

学习视频:

打开roscore核心先跑起来,再开海龟仿真器,
对于qt指令可视化运行可以查看全部指令,方法就是输入rqt_再按两下tab就好
先用rqt_console 看看,输出日志信息
出现问题就会发出一些日志,比如下面的撞墙

下面的Highlight Messages可以写入要搜索的特定信息;
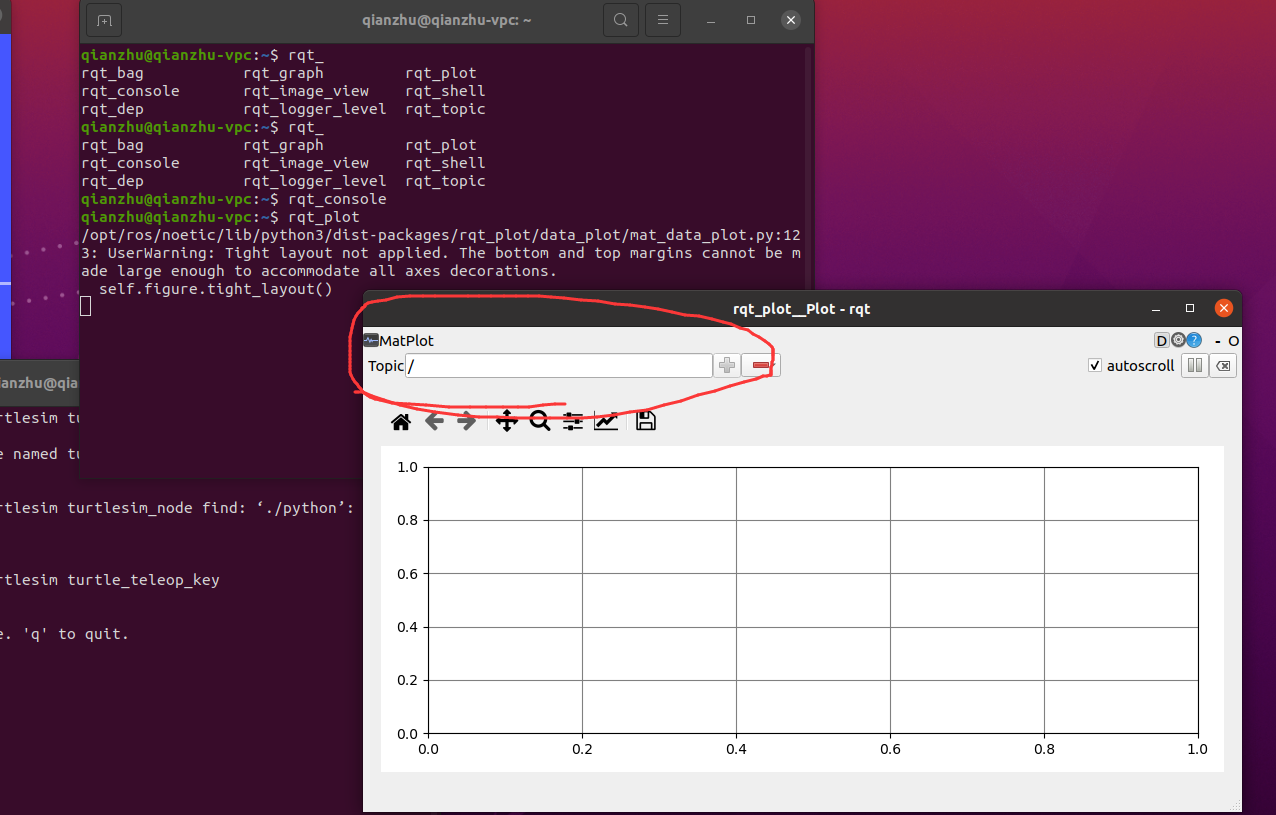
rqt_plot绘制数据曲线,下方红色花圈的地方是输入选择要订阅的信息数据;
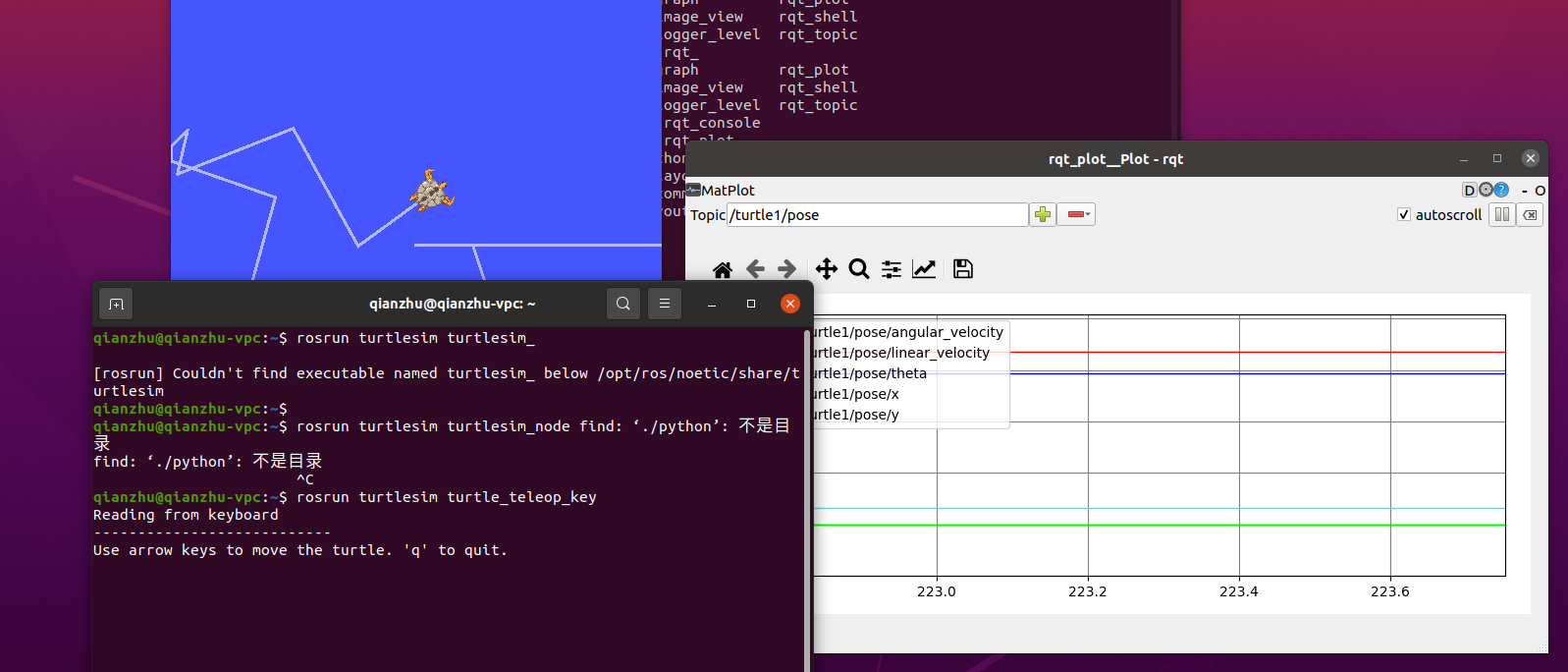
查看小海龟的位置信息;
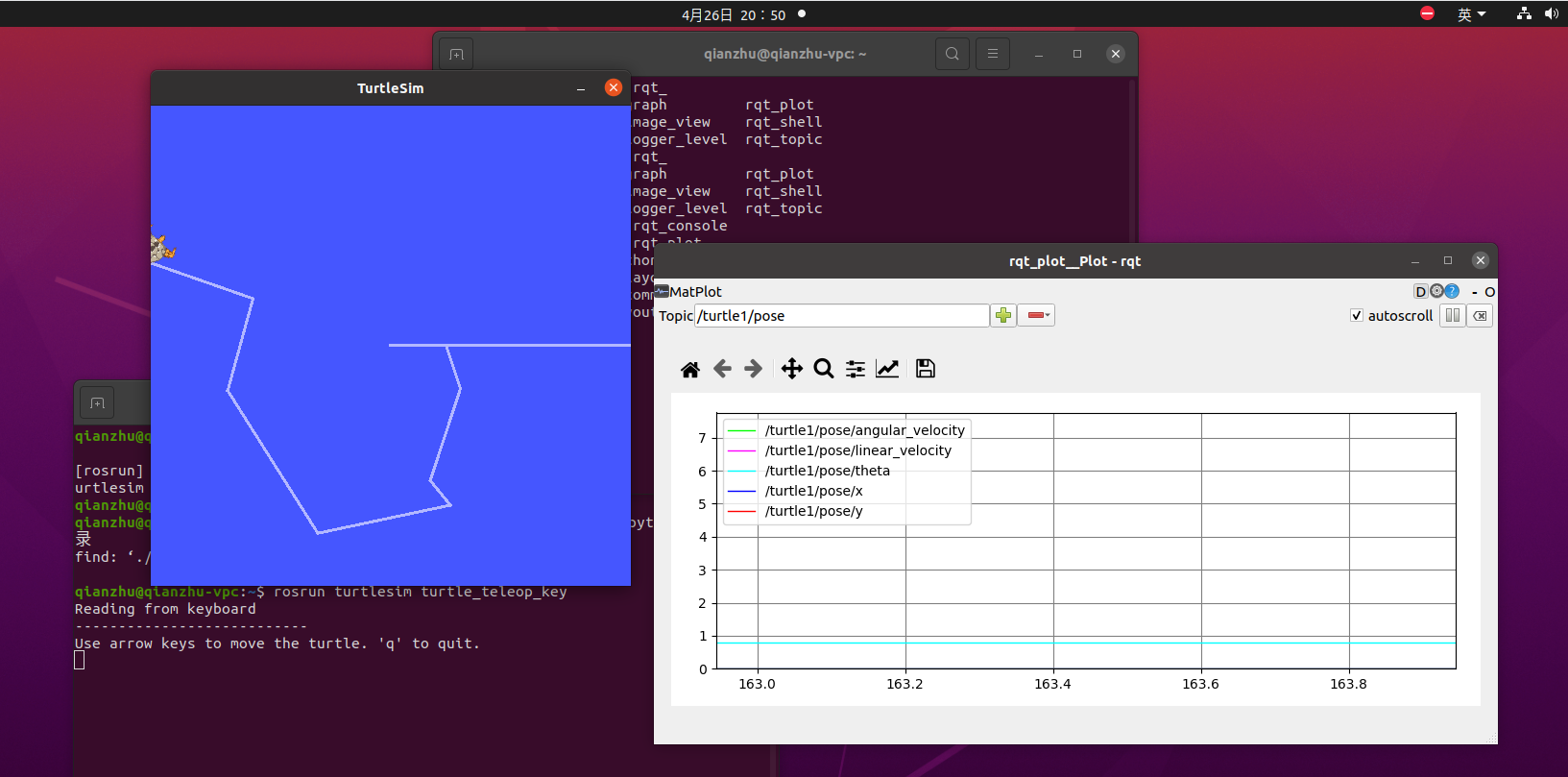
不同颜色的线代表小海龟不同的运动参数,通过这些运动参数可以直观的做相应调整
rqt_image_view显示摄像头图像
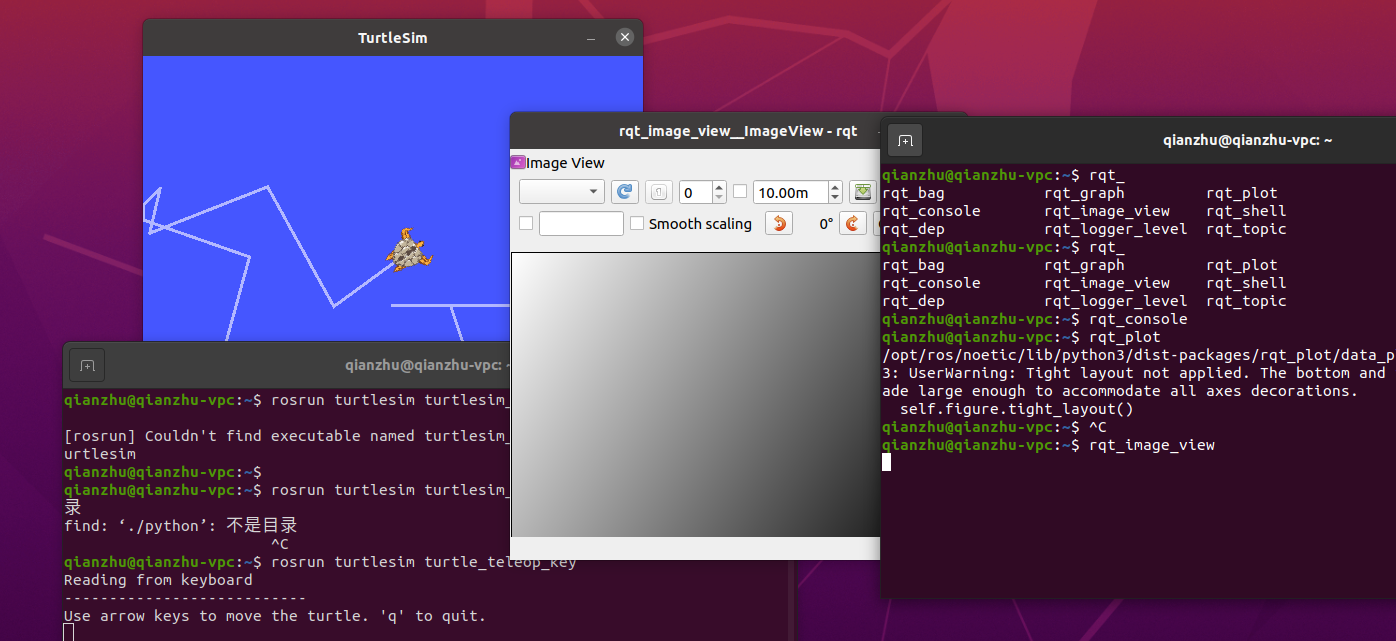
默认情况下是不存在图像的,要驱动摄像头跑起来上传摄像头图像信息,上图中的image View 下方可以选择摄像头话题信息;将话题信息渲染出来;
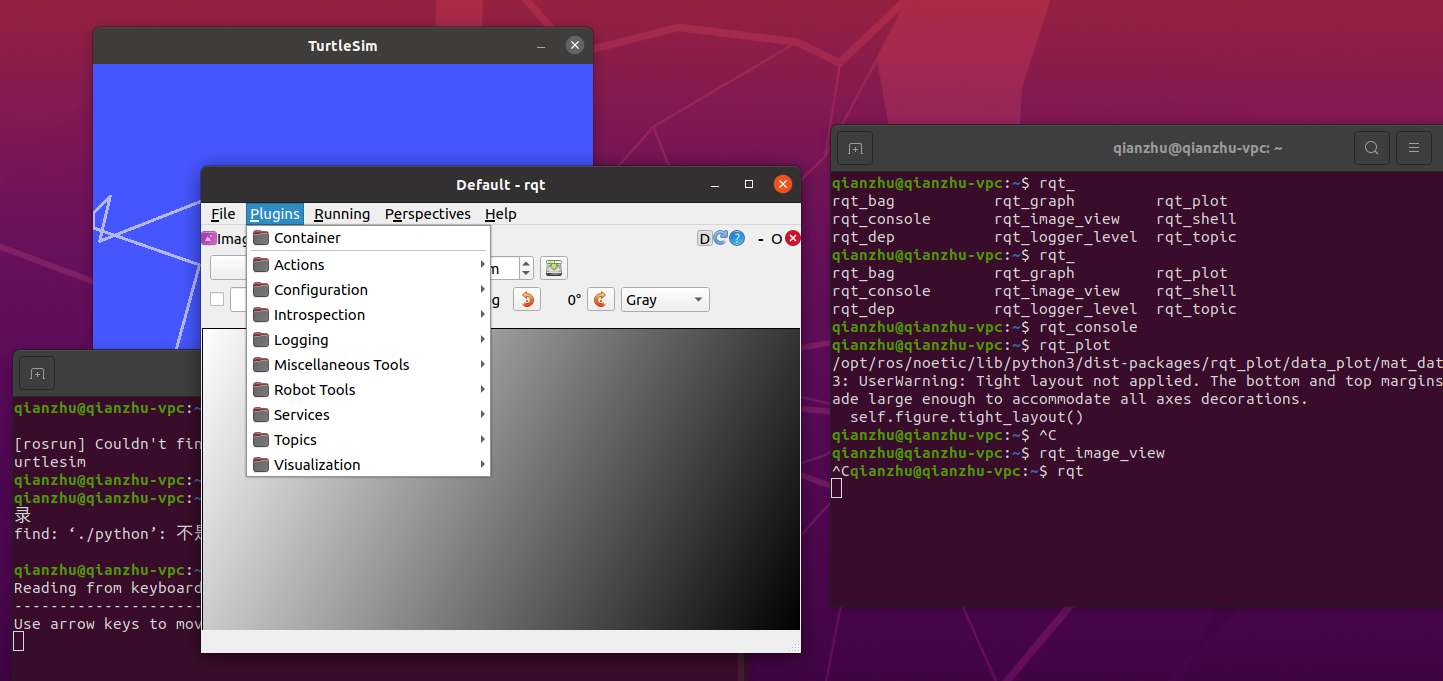
集成的rqt工具指令,直接使用rqt,里面集合了所有rqt相关的可视化程序,打开后再Plugins中选择需要的相关插件就会打开,上述的可视化工具都有集成,很方便
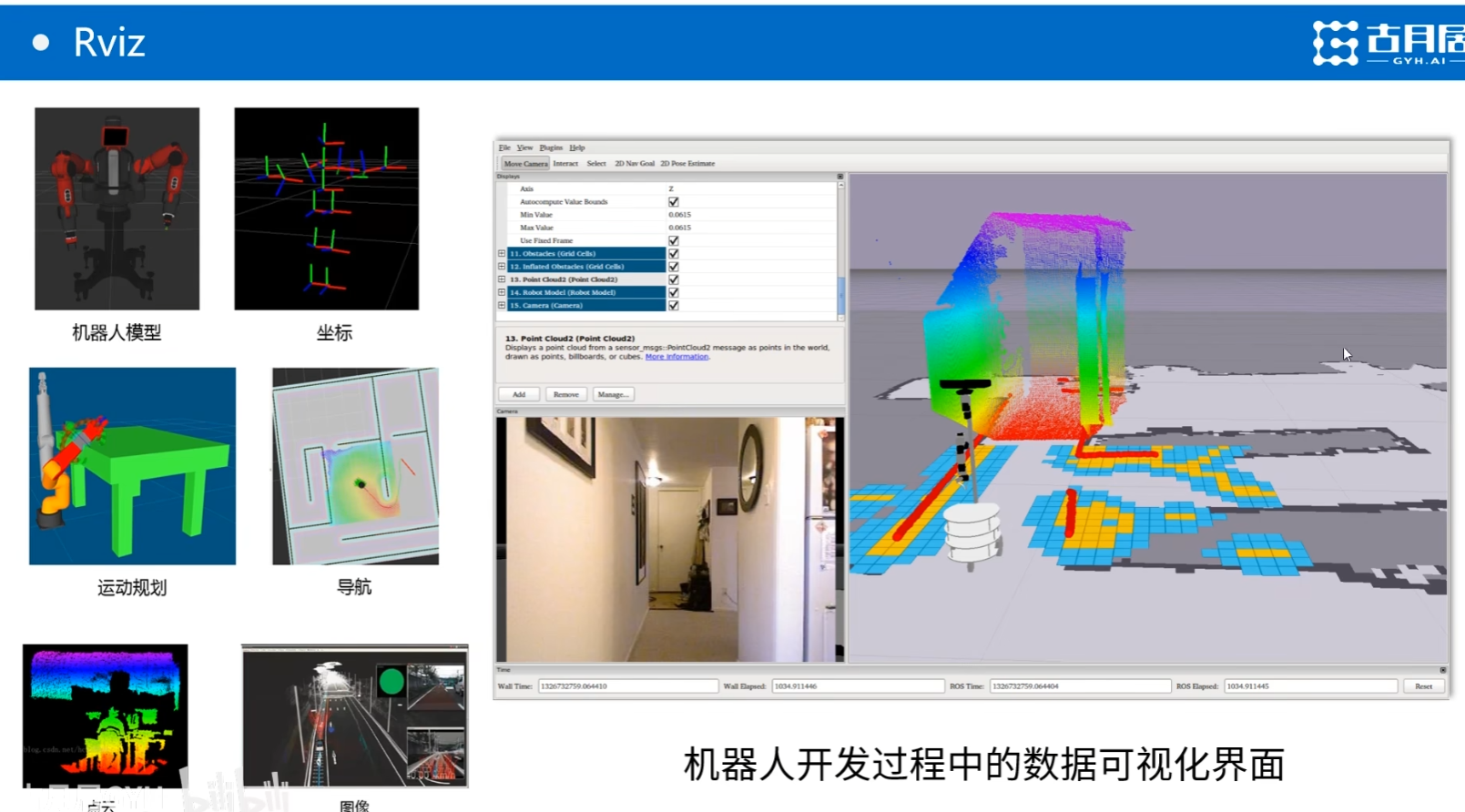
Rviz平台
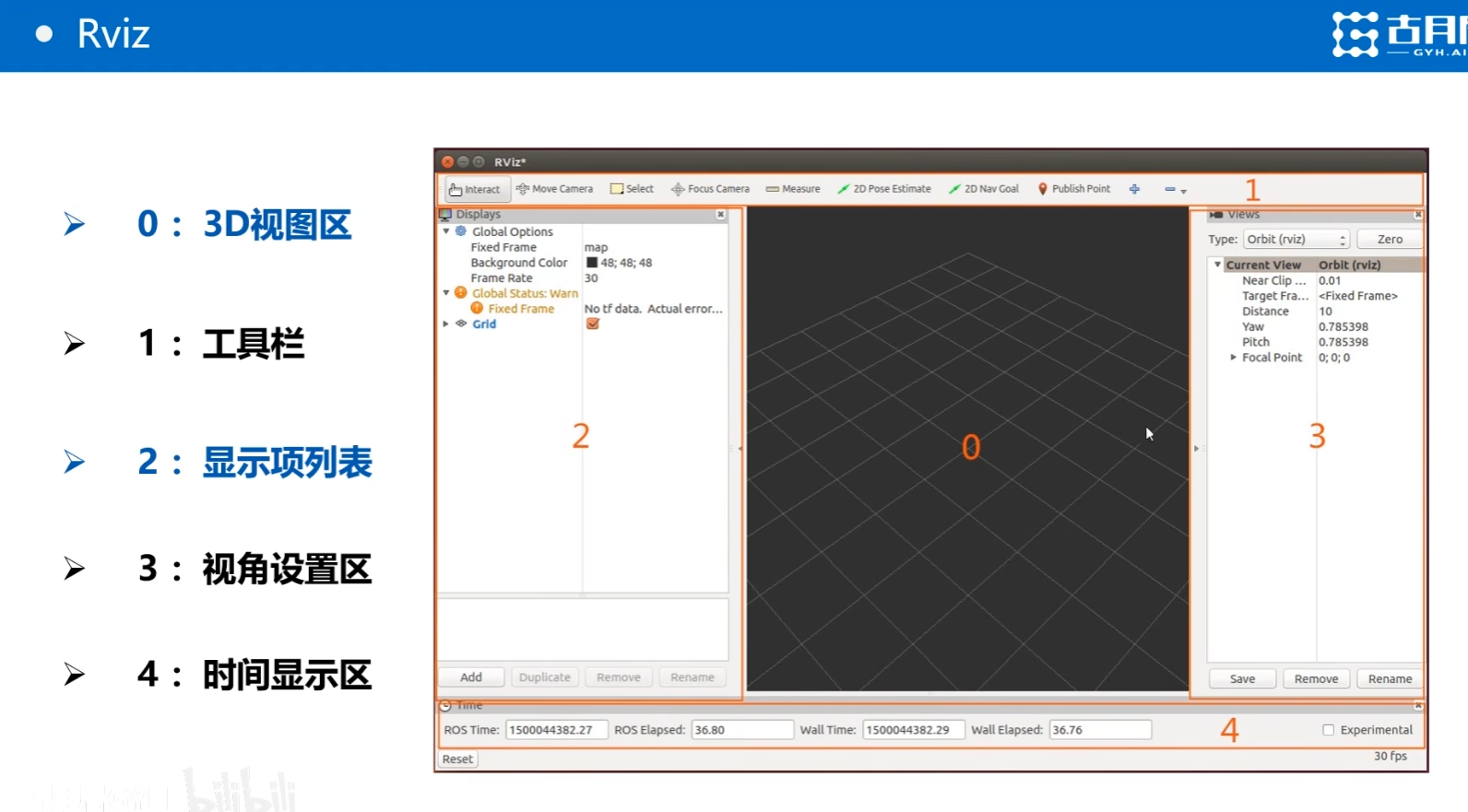
先打开roscore,再使用rosrun rviz rviz指令打开rviz平台
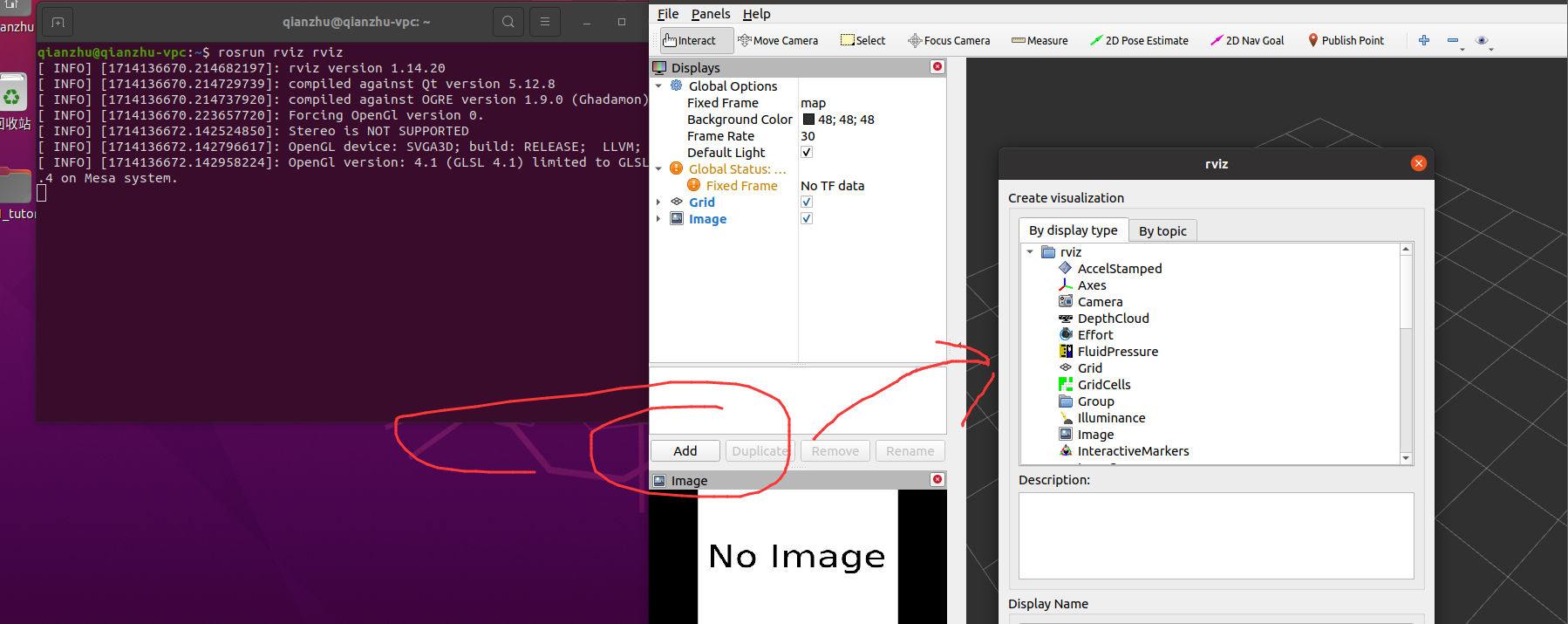
在红圈区域选择显示的东西,里面有不同的选择可视化插入
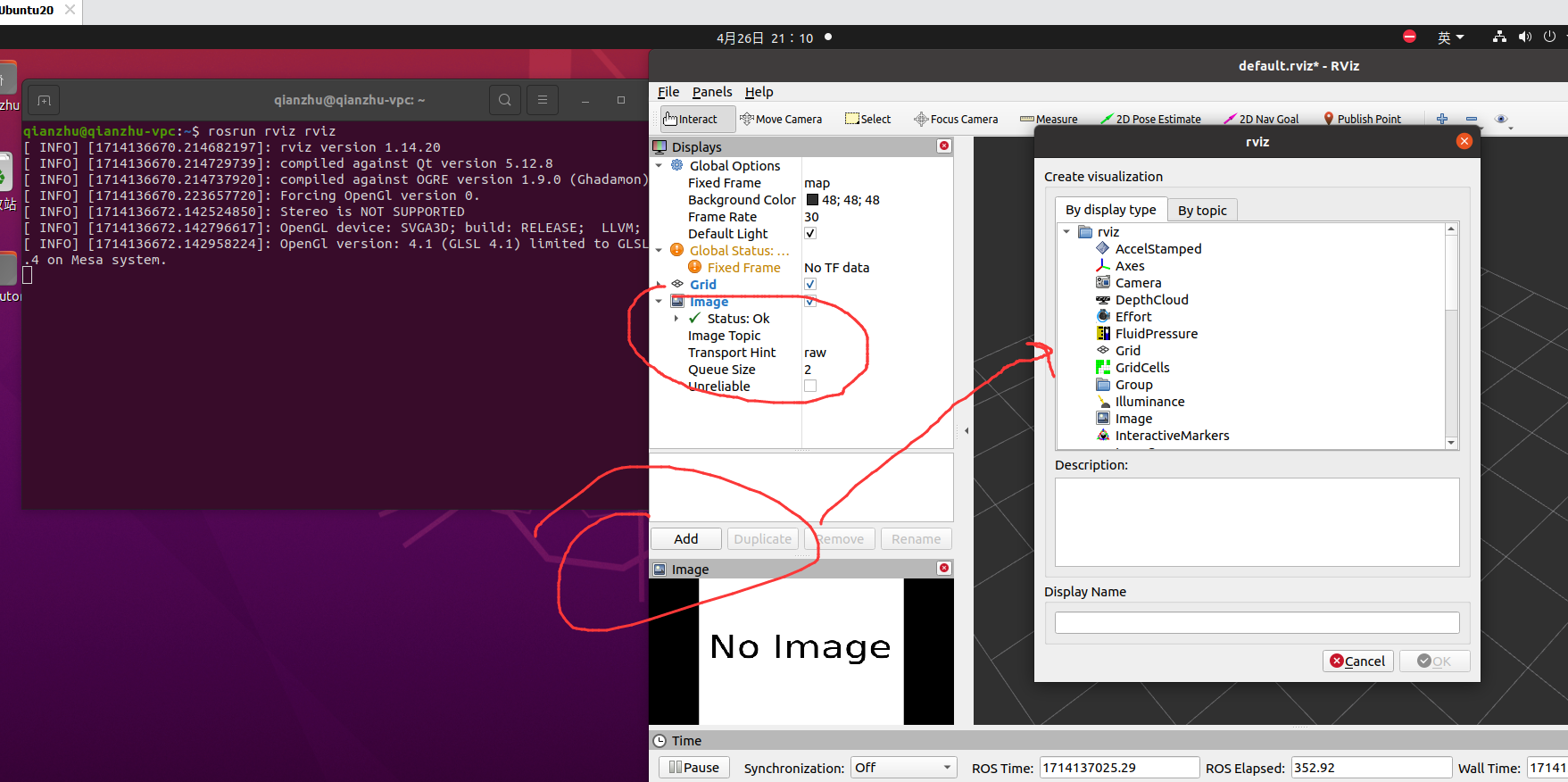
我选择图像后Grid下方出现了一个image选项,里面设置选择需要可视化的话题信息;
例如image下方出现image topic 等选项,在相应的位置填入自己设置的信息完成可视化
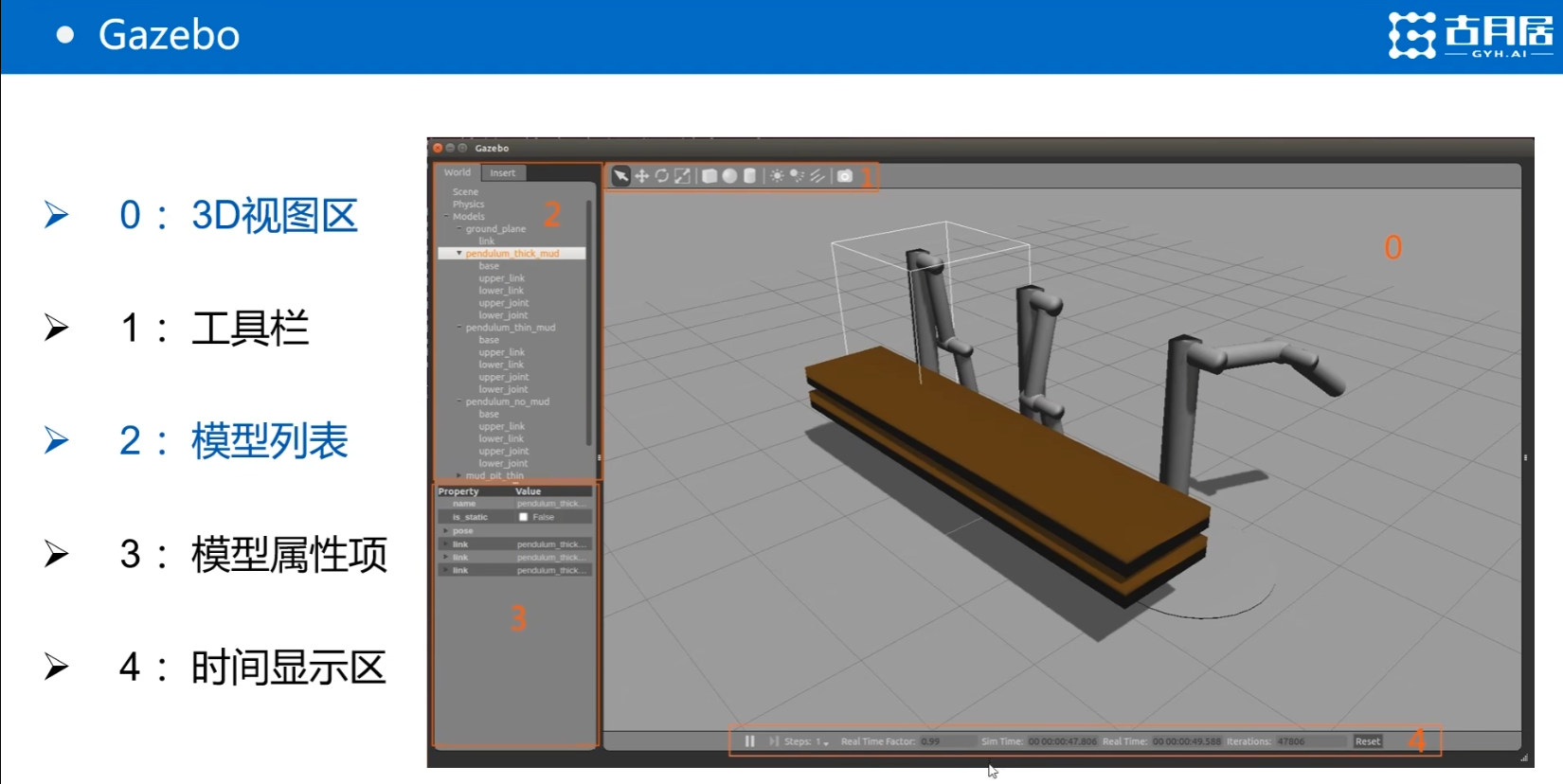
Gazebo平台:

查看Gazebo仿真环境指令:
roslaunch gazebo_ros +tab
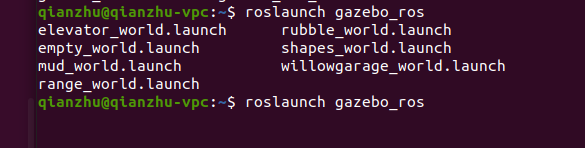
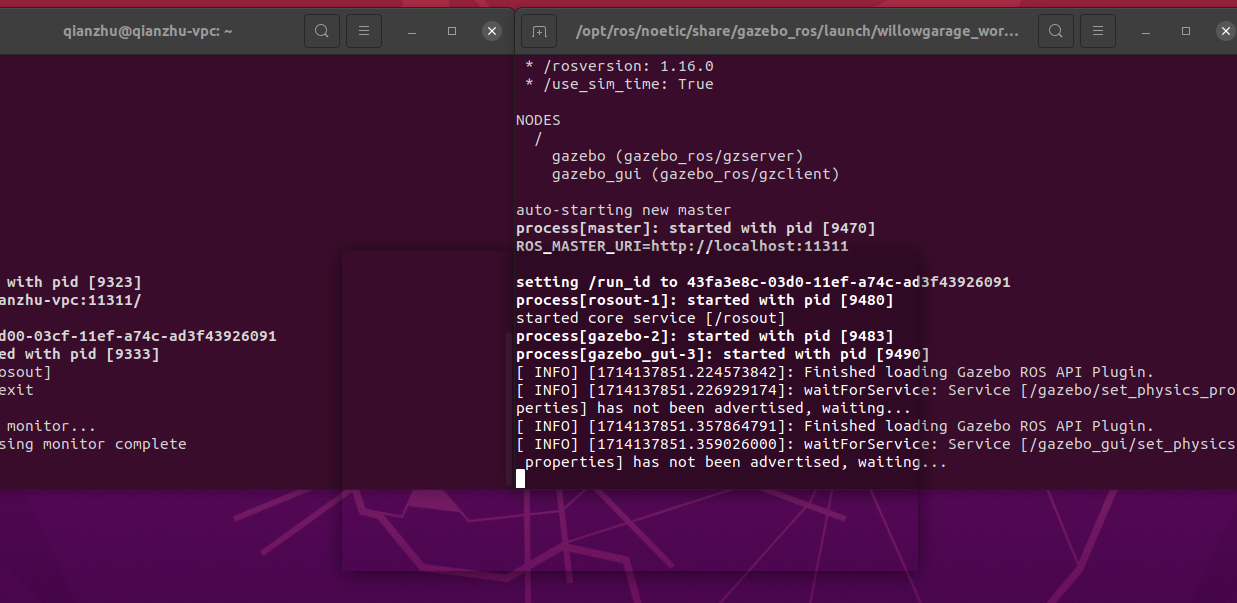
使用其中willowgarage_world.launch执行程序开跑直接gg,性能要求太高,跑不出来
三个可视化操作自己选择进一步学习


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· winform 绘制太阳,地球,月球 运作规律
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人