机器学习技法(林轩田)学习笔记:Lecture 7 & Lecture 8
Lecture 7:Blending and Bagging
Motivation of Aggregation
现在给出T个假设函数\(g_1,\cdots,g_T\),我们希望充分利用它们,得到一个更好的假设函数\(G\),我们有几种方法:
- 1、用交叉验证的方法从T个g里选\(E_{val}\)最小的:\(G(x)=g_{t^*}(x),t^*=\arg\min_{t}E_{val}(g_t^-)\)
- 2、均匀混合T个假设函数的输出结果。例如在二分类问题中,G输出T个假设函数的占多数的输出结果
- 3、将T个假设函数的输出结果加权输出
- 4、将T个假设函数的输出结果加权输出,但每个权重是关于输入x的函数\(q_t(x)\)
其中,第一种方法需要保证\(\min_{t}E_{val}(g_t^-)\)很小,才能保证很好的学习结果。但集成学习并不需要这个保证,它可以从很多个弱的假设函数g结合出更强的假设函数G

例如上图这个例子,假设现在已有三个弱假设函数(图中平行于坐标轴的三条灰线),通过集成学习可以得到更强的G(图中黑线),实现二分类。
Uniform Blending
Uniform Blending中,每个假设函数的权重都是1,例如在二分类中:
在多分类问题中,就是
在回归问题中,就是
当T个g完全相同时,G就等同于单个g了,G的效果没有提升;但当T个g的差异很大时,通过uniform blending得到的G的效果会显著提升
在回归问题中,
对于给定的单个输入x,
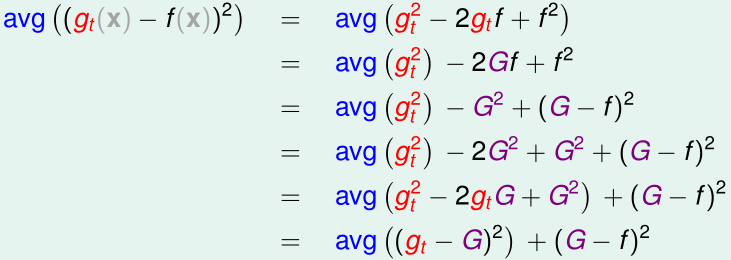
所以

(其中\(\varepsilon(g_t-G)^2\)表示\((g_t-G)^2\)在输入$x\sim \(某种概率分布\)P$的期望)
这个不等式解释了G的泛化误差比较小的原因
再考虑一个特殊的情况:T个线性回归的假设函数\(g_1,\cdots,g_T\)都是通过根据同一个概率分布,独立地随机采集N个样本得到训练集\(\mathcal D_t\),然后用相同的学习算法\(\mathcal A\)训练得到的,即\(g_t=\mathcal A(\mathcal D_t)\)

根据之前推出的不等式,可得:

等式右边第一项\(avg(\varepsilon(\cdots))\)被称为方差,表示不同训练集\(\mathcal D_t\)训练出的\(g_t\)之间的差距有多少;
第二项\(E_{oug}(\bar g)\)被称为偏差
Linear Blending
linear blending就是把所有的g的输出结果加权,例如在线性回归问题中,
为了求出参数\(\alpha\),我们需要最优化:
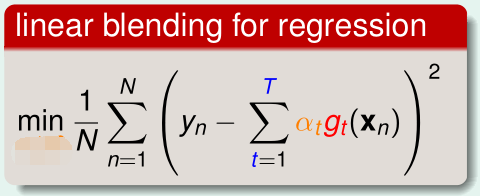
注意参数\(\alpha_t\)不需要限制条件\(\alpha_t\geq 0\),因为\(\alpha_t<0\)时,让\(g_t(x)\)取反就相当于\(\alpha_t> 0\)了
类似模型选择,这里我们也要把\(\mathcal D\)分成训练集\(\mathcal D_{train}\)、验证集\(\mathcal D_{val}\),用\(\mathcal D_{train}\)训练得到\(g_t^-,\alpha_t\),然后再用整个\(\mathcal D\)对每个\(g_t\)进行训练,最终得到的\(\mathcal D_{train}\)是系数为\(\alpha_t\),对\(g_t\)而非\(g_t^-\)的线性组合
除了linear blending外,G还可以是关于\(g_t\)的更高阶形式的非线性函数,这种被称为any blending(stacking),其优点是模型复杂度提高,缺点是更容易带来过拟合
Bagging(Bootstrap Aggregation)
之前的uniform blending和linear blending都是根据已有的T个假设函数\(g_t\),结合成新的G,但是我们该如何产生不同的\(g_t\)呢?
首先回顾之前的偏置、方差公式:

这里我们做两个近似:
- 1、T不再是正无穷大,而是有限值
- 2、每个\(g_t\)的训练集\(\mathcal D_t\)中的每个样本,都服从相同的概率分布P(且是独立同分布),而现在我们用已有的\(\mathcal D\)构造近似的\(\mathcal D_t\)
为了实现第二点,我们采用bootstraping,假设当前有N个训练样本\(\mathcal D\),我们从中随机抽一个样本,再放回去,如此重复N'次(N'不一定要等于N),这样就能构造大小为N'的\(\mathcal D_t\)
用bootstraping构造T个训练集\(\mathcal D_t\),训练出T个假设函数\(g_t\),然后aggregate的方法叫bagging。
需要注意的是,只有当学习算法对数据的样本分布很敏感时,bagging才有较好的表现
Lecture 8: Adaptive Boosting
Motivation of Boosting
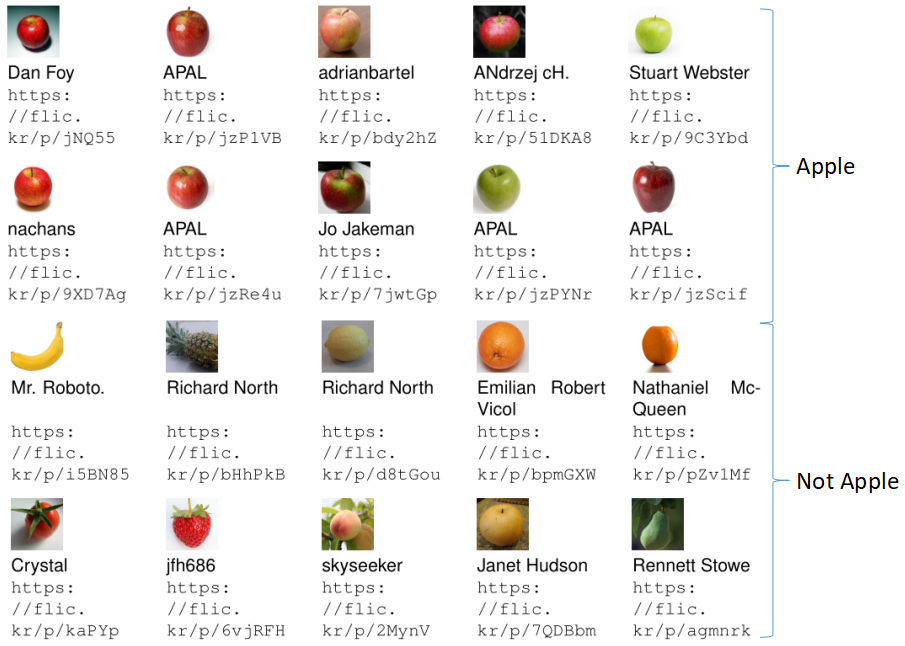
我们举例来说明adaboost的学习流程:如上图所示,现在给出若干图片作训练集,训练一个算法,让它可以判断输入的图片是否是苹果。初始时,每个训练样本的权重相同
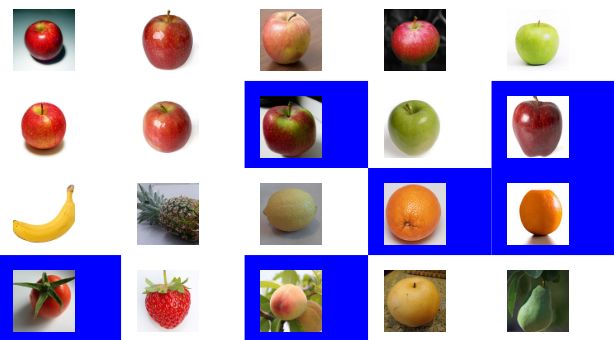
第一轮:我们认为圆的物体是苹果,结果一些样本分类错误(上图中蓝色),我们把这些犯错的样本的权重变大,把分类正确的样本的权重减小
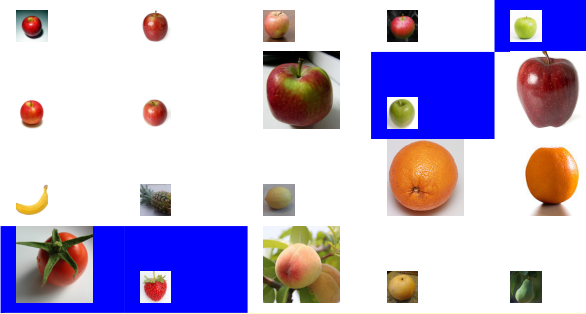
第二轮:为了让每个样本上的错误值的加权减小,我们想出了新的分类方法:红色的物体是苹果。结果这次又有一些样本分类错误(上图中蓝色),同样地,我们把这些犯错的样本的权重变大,把分类正确的样本的权重减小
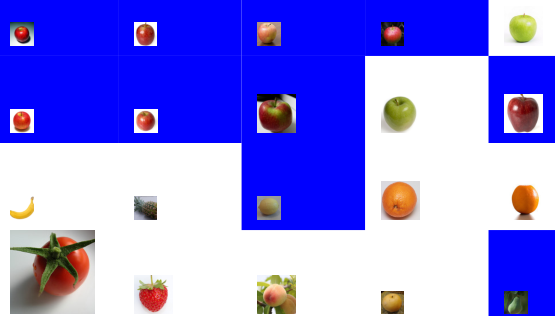
第三轮:为了让每个样本上的错误值的加权减小,我们想出了新的分类方法:绿色的物体是苹果。结果这次又有一些样本分类错误(上图中蓝色),同样地,我们把这些犯错的样本的权重变大,把分类正确的样本的权重减小
这样,我们从这三轮过程中得到了一种分类方法:大多数圆的物体是苹果,苹果大多数情况下是红色的,少数情况下是绿色的
Diversity by Re-weighting
在bootstrap里,我们每一次从\(\mathcal D\)通过re-sample的方式随机采样获得\(\tilde {\mathcal D_t}\)的过程,可以看作是给原始的\(\mathcal D\)中每个样本加上一个权重
例如下图中,我们从\(\mathcal D\) re-sample采样得到\(\tilde {\mathcal D_t}\)

这个过程相当于给原始的\(\mathcal D\)中每个样本加上了权重\(u_i\):
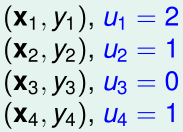
同时,误差函数也变成单点误差的加权之和:
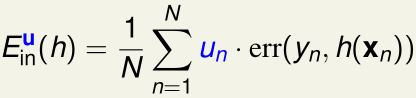
\(\mathcal D\)上这个新的误差函数,与\(\tilde {\mathcal D_t}\)上的误差函数,是完全一样的
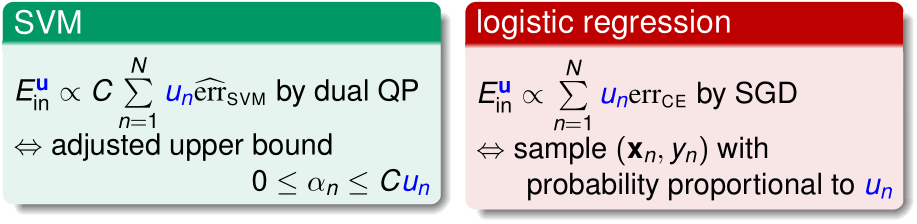
在Soft-margin SVM中,只需要把优化目标中单点误差\(\xi_n\)前乘上\(u_n\)即可,变成\(C\sum_{n=1}^Nu_n\xi_n\)
在逻辑回归中,我们把第n个样本复制\(u_n\)次,从而使它在SGD中被抽中的概率放大\(u_n\)倍即可
在二分类问题中,假设我们现在已经有N个\(u_n^{(t)}\)了,我们可以得到假设函数

现在我们希望从\(g_t\),N个\(u_n^{(t)}\)通过调整权重u,得到N个\(u_n^{(t+1)}\),从而得到下一个不同的\(g_{t+1}\)

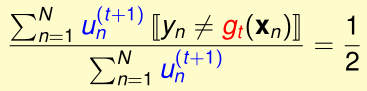
为了让\(g_{t+1}\)与\(g_{t}\)不同,我们希望\(g_{t}\)在加权为\(u_n^{(t+1)}\)的表现尽可能差,从而保证\(g_{t+1}\neq g_{t}\)
\(g_{t}\)在加权为\(u_n^{(t+1)}\)的表现最差时,近似于完全瞎猜,加权错误率为1/2,于是我们希望构造出\(u_n^{(t+1)}\),满足:
最简单的办法就是,设\(\epsilon_t=\)第t轮的加权错误率

所有分类正确的,\(u_n\)乘上\(\epsilon_t\);分类不正确的,\(u_n\)乘上\(1-\epsilon_t\)
Adaptive Boosting Algorithm
我们定义缩放因子\(\blacklozenge_t=\sqrt{\frac{1-\epsilon_t}{\epsilon_t}}\)
对于所有分类正确的,\(u_n\)除以\(\blacklozenge_t\);分类不正确的,\(u_n\)乘上\(\blacklozenge_t\)
这样处理\(u_n\)后,一样可以实现
当\(\epsilon_t<\frac 1 2\),表明\(\blacklozenge_t>1\),这样就相当于是放大那些分类错误的样本,缩小那些分类正确的样本了
现在我们可以得到一个初步的算法了:
- 初始化:所有的\(u_n^{(1)}=\frac 1 n\)
- for t=1...T{
- ____(1)根据\(\mathcal A(\mathcal D,u^{(t)})\)获得\(u^{(t)}\)加权的错误率最小的\(g_t\)
- ____(2)用缩放因子\(\blacklozenge_t=\sqrt{\frac{1-\epsilon_t}{\epsilon_t}}\),从\(u^{(t)}_n\)更新到\(u^{(t+1)}_n\)
- }
现在还剩一个问题,最终T个\(g_t\)该怎么结合成\(G(x)\)?adaptive boosting算法可以在求解\(g_t\)的过程中解决这个问题:
- 初始化:所有的\(u_n^{(1)}=\frac 1 n\)
- for t=1...T{
- ____(1)根据\(\mathcal A(\mathcal D,u^{(t)})\)获得\(u^{(t)}\)加权的错误率最小的\(g_t\)
- ____(2)用缩放因子\(\blacklozenge_t=\sqrt{\frac{1-\epsilon_t}{\epsilon_t}}\),从\(u^{(t)}_n\)更新到\(u^{(t+1)}_n\)
- ____(3)计算\(\alpha_t=\ln(\blacklozenge_t)\)
- }
- 最终的\(G(x)=\mathrm{sign}(\sum_{t=1}^T\alpha_tg_t(x))\)
对于\(g_t\)而言:
- 最坏情况下,其加权错误率为1/2,此时的\(\blacklozenge_t=1,\alpha_t=0\),相当于它在最终决策时不作任何贡献
- 最好情况下,其加权错误率为0,此时的\(\blacklozenge_t=+\infty,\alpha_t=+\infty\),相当于它在最终决策时起无穷大的作用
- 其加权错误率越低,\(\alpha_t\)越大,它在最终决策时起的作用也就越大
下面不加证明地给出adaboost算法的VC Bound:

不等式右侧的第一项\(E_{in}(G)\),当满足\(\epsilon _t\leq \epsilon <\frac 1 2\)时,可以保证在迭代次数\(T=O(log N)\)时可以实现\(E_{in}(G)=0\)
不等式右侧的第二项,随T增大时增长很缓慢,而N足够大时,就能保证这一项很小了
所以当基算法\(\mathcal A\)满足\(\epsilon _t\leq \epsilon <\frac 1 2\)时(保证比乱猜要强),哪怕基算法很弱,通过Adaboost也可以保证\(E_{in}=0,E_{out}\)很小
总结:Adaboost基于弱的基算法\(\mathcal A\),通过\(\blacklozenge_t\)调整加权错误率的权重,使用\(\alpha\)组合T个弱的假设函数\(g_t\),可以得到很强的假设函数G
Adaptive Boosting in Action
实际的adaboost最常用的基函数为decision stump:

该假设函数有三个参数\(s\in\{1,-1\},i,\theta\),表示选取输入x的第i个特征\(x_i\),当\(x_i\geq \theta\)时输出s,否则输出-s,如果输入特征是二维的,在二维平面上看,这个函数的决策边界就是一条与坐标轴平行的直线
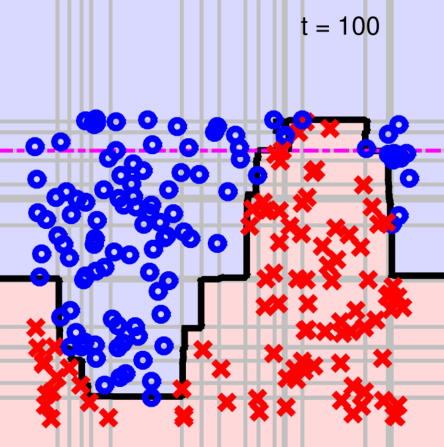
最终adaboost得到的决策边界(图中黑色)就是由若干个decision stump(图中灰色)构成的
