机器学习基石(林轩田)学习笔记:Lecture 6 & Lecture 7
Lecture 6:Theory of Generalization
对于n个点\(x^{(1)},\cdots,x^{(n)}\),break point=k,我们称此时\(\mathcal H\)的成长函数\(m_\mathcal H(n)=B(n,k)\),可以证明\(B(n,k)\leq n^k\)(而且这个上界很宽松)
根据Lecture 4推得的公式
即
此时我们希望把其中的m替换为\(n^k\),但这个替换并不是简单的替换,其中证明很复杂,这里省去,最终可以得到
我们称这个引入成长函数的新不等式为VC(Vapnik-Chervonenkis) bound
而在已知break point=k时,\(m_\mathcal H(n)=O(n^k)\),此时我们可以说机器是可以学习的,能够保证\(E_{in}(g)\approx E_{out}(g)\)。
Lecture 7:The VC Dimension
Definition of VC Dimension
之前我们已经定义了假设函数集\(\mathcal H\)的break point,break point是满足\(m_\mathcal H(n) <2^n\)的最小的n
而假设函数集\(\mathcal H\)的VC维\(d_{VC}(\mathcal H)\)是存在一组\(x^{(1)},\cdots,x^{(n)}\),满足\(m_\mathcal H(n) =2^n\)的最大的n
或者说,存在n个点\(x^{(1)},\cdots,x^{(n)}\),不论这n个点标签是怎样的,都能从\(\mathcal H\)中找到一个h对它们全部正确分类(即存在\(h\in \mathcal H\)能shatter这n个点)
根据上述定义,显然有\(d_{VC}(\mathcal H)=\)break point(\(\mathcal H\))-1
回顾Lecture 5中\(\mathcal H\)分别为positive rays、positive intervals、convex sets以及2D感知机时的\(m_\mathcal H(n)\),我们可以得到对应的\(d_{VC}\)

当\(n\geq 2,d_{VC}\geq 2\)时,我们有\(m_\mathcal H(n)\leq n^{d_{VC}}\),在我们已知\(d_{VC}\)时,Lecture 6的不等式
中的\(m_\mathcal H(2n)\)就可以被替换掉:
则\(P(\exists h\in \mathcal H\ \mathrm{s.t.}\ |E_{in}(h)-E_{out}(h)|>\epsilon)\)的上界就只与n有关了。
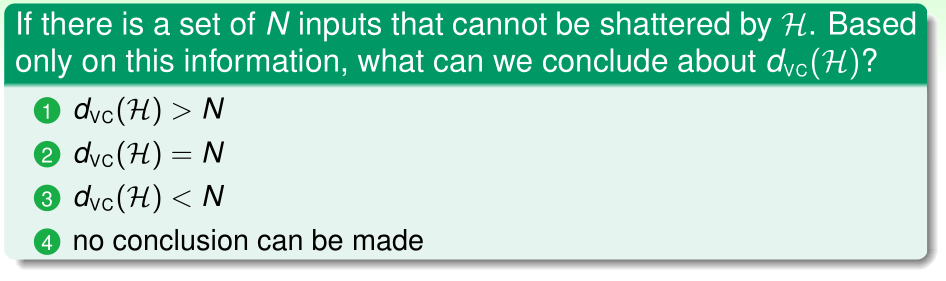
答案:(4)
理由:题目条件只告诉我们,存在一组n个点不能被\(\mathcal H\) shattered,但我们不能判定是否存在一组n个点可以被\(\mathcal H\) shattered,也就无法推断\(d_{VC}(\mathcal H)\)了
VC Dimension of Perceptron
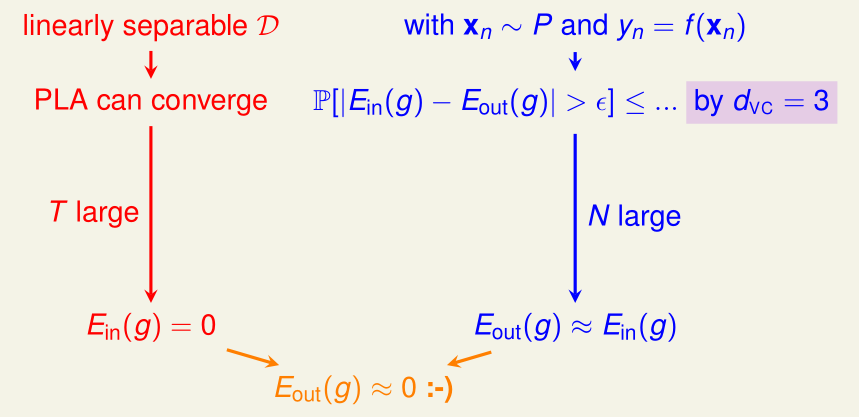
对于2D感知机而言,假设训练集\(\mathcal D\)线性可分,那么经过足够多次迭代,我们能找到一个假设函数\(g,E_{in}(g)=0\)
而所有的输入数据\(x{(n)}\sim P,y^{(n)}=f(x^{(n)})\)(f(x)是我们未知的一个函数)
由于2D感知机的\(d_{VC}=3\),所以\(P(\exists h\in \mathcal H\ \mathrm{s.t.}\ |E_{in}(h)-E_{out}(h)|>\epsilon)\)有一个确定的、只关于n的上界,n足够大时,\(E_{out}(g)\approx E_{in}(g)\)
下面我们把2D感知机的VC维,推广到d-D感知机的情况(d>2):\(d_{VC}=d+1\)
首先证明,d-D感知机\(d_{VC}\geq d+1\):
我们可以构造一组d+1个点,使得它们能被d-D感知机的\(\mathcal H\) shattered:
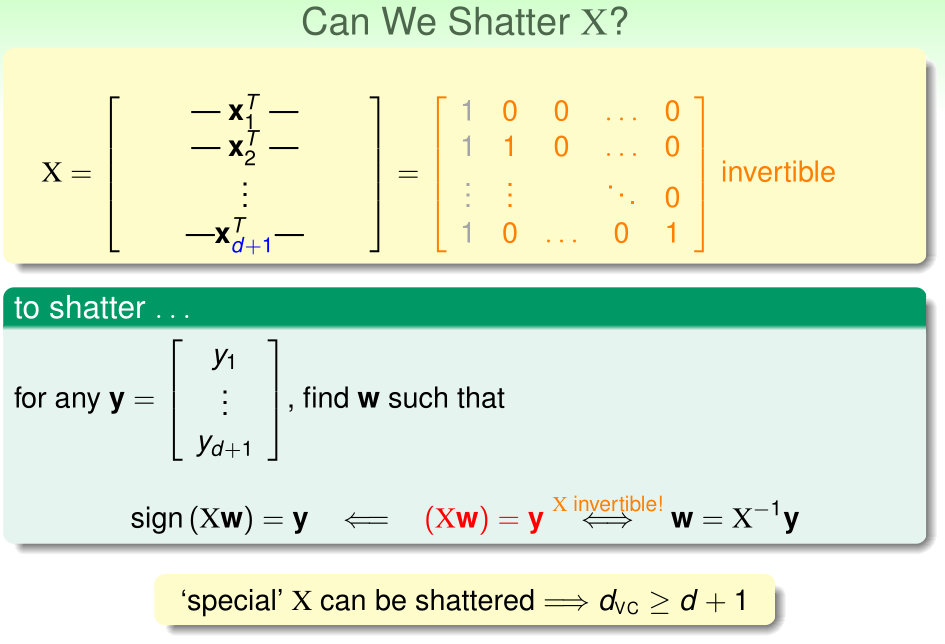
(注意第一列灰色的1对应于偏置)
显然这样的d+1个输入数据构成的矩阵\(X\)可逆,对于任意的标签列向量\(y\),令\(Xw=y,w=X^{-1}y\),此时显然有\(\mathrm{sign}(Xw)=\mathrm{sign}(y)=y\),所以这d+1个点能被shattered
再证明,d-D感知机\(d_{VC}\leq d+1\):
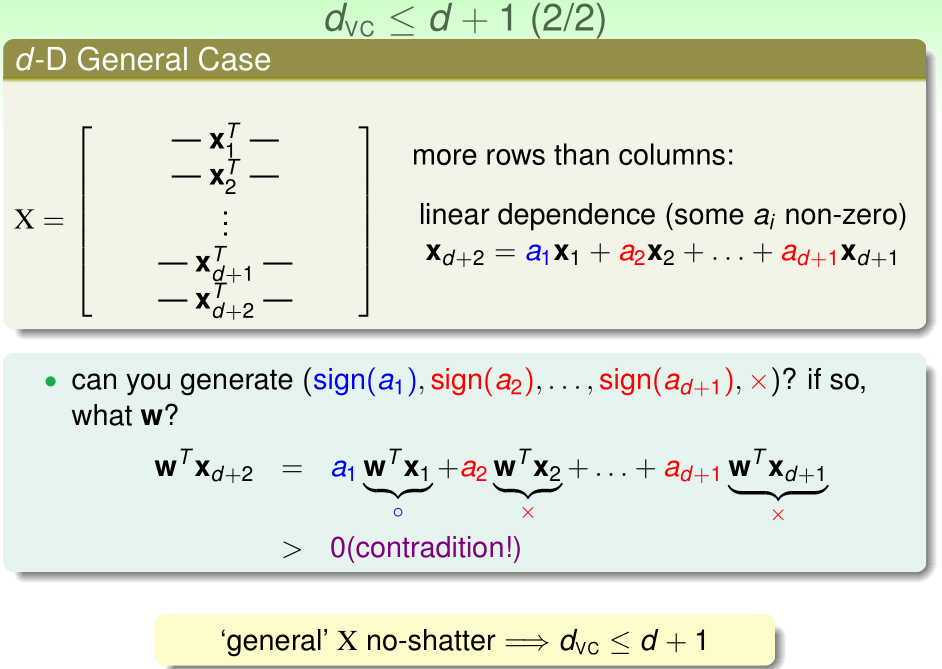
此时d+2个输入数据构成的矩阵\(X\),\(r(X)\leq d+1\),所以行向量组线性相关,不妨设\(x_{d+2}\)可以被其他d+1个行向量线性表示(如果不能的话,找一个可以被其他行向量线性表示的\(x_i\)交换到\(x_{d+2}\))
若\(a_1>0,a_2<0,\cdots,a_{d+1}<0\),则,如果这d+2个点的标签分别为
那么
为了满足要求,\(w^Tx_1\)与\(a_1\)同号,......,\(w^Tx_{d+1}\)与\(a_{d+1}\)同号,那么\(a_1w^Tx_1>0,\cdots,a_{d+1}w^Tx_{d+1}>0\),从而
这就导致第d+2个数据分类一定是错误的。
所以对于任意的d+2个点,d-D感知机的\(\mathcal H\)都不能shatter它们。\(d_{VC}(\mathcal H)\leq d+1\)
Physical Intuition of VC Dimension
假设函数集\(\mathcal H\)的VC维决定了假设函数的分类能力(这体现在参数数量上,参数越多)。VC维越大,\(\mathcal H\)的分类能力越强,\(\mathcal H\)能够shatter更多的点。
一般地,VC维\(\approx\)假设函数参数个数(但这个规律在某些时候不成立)
回顾之前所学的内容,机器要想学习,必须满足:
- 1、\(E_{in}(g)\approx E_{out}(g)\),泛化误差是可以通过假设函数在训练集上的经验误差近似估计的。
- 2、\(E_{in}(g)\)能够做到足够小。这样学习算法才能从\(\mathcal H\)中选取出一个经验误差足够小的g,从而根据(1)保证它的泛化误差足够小,这样学习算法才是有效的。
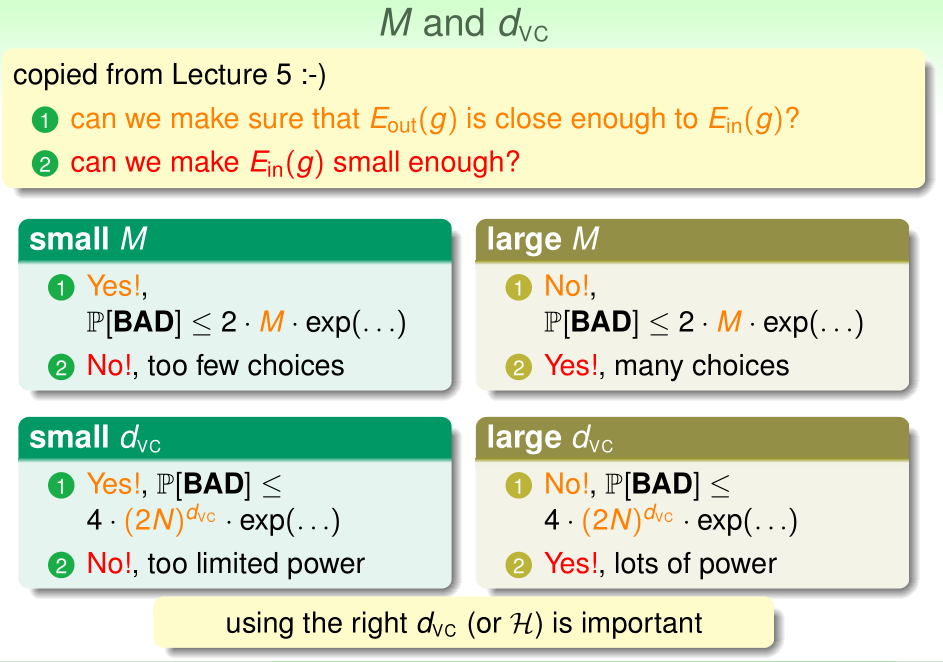
当\(\mathcal H\)为有限集时:
- (a)\(m=|\mathcal H|\)小,此时根据之前推出的不等式,可以满足(1),但是由于可供选择的假设函数h太少,不能满足(2)
- (b)\(m=|\mathcal H|\)很大,可选择的假设函数很多,(2)能满足,但是(1)就无法满足了。
类似地,当\(\mathcal H\)为无限集时:
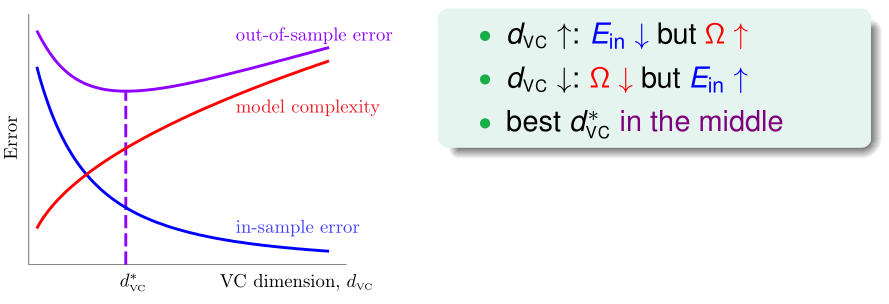
- (a)VC维很小,此时根据之前推出的不等式,可以满足(1),但是由于假设函数分类能力太弱,不能满足(2)
- (b)VC维很大,假设函数分类能力很强,(2)能满足,但是(1)就无法满足了。
可见合适大小的VC维是非常重要的。
Interpreting VC Dimension
令\(\delta=4(2n)^{d_{VC}}\exp(-\frac 1 8\epsilon^2n)\),则,\(\epsilon =\sqrt{\frac 8 n \ln (\frac{4(2n)^{d_{VC}}}{\delta})}\)
那么我们至少有\(1-\delta\)的把握,使得对于所有的\(h\in \mathcal H\):
令\(\Omega=\sqrt{\frac 8 n \ln (\frac{4(2n)^{d_{VC}}}{\delta})}\ \ \mathrm{w.r.t}\ \ n,\mathcal H,\delta\),则
我们令误差容忍度\(\epsilon=0.1\),\(\delta=0.1\),如果我们已知\(d_{VC}=3\),那么样本数取多少才合适呢?
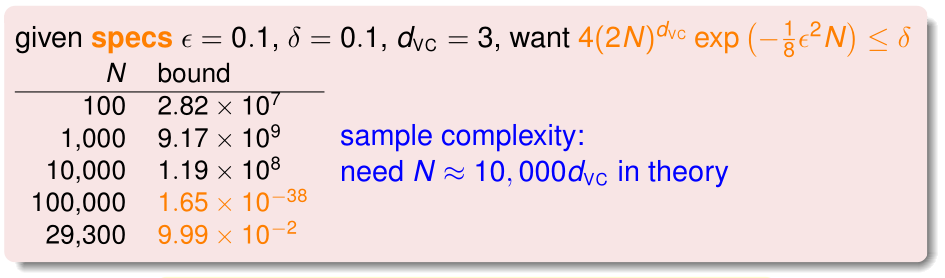
从上表可见,理论上我们至少要\(n\approx 10000d_{VC}\)
然而VC Bound这个上界很宽松,实际上一般来说\(n\approx 10d_{VC}\)就够了
