机器学习技法(林轩田)学习笔记:Lecture 9 & Lecture 10
Lecture 9: Decision Tree
Decision Tree Hypothesis
之前介绍的uniform blending和linear blending等,\(G\)中每个假设函数\(g_t\)前的权重都是一个常数\(\alpha_t\)(\(G(x)=\sum_{t=1}^T \alpha_t g_t(x)\)),下面介绍的决策树的假设函数G中,每个\(g_t\)前的权重是关于\(x\)的函数\(q_t(x)\)
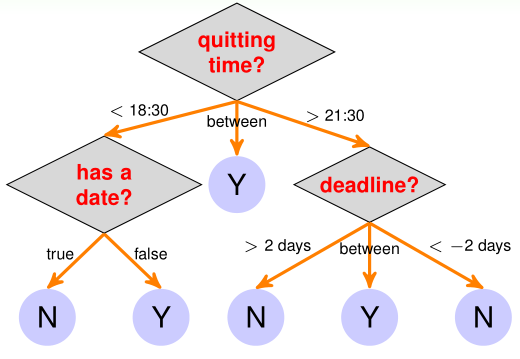
一个决策树如上图所示,可见决策树其实就是模仿人类做决策的判断过程。每个叶节点是一个假设函数\(g_t(x)\)(图中\(g_t(x)\)的取值就是0/1),对应的权重\(q_t(x)=\) 1{x在根节点到叶节点(\(g_t(x)\))的路径上},一般决策树的内部结点(非叶结点)都是比较简单的条件
决策树的假设函数\(G(x)\)的形式如下:

从递归的角度看,决策树的假设函数\(G(x)\)还可以定义为:
\(1\{b(x)=c\}\)这个权重就是用来根据条件b判断向哪个子树走
决策树的优点:
- 假设函数G具有可解释性,是人类可以理解的。
- 容易实现
- 训练、预测非常高效
决策树的缺点
- 缺乏足够的理论支持
- 新手很难选取合适的树结构
- 没有具有代表性的算法
Decision Tree Algorithm
根据决策树的假设函数\(G(x)\)的递归定义
我们可以写出决策树的伪代码:
function DecisionTree(训练集\(\mathcal D=\{(x_n,y_n)\}_{n=1}^N\))
- 如果\(\mathcal D\)达到终止条件:
- ____返回基假设函数\(g_t(x)\)
- 否则:
- ____学习分枝条件\(b(x)\)
- ____根据\(b(x)\)将\(\mathcal D\)分成C个子集\(\mathcal D_c\)
- ____对C个子集\(\mathcal D_c\)建立C个子树$G_c\gets \(DecisionTree(\)\mathcal D_c$)
- 返回\(G(x)=\sum_{c\ is\ x's\ son}1\{b(x)=c\}G_c(x)\)
C&RT决策树
下面介绍一种用于分类和回归的决策树:C&RT(Classification and Regression Tree),其参数:
- C=2(C&RT是二叉树)
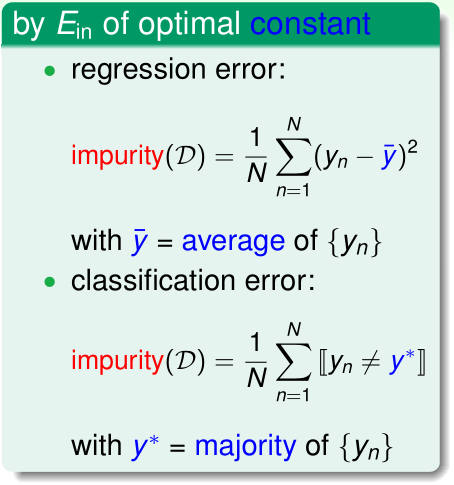
- 基假设函数\(g_t(x)\)是常数,为了满足\(E_{in}\)尽可能小:
-
- 对于二分类/多分类问题,\(g_t(x)=\)该叶节点对应的训练样本中占多数的标签\(y_n\)
-
- 对于平方误差的回归问题,\(g_t(x)=\)该叶节点对应的训练样本的\(y_n\)的平均值
C&RT的分枝条件学习
在C&RT中,每个内部结点的条件b(x)就是一个decision stump函数\(h(x)\),它把当前子树对应的训练样本\(\mathcal D\)分成两部分\(\mathcal D_1,\mathcal D_2\),使得这两部分各自的不纯度(impurity)之和最小,即:

根据回归/分类问题的原始的\(E_{in}\),我们可以推出它们对应的impurity函数:
对于分类问题,我们还有两种不同的impurity函数:
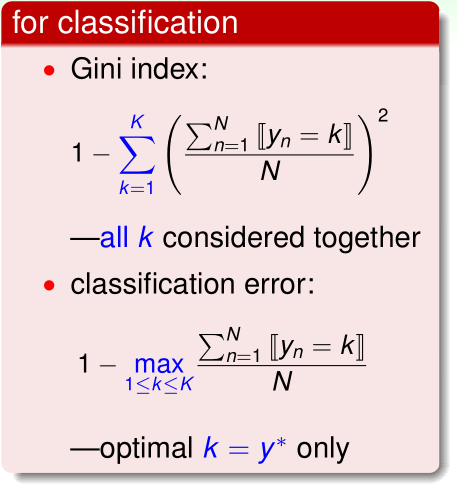
在分类问题的C&RT中最常用的impurity是Gini index,而在回归问题的C&RT中最常用的impurity是均方误差
C&RT的递归终止条件
在以下两种情况下,C&RT的递归终止:
- 1、当前的所有训练样本的\(y_n\)完全相同(impurity=0),此时返回\(g_t=y_n\)
- 2、当前的所有训练样本的\(x_n\)完全相同(样本点重叠了),decision stump没办法"下刀"
为方便描述,我们称以上构造出的C&RT是fully-grown tree
Decision Tree Heuristics in C&RT
Regularization by Pruning
之前介绍的fully-grown tree的C&RT,当所有\(x_n\)都不同时,可以保证\(E_{in}(G)=0\)
但是由于当递归到很深的层(很深的树结点)时,对应的训练集\(\mathcal D\)会很小,此时\(E_{out},E_{in}\)的gap很大,也就很容易发生过拟合了
为了解决这个问题,我们需要对C&RT引入正则化,正则化项\(\Omega(G)=\)G的叶结点数
那么我们希望得到的决策树G应该是:

加入正则化后的C&RT被称为pruned decision tree(被修剪过的决策树)
显然我们是无法枚举所有的\(G\)的,一种比较好的近似方法是:
- \(G^{(0)}=\)fully-grown gree
- \(G^{(i)}=\arg\min_GE_{in}\)(从\(G^{(i-1)}\)移掉一个叶节点后得到的树G)
选取正则化项的系数\(\lambda\)的过程也是模型选择过程,需要采用交叉验证的方法
Branching on Categorical Features
之前我们接触过的输入特征都是数值特征(numerical features),即输入的每一维特征都是实数,那么如果输入的某一维特征是分类特征(categorical feature),如\(x_i\in\) {fever, pain, tired, sweaty},该怎么办呢?
此时C&RT每个内部结点的条件\(b(x)\)相应地变成了:
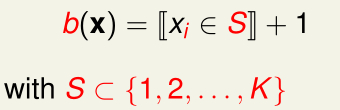
(即,输入的第i个特征(分类特征)\(\in S\)就走第二个子树,否则走第一个子树)
Missing Features by Surrogate Branch
在实际场景中,往往输入特征中某些维度是缺失的,其他学习算法是无法解决这类缺失特征的问题的,而决策树却可以通过surrogate branch解决这类问题。
surrogate branch就是用其他内部结点的分枝条件代替缺失特征的内部结点的条件,比如当前内部结点的分枝条件是{"体重"<=50kg},我们可以用另一个内部结点的分枝条件:{"身高"<=阈值} 来代替{"体重"<=50kg}
我们在训练决策树时,需要维护与每个条件\(b(x)\)最相似的备用条件\(b'(x)\),当\(b(x)\)作判断时需要的那一维特征缺失时,就用备用条件\(b'(x)\)替换
总结
C&RT有以下优点:
- 1、假设函数G是人类可以理解的
- 2、可以轻松实现多分类
- 3、可以轻松实现输入categorical feature
- 4、可以轻松解决缺失某些维度特征的情况
- 5、对非线性问题的训练和预测非常高效
Lecture 10: Random Forest
Random Forest Algorithm
Recall: Bagging and Decision Tree
首先回顾一下bagging和决策树:
- bagging通过从\(\mathcal D\) re-sample采样来得到T个\(\tilde{\mathcal D_t}\),并分别用每个\(\tilde{\mathcal D_t}\)作训练集,使用相同的学习算法\(\mathcal A\)训练出假设函数\(g_t\),最终通过对T个\(g_t\)的uniform blending获得G,bagging通过结合T个\(g_t\),可以减小G的方差
- 决策树,特别是fully-grown tree,非常容易过拟合(方差大)
随机森林的motivation就是在保留决策树的一系列优点的前提下,通过bagging的方法减小它的方差
Random Forest (RF)
随机森林,其实就是套用bagging算法,其中bagging的学习算法\(\mathcal A\)就是决策树算法,另外bootstraping的过程也有变化
function Random Forest(\(\mathcal D\))
- For t=1,...,T:
- (1)通过bootstraping获得大小为N'的训练集\(\tilde{\mathcal D_t}\)
- (2)使用决策树算法,用训练集\(\tilde{\mathcal D_t}\)训练出\(g_t\)
- 最终得到的G=T个\(g_t\)的uniform blending
其中,bootstrap过程可以是通过原始的\(\mathcal D\) re-sample N'次得到,为了让\(g_t\)更具有多样性,还有另外一种方法:
假设原始的输入特征是d维的,我们选取其中的d'个维度(第\(i_1,\cdots,i_{d'}\)维,\(d'\ll d\)),通过某种随机的线性变换\(\Phi(x)=Px\)映射为新的低维特征(其中\(P\)是\(d'\times d\)列,除第\(i_1,\cdots,i_{d'}\)列外,其他列都是零)
除此以外,为了让\(g_t\)更具有多样性,C&RT的作者建议在每次获得决策树内部结点的分枝条件\(b(x)\)时,都使用一个新的随机\(\Phi(x)\)
Out-Of-Bag Estimate
我们来看bagging(包括随机森林),T个\(g_t\)使用训练样本的情况:
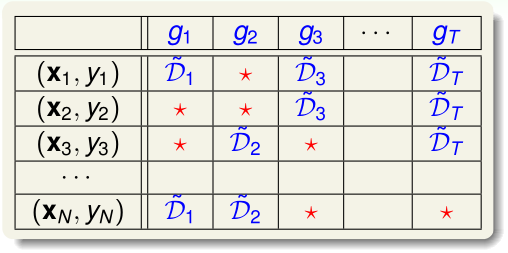
其中红星表明这个样本在\(g_t\)中没有用上
out-of-bag estimate(OOB)的思想就是,用这些标了红星的样本充当验证集。单个\(g_t\)的\(E_{out}(g_t)\)很大,用交叉验证来近似估计它是没有意义的,OOB希望通过交叉验证来估计\(E_{out}(G)\)
我们令\(G_n^-\)=去掉那些训练时用了\((x_n,y_n)\)的\(g_t\),剩下的\(g_t\)通过uniform blending得到的G,则OOB误差:
对于每个\(g_t\),其\(\tilde{\mathcal D_t}\)中没有包含的(out-of-bag)训练样本的个数有多少呢?假设bootstrap中re-sample是N'=N次,那么对于特定的一个样本\((x_n,y_n)\),其不在\(\tilde{\mathcal D_t}\)内的概率是
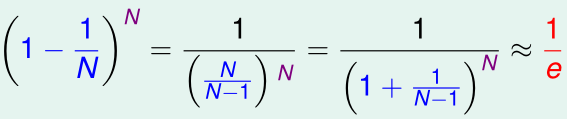
N很大时,该概率趋于1/e,此时对于每个\(g_t\),其out-of-bag的样本数就是N/e
OOB与一般的交叉验证相比,不需要重新训练每个\(g_t\),而且一般\(E_{oob}\)对\(E_{out}\)的近似估计很准确
Feature Selection
在特征选择问题中,我们希望移掉那些冗余(重复)特征、与学习问题不相关的特征,当原始特征维数N太大时,我们需要用更高效的方法选取特征,下面介绍基于随机森林的排列测试(permutation test)
如果第i维特征是我们需要的特征的话,假设所有\(x_i^{(n)}\sim P\),那么我们对每个训练样本,用随机的\(x_i'^{(n)}\sim P\)代替原始的\(x_i^{(n)}\),学习算法的效果就会变得很差
而分布\(P\)是我们未知的,一种很好的近似方法是对N个样本的第i维特征\(x_i^{(n)}\) random shuffle(这就是这种方法叫permutation test的原因),这样,random shuffle后仍有:每个\(x_i'^{(n)}\sim P\)
那么第i维特征的重要度importance可以表示为

\(performance(\mathcal D)=E_{oob}(G\ on\ \mathcal D)\),\(performance(\mathcal D^{(p)})=E_{oob}(G\ on\ \mathcal D^{(p)})\)
然而这样的话,在计算\(E_{oob}(G\ on\ \mathcal D^{(p)})\)要重新训练G,为了避免重新训练,我们再做一次近似:用将N个样本第i维\(x_i^{(n)}\) random shuffle后的\(\mathcal D^{(p)}\)对原来的G做OOB验证得到\(E_{oob}^{(p)}(G)\)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号