TX2 Ubuntu16.04上安装 kinectV2
本文参考 https://www.ncnynl.com/archives/201706/1780.html
参考 https://blog.csdn.net/qq_33835307/article/details/81272377
在TX2上整合kinect v2深度相机,由于TX2默认是USB2.0端口,kinect v2深度相机是USB3.0接口,所以在使用前需要把USB2.0的端口改为USB3.0的端口
1、输入:
sudo gedit /boot/extlinux/extlinux.conf
编辑文件将下面代码做更改
usb_port_owner_info=0
更改为
usb_port_owner_info=2
2、禁止USB自动挂起
在usb_port_owner_info=2后空格加上
usbcore.autosuspend=-1
#查看CUDA和OpenCV
nvcc -V pkg-config --modversion opencv
3、安装libfreenect2
1) 下载源码:
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2
2) 安装构建工具
sudo apt-get install build-essential cmake pkg-config
3)安装libusb(版本必须> = 1.0.20)
sudo apt-get install libusb-1.0-0-dev
4)安装TurboJPEG
sudo apt-get install libturbojpeg libjpeg-turbo8-dev
5)安装 OpenGL
sudo apt-get install libglfw3-dev
6)编译:
cd ~/libfreenect2
mkdir build && cd build
cmake .. -DENABLE_CXX11=ON
make install
4、
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
重新插上Kinect2重启TX2就可以了。
在终端输入:
libfreenect2/build//bin/Protonect
就可以看到相机的效果图了

安装iai-kinect2
利用命令行从Github上面下载工程源码到工作空间内src文件夹内:
1、下载编译
mkdir -p ~/kinect2_ws/src
cd ~/kinect2_ws/src
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/kinect2_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
编译结束, 一切OK的话, 会看到如下提示:
还需添加source对应的目录
2、
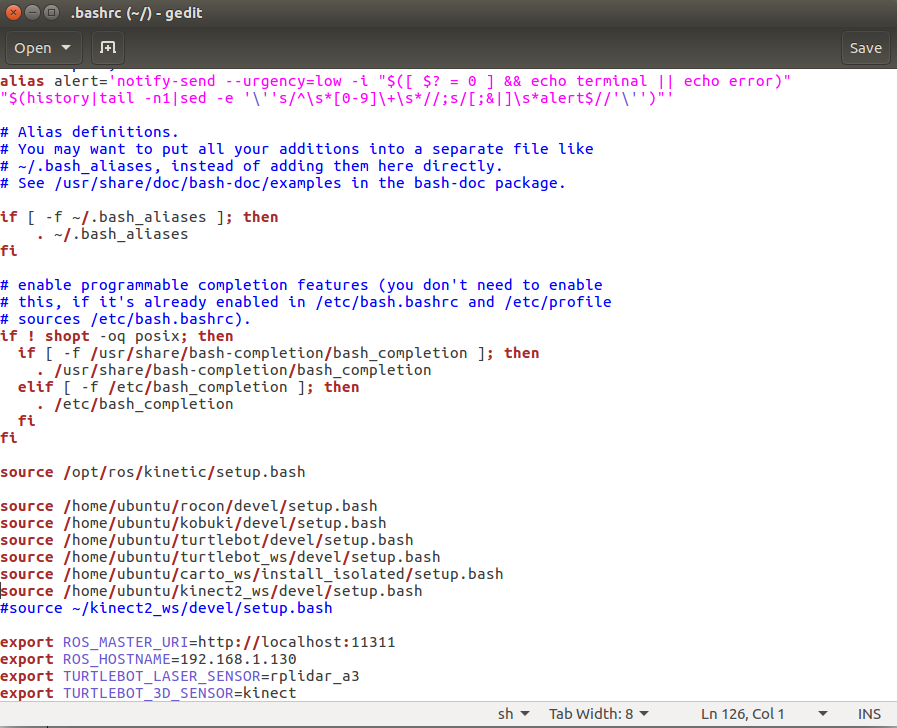
gedit ~/.bashrc
3、添加自己工作空间
source /home/ubuntu/kinect2_ws/devel/setup.bash
在终端输入:
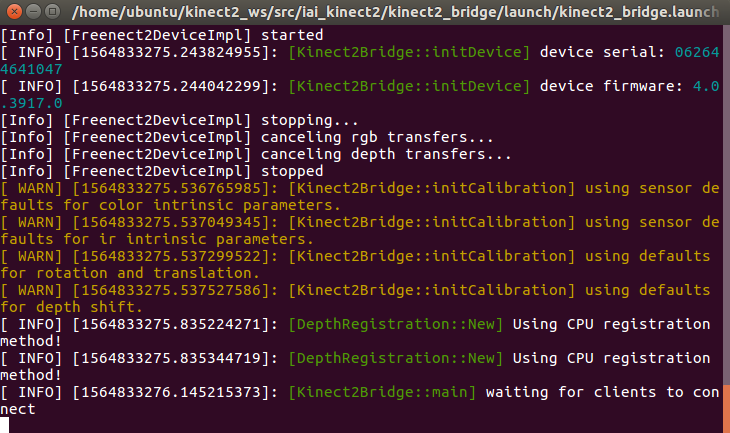
roslaunch kinect2_bridge kinect2_bridge.launch
在ROS内启动kinect2
在新的终端输入
rosrun kinect2_viewer kinect2_viewer sd cloud
可以开启一个Viewer查看cloud数据
非常感谢各论坛、网站提供的资料。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号