LiDAR特征提取 -- 面特征
【原创文章】转载请注明来源:https://www.cnblogs.com/qiushanju/p/11948873.html
【文章一】
C. Feng, Y. Taguchi and V. R. Kamat, "Fast plane extraction in organized point clouds using agglomerative hierarchical clustering," 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014, pp. 6218-6225.
doi: 10.1109/ICRA.2014.6907776
2014年的文章,被引82次(谷歌学术,统计至2020.01)。文章主要借助图(Graph)的概念,整体流程图如下。
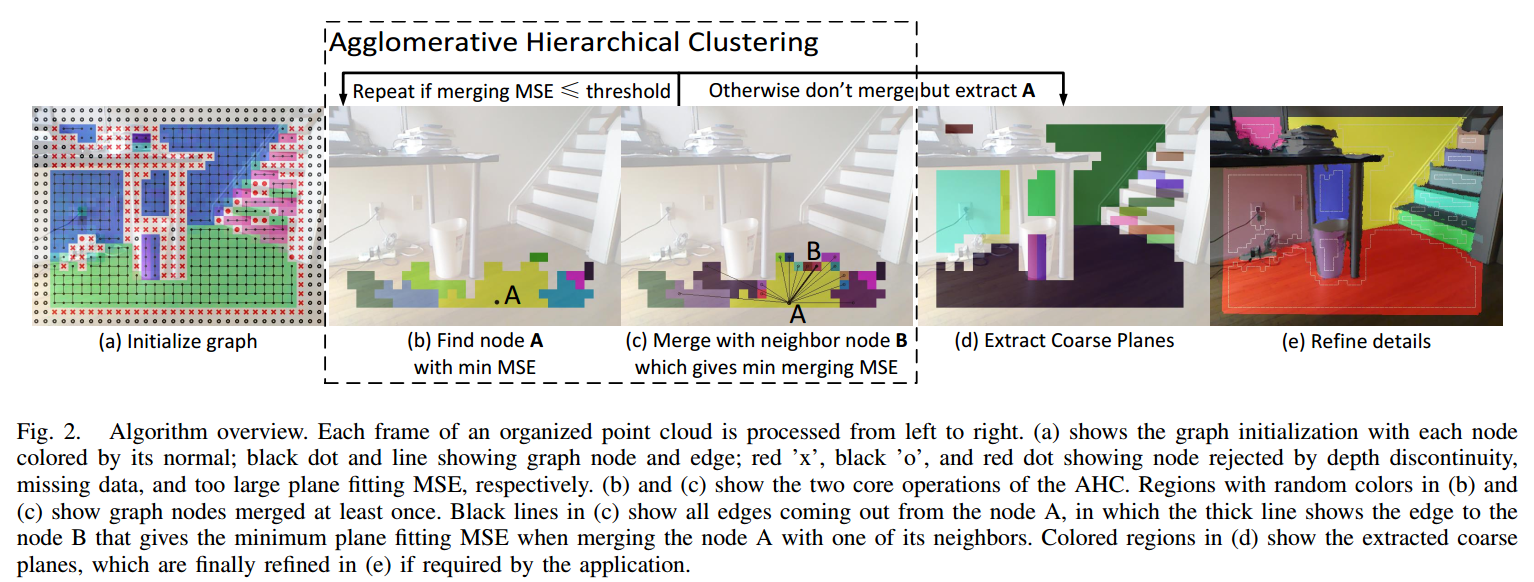
首先,通过点云平面图(深度图或组织成二维图像形式的lidar点云)建立邻接关系,将局部固定大小且不相交的点云(像素)块作为图结点(node);通过分析每个node中点云的平面拟合误差,将所有的“平面结点”加入到Graph中。
在介绍平面拟合前,作者先介绍了一下线性特征拟合的思路:
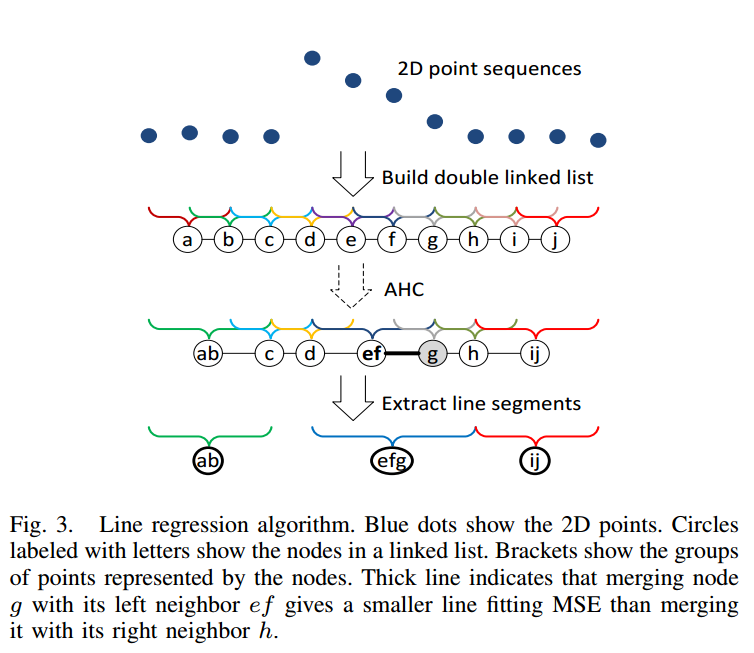
依次遍历处于一条扫描线上的点,将一定窗口大小(图中窗口大小=3)中的数据点构建为1个结点(node),结点之间有overlap;每个结点内部各自计算直线拟合误差MSE,将MSE小于给定阈值的结点作为种子结点;开始合并环节,从种子结点开始,分别计算其某个相邻结点与当前结点内数据点的直线拟合MSE,若最小的MSE满足给定阈值,则将该结点与最小MSE的邻结点合并,否则该类别停止生长;重复上述合并环节,直至所有种子点完成合并,每个聚类结果即为一条提取出的线段特征。
【文章二】
J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time. Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014
LiDAR SLAM鼻祖类文章。在lidar odometry环节涉及到平面特征点与线状特征点的提取。提取原理是在每条扫描线上计算每个点的局部曲率;然后对每条扫描线划分区域,对每个区域内曲率值排序,取曲率值最小的N个点作为这一区域内的平面特征点。文中曲率计算的公式如下,比较简单,此处不作详细介绍。

需要注意的是,由于该方法在每个区域仅仅提取出若干个平面特性最好的点,会导致大量平面点提取不出来(相当于做过一次抽稀)。
【文章三】
Michael Ying Yang, Wolfgang Forstner. Plane Detection in Point Cloud Data
2010年的文章,被引145次(谷歌学术,统计至2020.01)。
主要原理如下:
