视觉SLAM和激光SLAM的实现
激光 SLAM:
早在 2005 年的时候,激光 SLAM 就已经被研究的比较透彻,框架也已初步确定。激光 SLAM,是目前最稳定、最主流的定位导航方法。
激光 SLAM 地图构建
VSLAM(基于视觉的定位与建图):
随着计算机视觉的迅速发展,视觉 SLAM 因为信息量大,适用范围广等优点受到广泛关注。
视觉 SLAM 地图构建,图片来源:百度 AI
(1)基于深度摄像机的 Vslam,跟激光 SLAM 类似,通过收集到的点云数据,能直接计算障碍物距离;
(2)基于单目、鱼眼相机的 VSLAM 方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建;
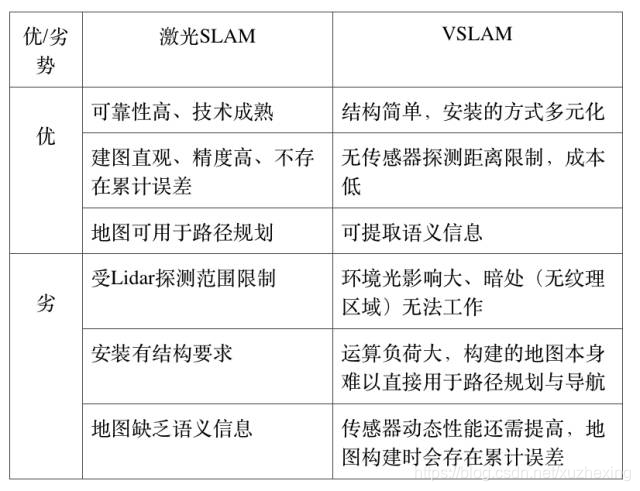
视觉SLAM和激光SLAM的对比
一直以来,不管是产业界还是学术界,对激光 SLAM 和 VSLAM 到底谁更胜一筹,谁是未来的主流趋势这一问题,都有自己的看法和见解。下面就简单从几个方面对比了一下激光 SLAM 和 VSLAM。
成本
不管是 Sick,北洋,还是 Velodyne,价格从几万到几十万不等,成本相对来说比较高,但目前国内也有低成本激光雷达(RPLIDAR)解决方案。VSLAM 主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。
应用场景
从应用场景来说,VSLAM 的应用场景要丰富很多。VSLAM 在室内外环境下均能开展工作,但是对光的依赖程度高,在暗处或者一些无纹理区域是无法进行工作的。而激光 SLAM 目前主要被应用在室内,用来进行地图构建和导航工作。
地图精度
激光 SLAM 在构建地图的时候,精度较高;VSLAM,比如常见的,大家也用的非常多的深度摄像机 Kinect,(测距范围在 3-12m 之间),地图构建精度约 3cm;所以激光 SLAM 构建的地图精度一般来说比 VSLAM 高,且能直接用于定位导航。
易用性
激光 SLAM 和基于深度相机的 VSLAM 均是通过直接获取环境中的点云数据,根据生成的点云数据,测算哪里有障碍物以及障碍物的距离。但是基于单目、双目、鱼眼摄像机的 VSLAM 方案,则不能直接获得环境中的点云,而是形成灰色或彩色图像,需要通过不断移动自身的位置,通过提取、匹配特征点,利用三角测距的方法测算出障碍物的距离。
安装方式
雷达最先开始应用于军事行业,后来逐渐民用。被大家广泛知晓最先应该是从谷歌的无人车上所知道的。当时 Velodyne 雷达体积、重量都较大,应用到一些实际场景中显然不适合。比如无人机、AR、VR 这种,本身体积就很小,再搭载大体积的激光雷达的话,根本无法使用,也影响美感和性能。所以 VSLAM 的出现,利用摄像头测距,弥补了激光雷达的这一缺点,安装方式可以随着场景的不同实现多元化。

其他
除了上面几点之外,在探测范围、运算强度、实时数据生成、地图累计误差等方面,激光 SLAM 和视觉 SLAM 也会存在一定的差距。
比如:
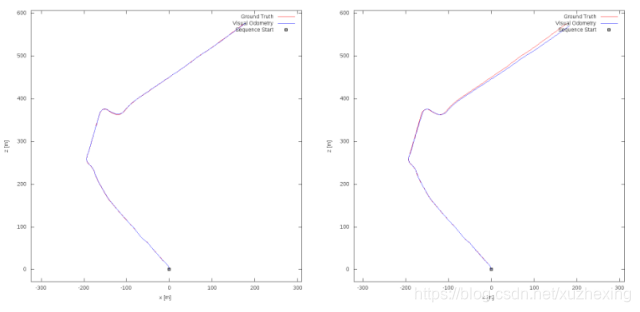
注:左为 Lidar SLAM,右为 VSLAM,数据来源:KITTI
可以明显看出,对于同一个场景,VSLAM 在后半程中出现了偏差,这是因为累积误差所引起的,所以 VSLAM 要进行回环检验。
激光 SLAM 是目前比较成熟的定位导航方案,视觉 SLAM 是未来研究的一个主流方向。所以,未来,多传感器的融合是一种必然的趋势。取长补短,优势结合,为市场打造出真正好用的、易用的 SLAM 方案。
视觉SLAM相关资料
常用方法
特征法:
ORB SLAM https://github.com/raulmur/ORB_SLAM2
优势: 在静态环境下定位准确,稳定, 单目和双目版本都可以达到实时(高于10frames/s)。代码可读性强,易扩展, 网上也有实现和imu融合的版本。
劣势:建的地图点云稀疏。 运行速度方面,因为提特征点的时间有瓶颈最快的运行速度应该不超过30frames/s, 我在本机 (i7-6600U) 测的速度基本都在20frames/s左右,因此对于高帧率的相机需要降帧率才能用。对动态物体很敏感,再有动态物体时非常容易tracking lost。
总的来说ORB-SLAM还是在智能驾驶领域用的最广泛的SLAM算法,因为它在work的时候可以work的很好,急需解决的问题是对特征点提取的加速,以及处理的环境中的动态物体。
直接法
优势:可以生成相当稠密的点云, 这个优点给DSO很大想象空间。 速度在可以work的时候很快, 大概在20-30frames/s。
劣势:对场景光照要求高,要求尽量保持曝光时间的稳定。对动态物体没有orb那样敏感。代码可扩展性比较差,目前开源的只有单目版本,这个版本没有做尺度恢复因此没法在实际中直接用。这里贴一个我开发的stereo dso: https://github.com/JiatianWu/stereo-dso, 可以恢复相对准确的pose。
DSO的缺点和优点都很明显,目前的局限应该是还没有一个开源可用的像双目orb那样稳定的版本,但是有很大的潜力去做一些orb无法做的事,比如建稠密的高精地图,甚至semantic的高精地图都有可能。
简单说一下LSD,自从DSO出来后LSD就没多少价值了,因为DSO在准确性,稳定性和速度上都比LSD好。LSD有个优势就是回环检测,这个对于DSO有些鸡肋,因为如果odometry都可以很精确为什么需要用额外的计算量去做回环检测呢。
半直接法
优点:非常快, 快到可以在laptop上达到300frames/s。
缺点:误差大,不准确。这也是为达到高速度牺牲性能的结果吧。
SVO适用的主要场景是无人机,因此代码中采用了一些无人机上的假设,比如假设相机的姿态是向下看的。SVO的最大问题就是不准确,这个可以通过融合imu改善,前提是你拥有一个准确的imu。。
Visual-inertial SLAM
- 首推港科大的VINS https://github.com/HKUST-Aerial-Robotics/VINS-Mono。 没仔细研究过, 不过港科大的这个工作开源的很彻底,ros版本的和ios版本的都开源了, 大家可以看看产品级的slam应用是怎么实现的,代码也很清晰,主要侧重点在后端的优化,前端写的很简洁。
另外经典的VIO还是ETH的OKVIS: https://github.com/ethz-asl/okvis 。VINS和OKVIS性能差不多, OKVIS开发得更早一些, 后端优化的一些思想比如sliding window optimization也被DSO和VINS所借鉴。
参考:http://blog.csdn.net/akunainiannian/article/details/45363731
链接:https://www.zhihu.com/question/51045335/answer/340167377
MonoSLAM、Co-SLAM、Swarm SLAM、ORB_SLAM、RGB-D SLAM
视觉SLAM学习资料
一、入门篇
-
Andrew Davison的课程: http://www.doc.ic.ac.uk/~ajd/Robotics/index.html
week7 SLAM,week8里面推荐了slam的两个入门 Tutorial 1 和Tutorial 2
-
瑞士苏黎世理工的学生练习:http://www.csc.kth.se/~kootstra/index.php?item=313&menu=300
把excise 3:SLAM(EKF)做完,SLAM原理基本理解
-
高博的CNBLOG:http://www.cnblogs.com/gaoxiang12/
二、现有资源
-
OpenSLAM:https://openslam.org/
这个网站中含有很多slam方面的资料,编写的程序也各有不同,很权威
-
Kitti图库,可以做simulation:http://www.cvlibs.net/datasets/kitti/
-
苏黎世理工学习练习excise3看完后可以使用Javier Civera 的程序进行试手,注意对calibration的调整
http://webdiis.unizar.es/~jcivera/code/1p-ransac-ekf-monoslam.html
-
对于Javier Civera的1p RANSAC-monoSLAM有一定了解了,可以试试用SURF去实现
南理工论文可以参考 http://cdmd.cnki.com.cn/Article/CDMD-10288-1012319519.htm
-
RGB-D SLAM Dataset and Benchmark:http://cvpr.in.tum.de/data/datasets/rgbd-dataset
慕尼黑工业大学,还有其他的数据库,如单目视觉里程计数据库,详见http://vision.in.tum.de/data/datasets
-
Monocular SLAM:http://vision.ia.ac.cn/Students/gzp/monocularslam.html
The research in monocular SLAM technology is mainly based on the EKF(Extended Kalman Filter) SLAM approaches.
-
MRPT:http://www.mrpt.org/ the mobile robot programming toolkit非常好的东西
-
PTAM:http://www.robots.ox.ac.uk/~gk/PTAM/
libCVD:http://www.edwardrosten.com/index.html
编译PTAM:http://www.fx114.net/qa-207-77156.aspx
windows下编译PTAM:http://blog.csdn.net/cgf_909/article/details/24457771
三、相关书籍
-
Multiple View Geometry in Computer Vision Second Edition ,http://www.robots.ox.ac.uk/~vgg/hzbook/
计算机视觉方面大神级别的书,也有中文版
-
Robotics Vision and Control ,http://www.petercorke.com/RVC/
澳大利亚昆士兰理工大学的Peter Corke是机器视觉领域的大牛人物,他所编写的Robotics, vision and control一书更是该领域的经典教材
配套有matlab工具箱。工具箱分为两部分,一部分为机器人方面的,另一部分为视觉方面的工具箱
源代码都是开放免费下载的: http://petercorke.com/Toolbox_software.html
-
Probabilistic Robotics,http://www.probabilistic-robotics.org/理解这本书要有很好的数学基础
四、研究学者
国内激光雷达Slam武汉大学做得好,李明教授是最早一批做3Dslam的;国防科大的应该也不错。
国外的话斯坦福的塞巴斯蒂安是绝对的大牛,他的徒弟也都很厉害;KIT的SLAM6D做的很好,现在网上有开源的3DTK,内部集成了slam6D;
德国弗莱堡大学做的也不错。
-
英国帝国理工学院Andrew Davison:http://www.doc.ic.ac.uk/~ajd/,SLAM领域的权威
-
麻省理工John Leonard:http://marinerobotics.mit.edu/ 侧重于应用。目前主要在做水下SLAM的项目。参加过DARPA的智能车挑战赛。
-
悉尼大学Victoria Par: http://www-personal.acfr.usyd.edu.au/nebot/victoria_park.htm 经典数据库
-
慕尼黑工业大学Jakob Engel:http://vision.in.tum.de/members/engelj
-
斯坦福Sebastian Thrun:http://robots.stanford.edu/papers.html
五、其他资源(一)
-
Giorgio Grisetti; Cyrill Stachniss; Wolfram Burgard; (GridMapping 算法,及概率机器人一书作者)
-
M. Montemerlo; Dirk Haehnel; Sebastian Thrun; (FastSLAM创始者,理论水平和实际应用能力非常强)
参加过DARPA的智能车挑战赛,取得最好成绩。
-
Austin Eliazar; Ronald Parr; (DP-SLAM创始者,从文章到数据,程序都公开的牛人)
-
以 Jose Neira和Jose luis Blanco为代表的一批西班牙学者.
-
http://babel.isa.uma.es/mrpt/index.php/Main_Page 2008年开始陆续出现了一些好文章.
-
http://cres.usc.edu/radishrepository/view-all.php 包含了大量的用于验证SLAM算法的数据.
-
http://www.isa.uma.es/C13/jlblanco/default.aspx 西班牙的一个博士生.编程能力极强. 另外Jose Neira带领的团队也比较猛.
原文:https://blog.csdn.net/Darlingqiang/article/details/80689922

 浙公网安备 33010602011771号
浙公网安备 33010602011771号