


学习视频:
先要安装TF功能包:
要依据自己ROS版本来安装先查询ROS版本:rosversion -d

sudo apt-get install ros-noetic-turtle-tf /*讲install后面第二个单词改为自己对应版本*/

因为版本与视频使用有所不同要增加一些指令:

sudo apt install python-is-python3
再启动launch脚本文件:
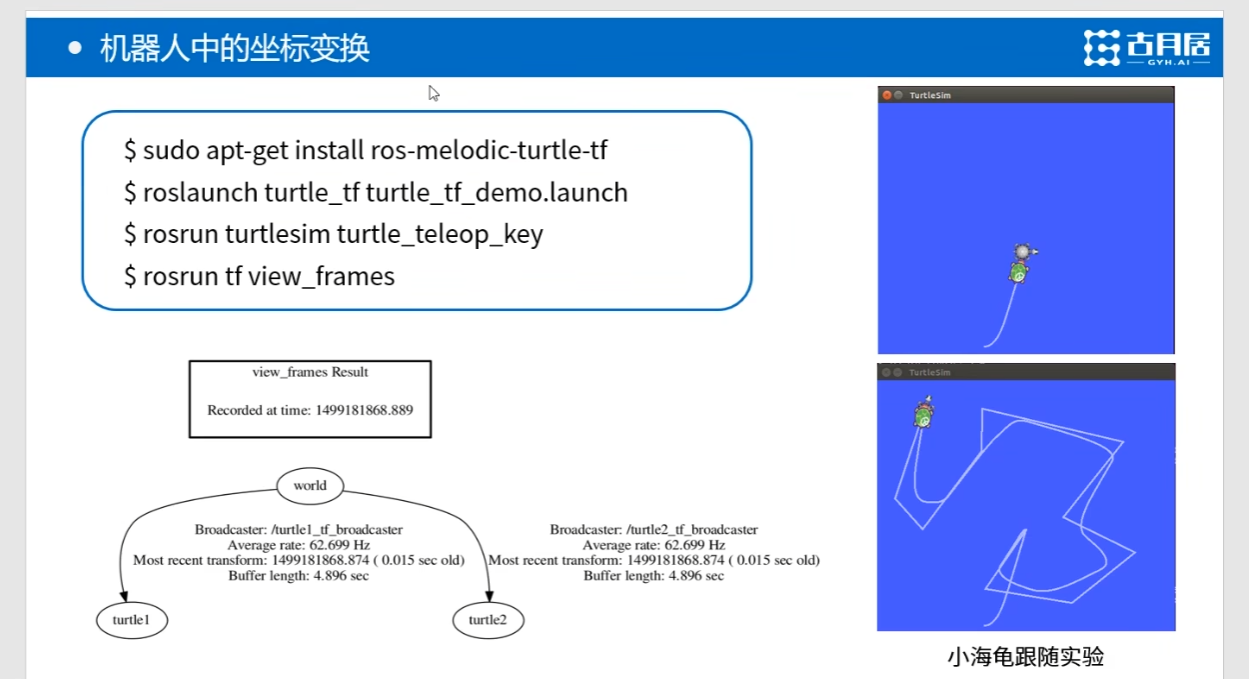
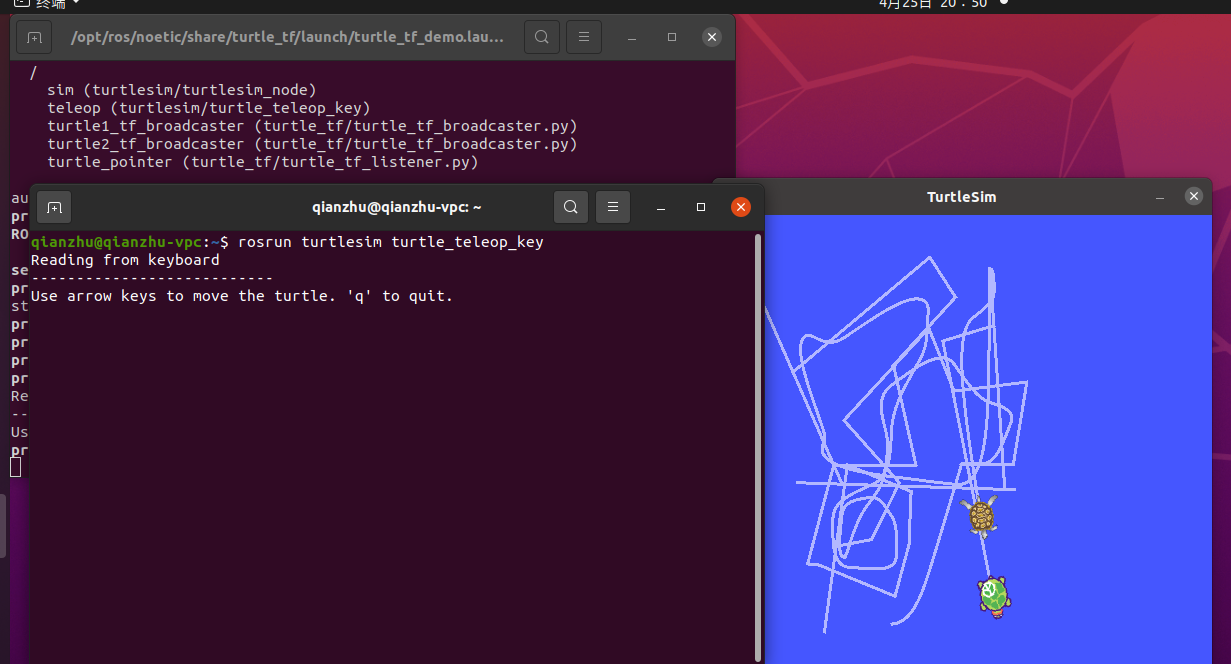
roslaunch turtle_tf turtle_tf_demo.launch
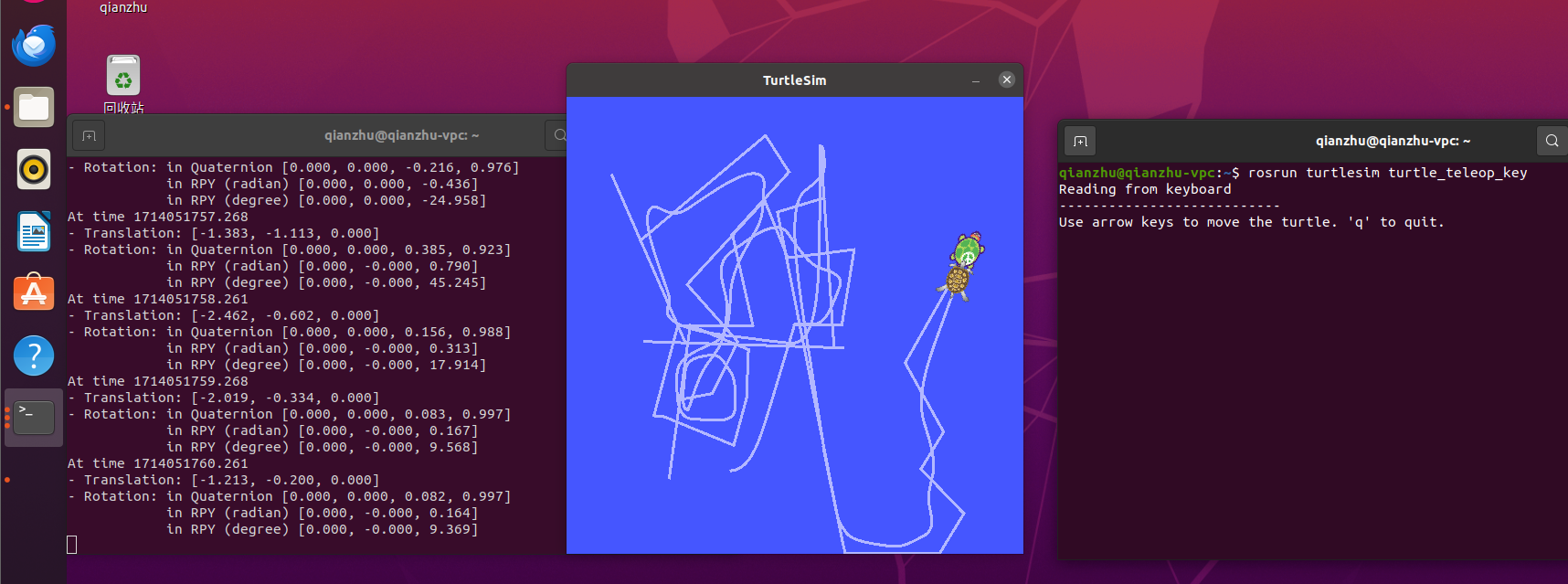
再开一个终端输入rosrun turtlesim turtle_teleop_key打开键盘控制海龟指令;
可视化查看TF之间关系指令:
rosrun tf view_frames
如果出现如下问题
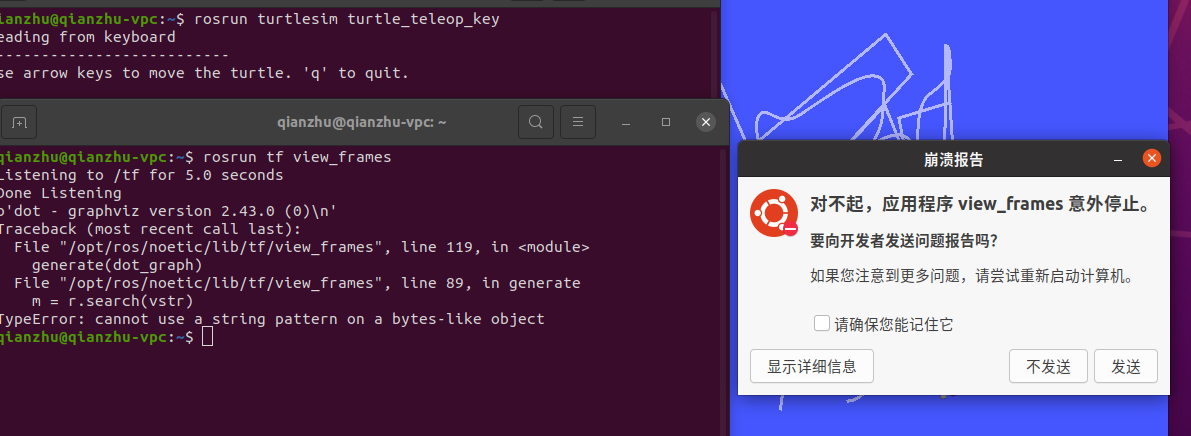
解决方法依据此博客:
ROS学习笔记(四)-----参数的使用与编程方法、ROS中的坐标系管理系统、tf坐标系广播与监听的编程实现_ros坐标参数-CSDN博客
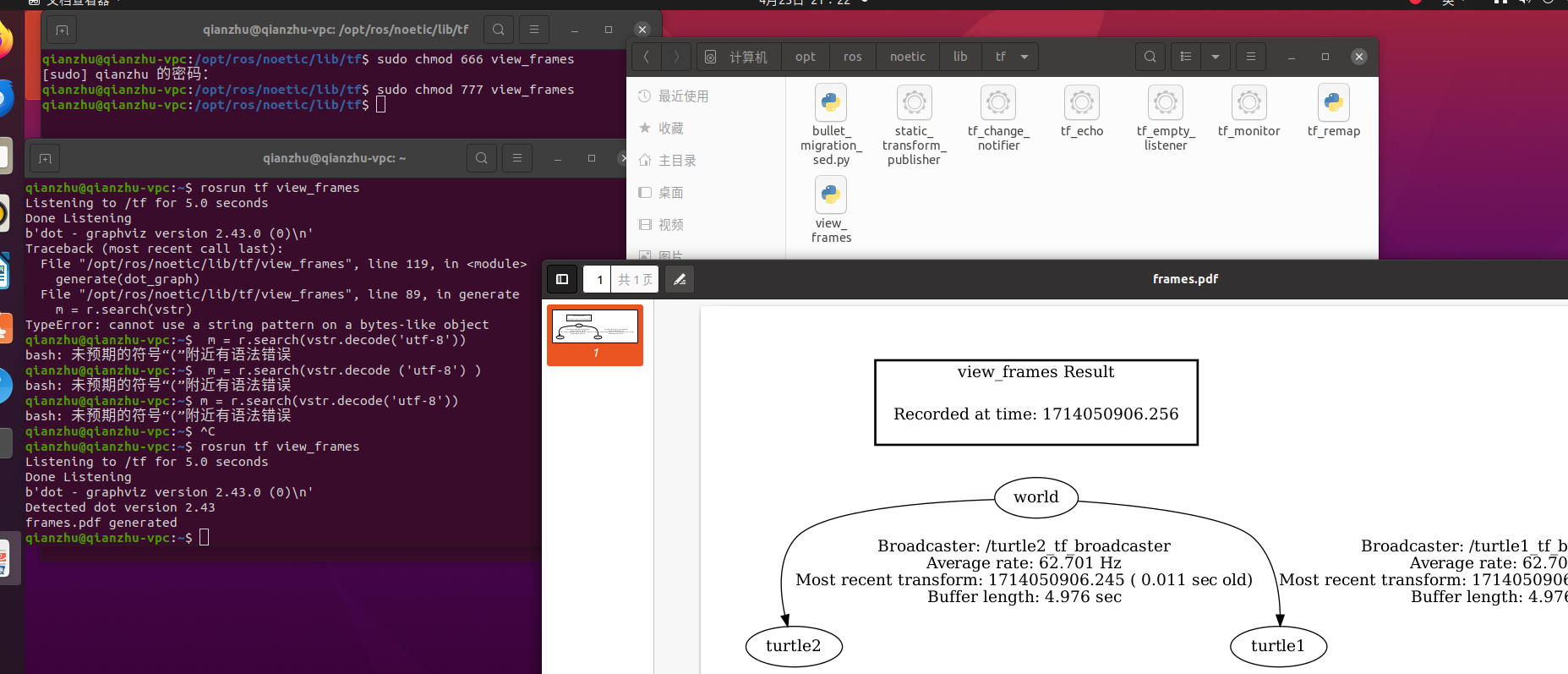
先依据显示的信息找到错误所在文件夹

在tf文件夹下打开终端输入文本可修改指令:
sudo chmod 666 view_frames
再对view_frames文件报的错误行进行修改,删掉原来的改为并保存:
m = r.search(str(vstr))
退到tf文件夹下打开终端修改回只读权限:
sudo chmod 777 view_frames
退回原来终端再输入:
rosrun tf view_frames即可生成可视化PDF
更直观的查询坐标系之间的变换方式:
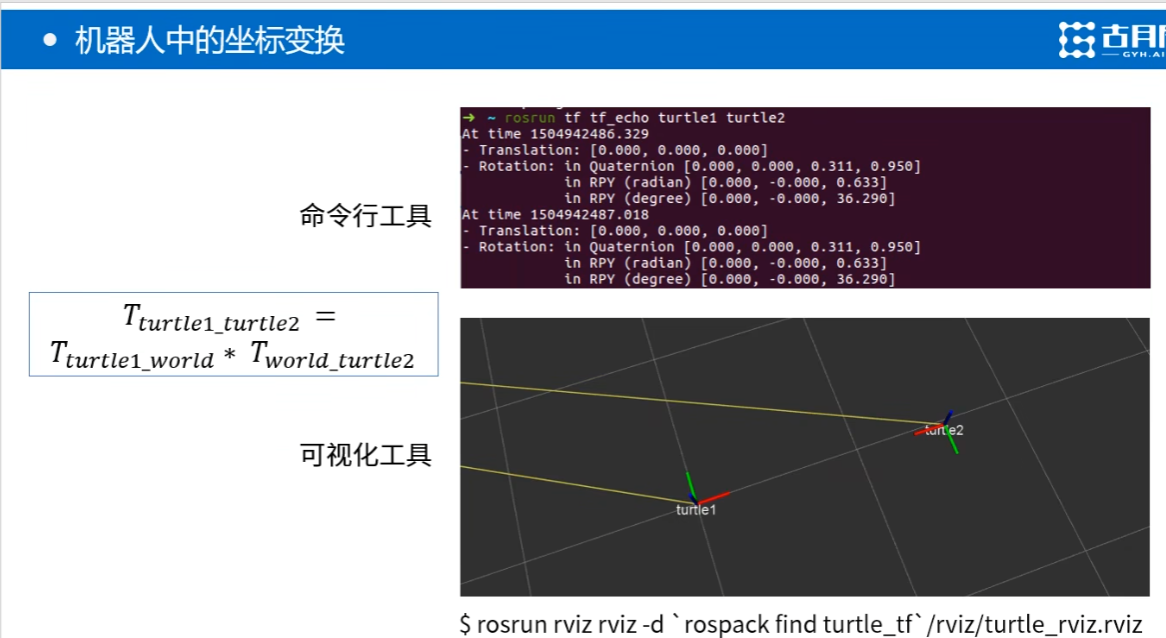
rosrun tf tf_echo turtle1 turtle2 使用后两个坐标系之间数据会发生实时变化;
Quaternion为四元数描述姿态;
RPY (radian)通过xyz三轴旋转通过弧度来描述;
RPY (degree)通过三个坐标系的角度来描述;
更可视化的指令:
rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
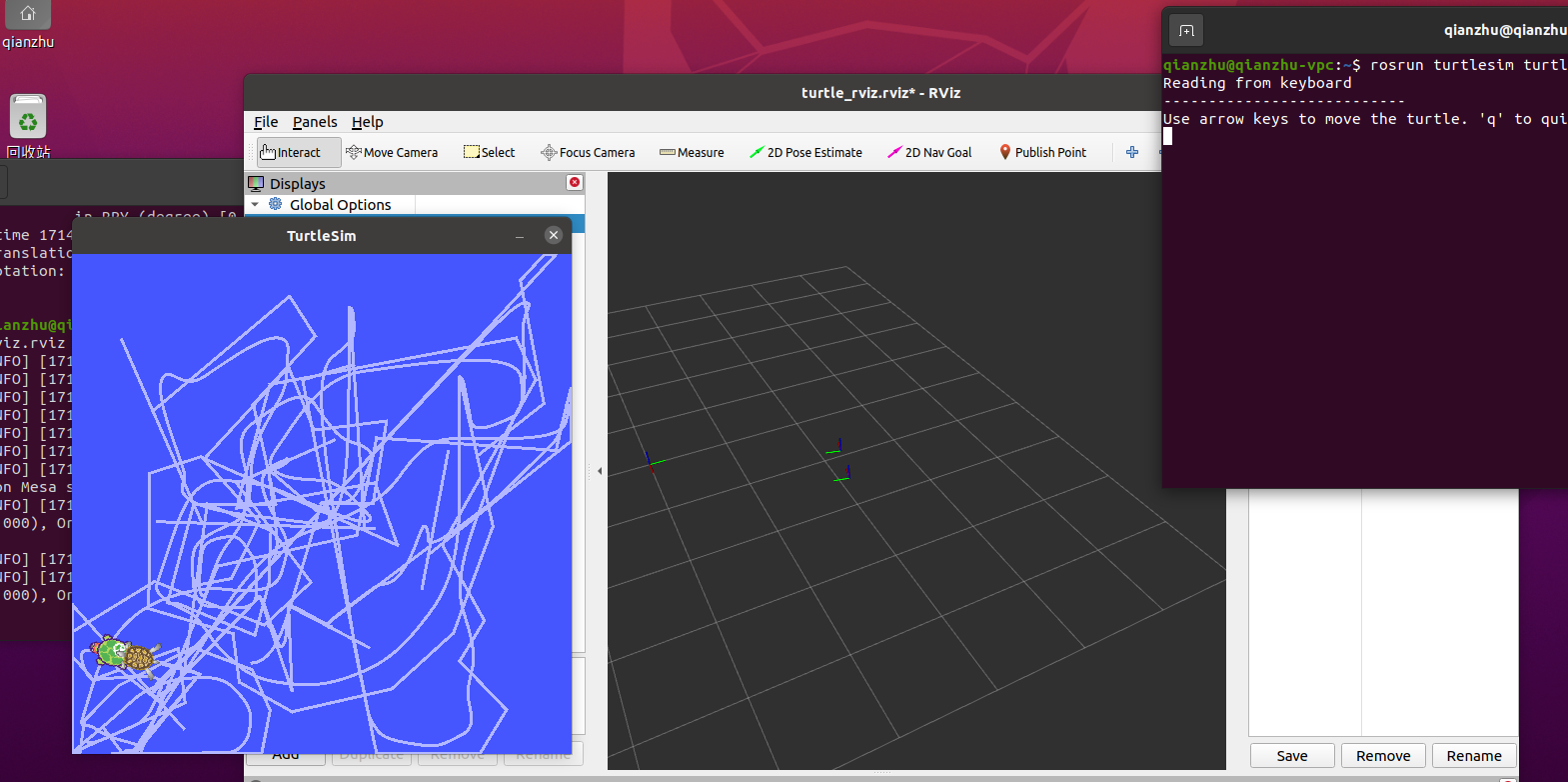
非常可视化;


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 【杭电多校比赛记录】2025“钉耙编程”中国大学生算法设计春季联赛(1)