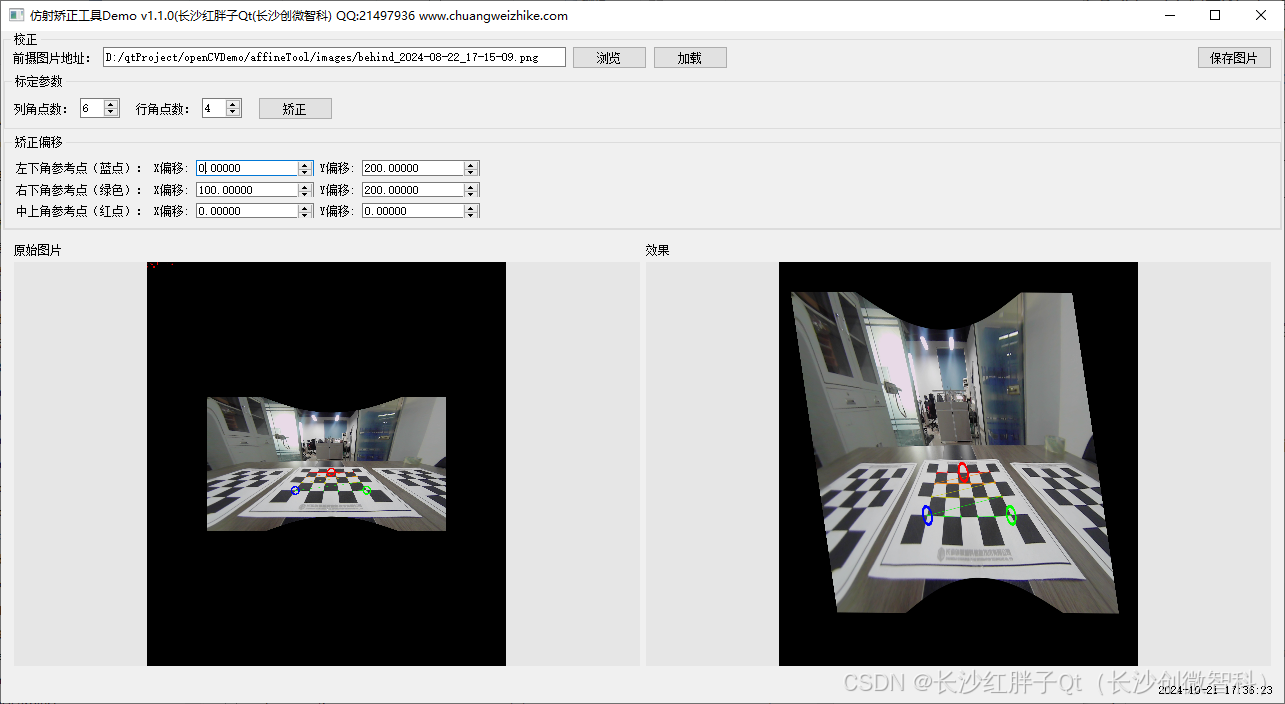
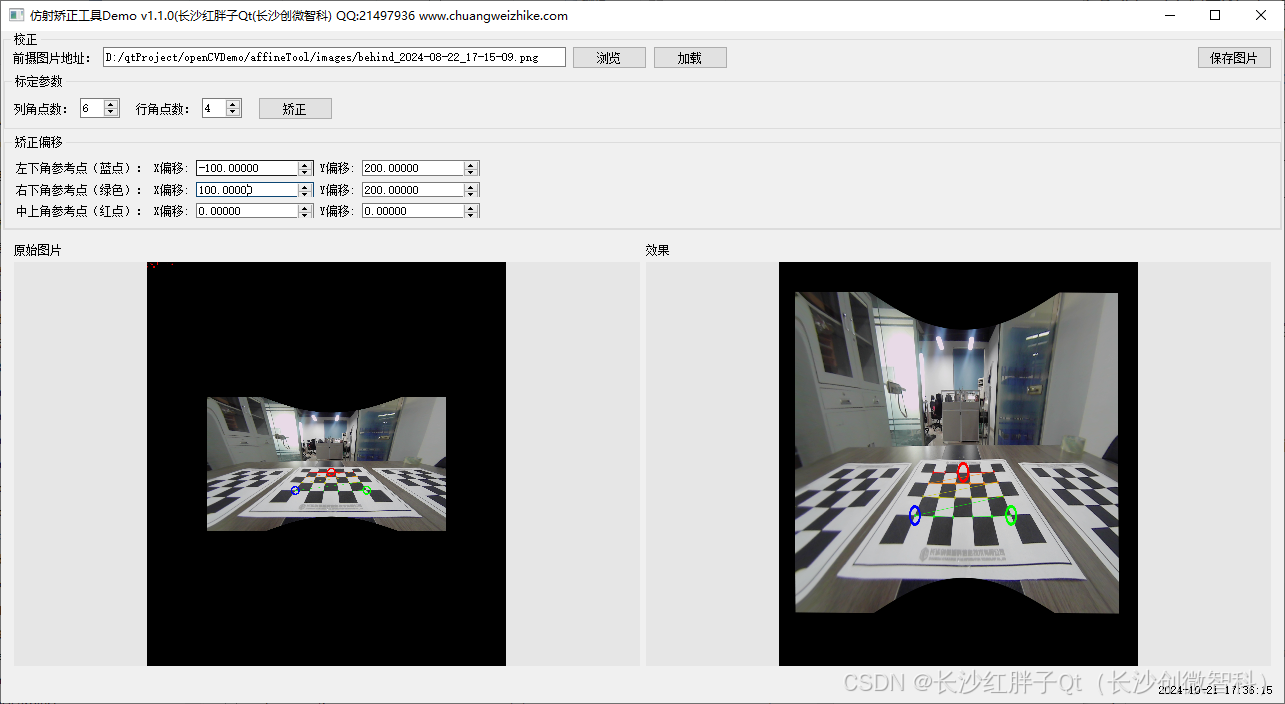
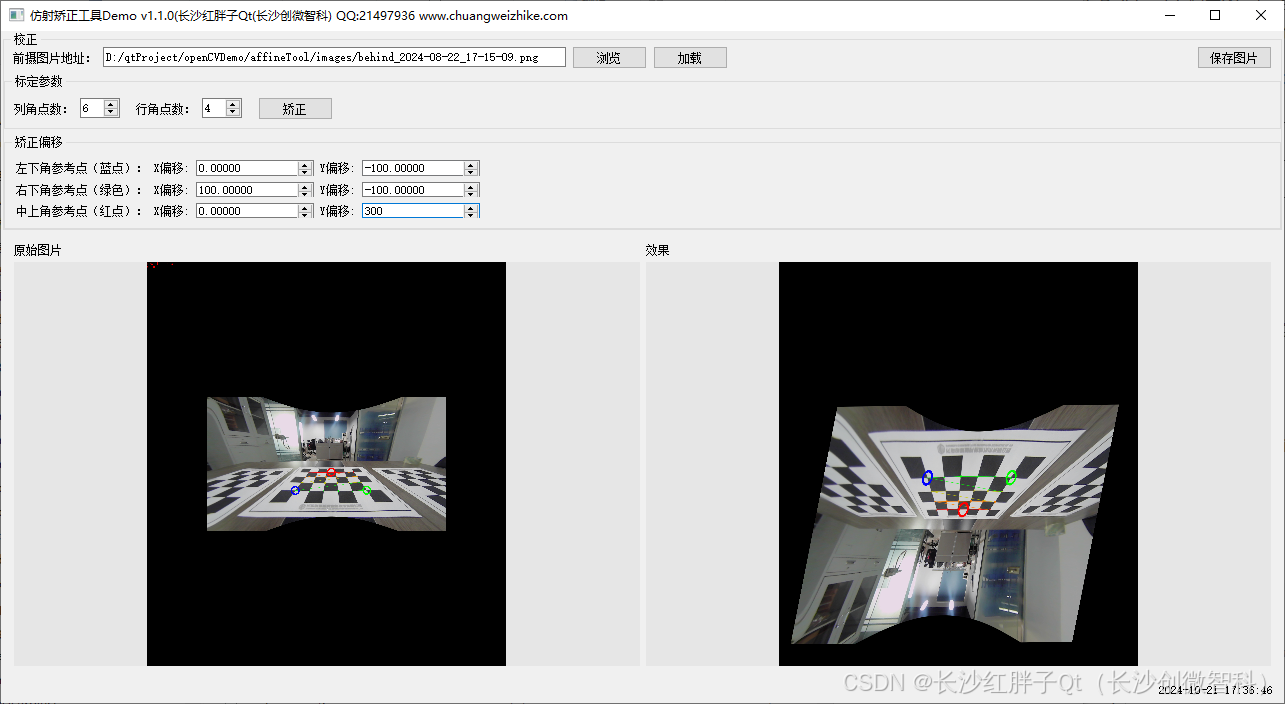
项目实战:Qt+OpenCV仿射变换工具v1.1.0(支持打开图片、输出棋盘角点、调整偏移点、导出变换后的图等等)
需求
1.打开图片;
2.矫正识别角点;
3.opencv摄像头操作子线程处理;
4.支持设置棋盘格的行列角点数;
深入研究图像拼接细分支算法,产出的效果查看工具,验证算法单步思路。
《项目实战:Qt+Opencv相机标定工具v1.3.0(支持打开摄像头、视频文件和网络地址,支持标定过程查看、删除和动态评价误差率,支持追加标定等等)》
《OpenCV开发笔记(〇):使用mingw530_32编译openCV3.4.1源码,搭建Qt5.9.3的openCV开发环境》
《OpenCV开发笔记(三):OpenCV图像的概念和基本操作》
《OpenCV开发笔记(四):OpenCV图片和视频数据的读取与存储》
《OpenCV开发笔记(六):OpenCV基础数据结构、颜色转换函数和颜色空间》
《OpenCV开发笔记(四十六):红胖子8分钟带你深入了解仿射变化(图文并茂+浅显易懂+程序源码)》
《OpenCV开发笔记(七十六):相机标定(一):识别棋盘并绘制角点》
《OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像》

#ifndef AFFINEMANAGER_H
#define AFFINEMANAGER_H
// opencv
#include "opencv/highgui.h"
#include "opencv/cxcore.h"
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
#include "opencv2/xphoto.hpp"
#include "opencv2/dnn/dnn.hpp"
// opencv_contrib
#include <opencv2/xphoto.hpp>
#include <opencv2/ximgproc.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/features2d.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <opencv2/xfeatures2d/nonfree.hpp>
#include "cvui.h"
#include <QImage>
#include <QTimer>
class AffineManager: public QObject
{
Q_OBJECT
public:
explicit AffineManager(QObject *parent = 0);
~AffineManager();
public slots:
void testOpencvEnv(); // 测试环境
public:
cv::Point2f getLeftBottomOffsetPoint() const;
cv::Point2f getCenterTopOffsetPoint() const;
cv::Point2f getRightBottomOffsetPoint() const;
int getChessboardColCornerCount() const;
int getChessboardRowCornerCount() const;
public:
void setLeftBottomOffsetPoint(const cv::Point2f &offsetPoint);
void setRightBottomOffsetPoint(const cv::Point2f &offsetPoint);
void setCenterTopOffsetPoint(const cv::Point2f &offsetPoint);
void setChessboardColCornerCount(int chessboardColCornerCount);
void setChessboardRowCornerCount(int chessboardRowCornerCount);
signals:
void signal_srcImage(QImage image);
void signal_srcImage(cv::Mat mat);
void signal_resultImage(QImage image);
void signal_resultImage(cv::Mat mat);
void signal_inited(bool result);
public slots:
void slot_openImage(QString filePath);
void slot_initImage();
void slot_affineImage();
protected:
void initControl();
protected:
bool findChessboard(int rowCornerCount, int colCornerCount, cv::Mat &mat, std::vector<cv::Point2f> &vectorPoint2fCorners);
public:
static QImage mat2Image(cv::Mat mat); // cv::Mat 转 QImage
private:
cv::Mat _mat; // 缓存一帧
cv::Mat _resultMat; // 结果
int _chessboardColCornerCount; // 一列多少个角点
int _chessboardRowCornerCount; // 一行多少个角点
private: // 计算内参和畸变系数
cv::Mat _cameraMatrix; // 相机矩阵(接收输出)
cv::Mat _distCoeffs; // 畸变系数(接收输出)
std::vector<cv::Mat> _rotate; // 旋转量(接收输出)
std::vector<cv::Mat> _translate; // 偏移量(接收输出)
cv::Point2f _leftBottomPoint; // 仿射三点,对应原始
cv::Point2f _rightBottomPoint;// 仿射三点,对应原始
cv::Point2f _centerTopPoint; // 仿射三点,对应原始
cv::Point2f _leftBottomOffsetPoint; // 仿射三点,对应偏移
cv::Point2f _rightBottomOffsetPoint;// 仿射三点,对应偏移
cv::Point2f _centerTopOffsetPoint; // 仿射三点,对应偏移
};
#endif // AffineManager_H
...
void AffineManager::slot_affineImage()
{
cv::Point2f srcTraingle[3];
cv::Point2f dstTraingle[3];
srcTraingle[0] = _leftBottomPoint;
srcTraingle[1] = _rightBottomPoint;
srcTraingle[2] = _centerTopPoint;
dstTraingle[0] = _leftBottomPoint + _leftBottomOffsetPoint;
dstTraingle[1] = _rightBottomPoint + _rightBottomOffsetPoint;
dstTraingle[2] = _centerTopPoint + _centerTopOffsetPoint;
cv::Mat mat = cv::getAffineTransform(srcTraingle, dstTraingle);
std::cout << srcTraingle[0] << srcTraingle[1] << srcTraingle[2] << endl;
std::cout << dstTraingle[0] << dstTraingle[1] << dstTraingle[2] << endl;
cv::warpAffine(_mat, _resultMat, mat, cv::Size(_mat.cols, _mat.rows));
QImage image = mat2Image(_resultMat);
emit signal_resultImage(image);
}
...
算法的研究优化过程中,思路需要开拓编写代码,查看效果,逐步研究出算法的优化路径,坑多暂时未记录。

