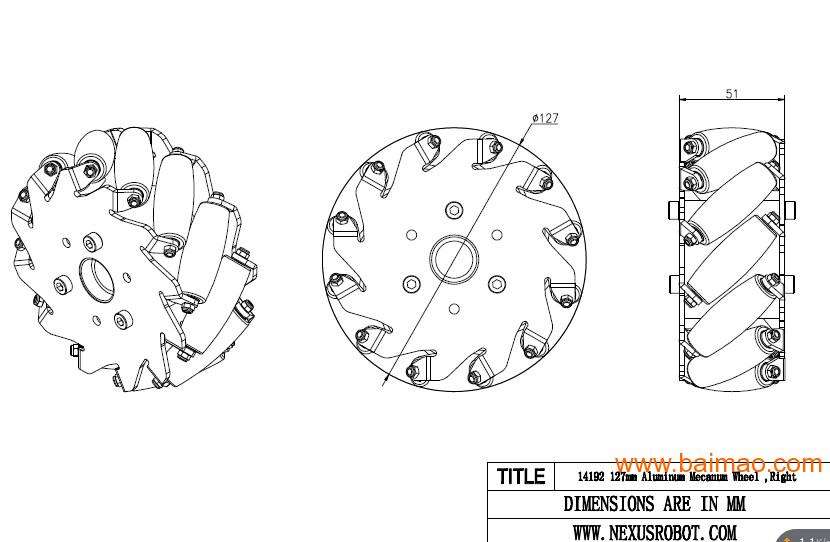
麦克纳姆轮
使用直流减速电机
L298N驱动模块
驱动方式:
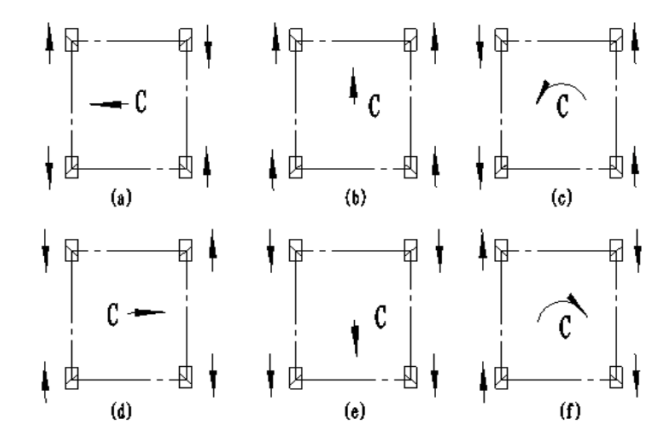
A为向前转,V为向后转。本案例中使用引脚如下:
左前 PC8 PC9
左后 PC6 PC7
右前 PD8 PD9
右后 PC4 PC5
头文件中define几个轮子不同的转动方向
1 #define Left_Front_A GPIOC->ODR |= (0x1 << 8);GPIOC->ODR &= ~(0x1 << 9); 2 #define Left_Front_V GPIOC->ODR &= ~(0x1 << 8);GPIOC->ODR |= 0x1 << 9; 3 #define Left_Back_A GPIOC->ODR |= (0x1 << 6);GPIOC->ODR &= ~(0x1 << 7); 4 #define Left_Back_V GPIOC->ODR &= ~(0x1 << 6);GPIOC->ODR |= 0x1 << 7; 5 #define Right_Front_A GPIOD->ODR |= (0x1 << 8);GPIOD->ODR &= ~(0x1 << 9); 6 #define Right_Front_V GPIOD->ODR &= ~(0x1 << 8);GPIOD->ODR |= 0x1 << 9; 7 #define Right_Back_A GPIOC->ODR |= (0x1 << 4);GPIOC->ODR &= ~(0x1 << 5); 8 #define Right_Back_V GPIOC->ODR &= ~(0x1 << 4);GPIOC->ODR |= 0x1 << 5;
c文件中定义几种不同的转动方式:
1 /* 2 ********************************************************* 3 *麦克纳姆轮 向前 4 * 5 * 6 ********************************************************* 7 */ 8 void whell_go(void) 9 { 10 Left_Front_A; 11 Left_Back_A; 12 Right_Front_A; 13 Right_Back_A; 14 } 15 16 /* 17 ********************************************************* 18 *麦克纳姆轮 向后 19 * 20 * 21 ********************************************************* 22 */ 23 void whell_back(void) 24 { 25 Left_Front_V; 26 Left_Back_V; 27 Right_Front_V; 28 Right_Back_V; 29 } 30 31 /* 32 ********************************************************* 33 *麦克纳姆轮 向右 34 * 35 * 36 ********************************************************* 37 */ 38 void whell_right(void) 39 { 40 Left_Front_V; 41 Left_Back_A; 42 Right_Front_A; 43 Right_Back_V; 44 } 45 46 /* 47 ********************************************************* 48 *麦克纳姆轮 向左 49 * 50 * 51 ********************************************************* 52 */ 53 void whell_left(void) 54 { 55 Left_Front_A; 56 Left_Back_V; 57 Right_Front_V; 58 Right_Back_V; 59 } 60 61 /* 62 ********************************************************* 63 *麦克纳姆轮 左转 64 * 65 * 66 ********************************************************* 67 */ 68 void whell_turn_left(void) 69 { 70 Left_Front_V; 71 Left_Back_V; 72 Right_Front_A; 73 Right_Back_A; 74 } 75 76 /* 77 ********************************************************* 78 *麦克纳姆轮 右转 79 * 80 * 81 ********************************************************* 82 */ 83 void whell_turn_right(void) 84 { 85 Left_Front_A; 86 Left_Back_A; 87 Right_Front_V; 88 Right_Back_V; 89 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号