

学习视频:
9.创建工作空间与功能包_哔哩哔哩_bilibili
工作空间:
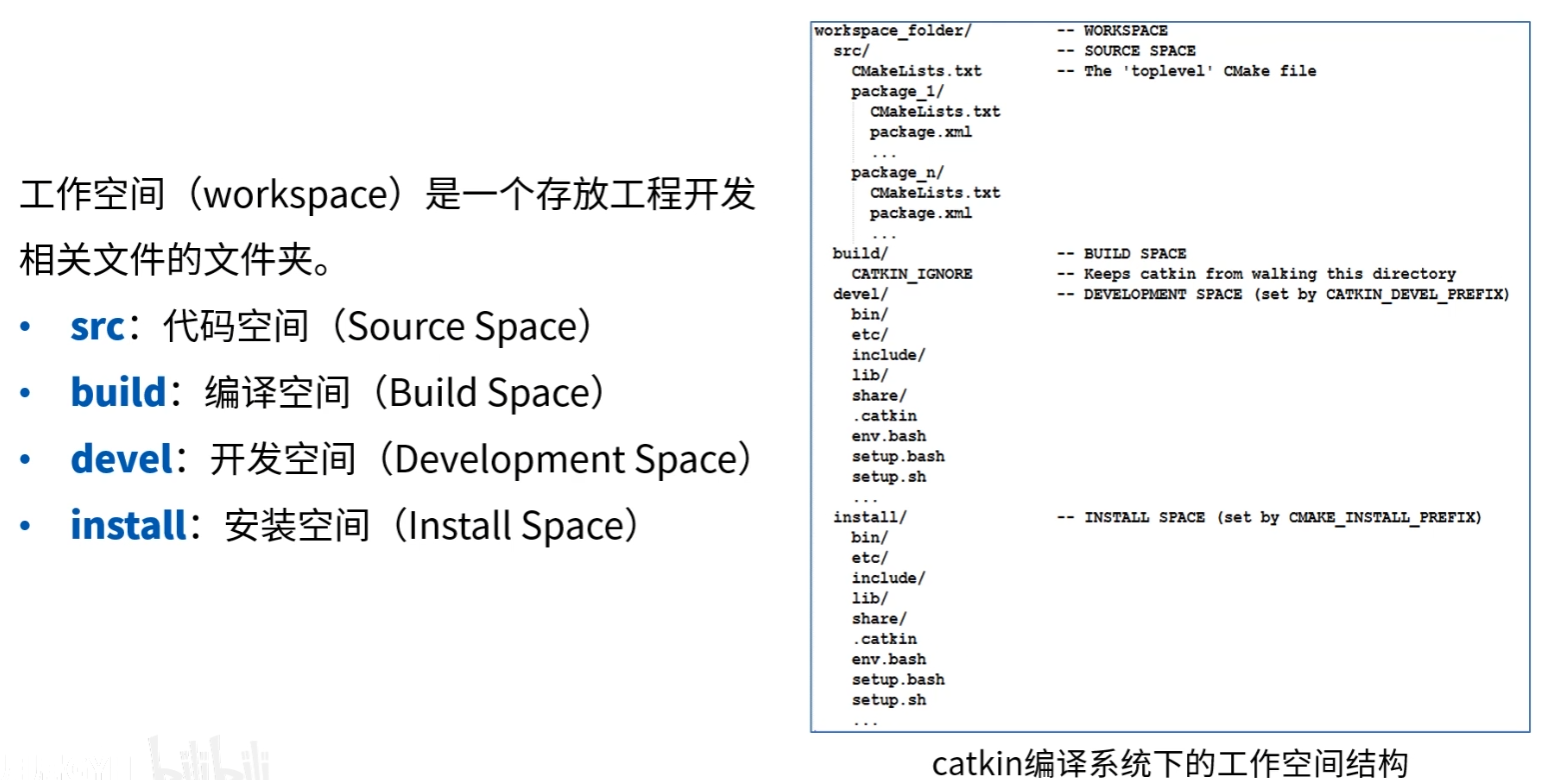
src:
放置源码的空间
build:
放置代码编译过程中产生中间的文件
devel:
放置编译生成的可执行文件,一些库脚本等等。最终编译文件存放地点。
install:
安装位置。
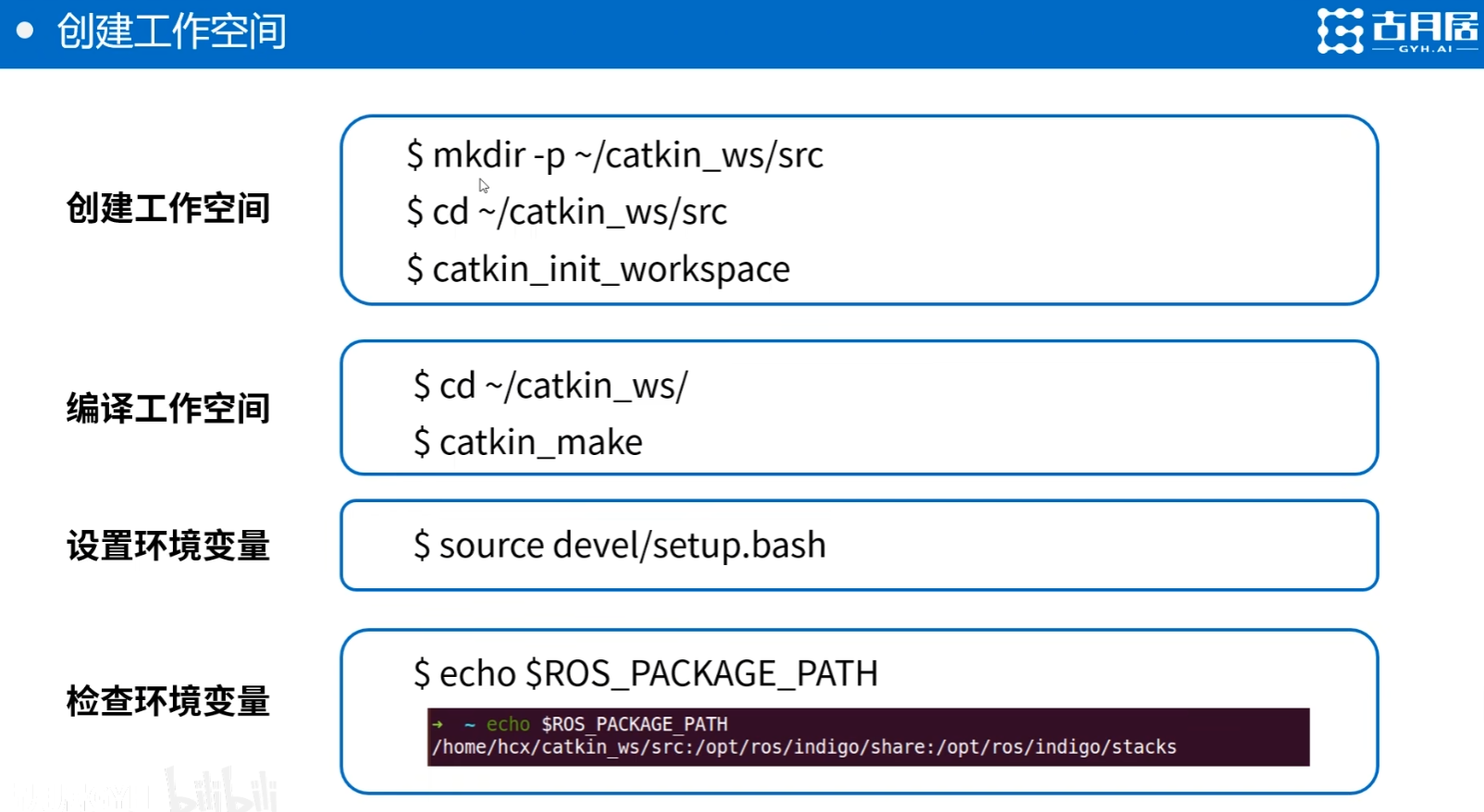
上图中catkin_ws是替代名,第一个指令其实就是创建一个文件夹同时在文件夹内部创建一个src文件夹
创建工作空间:
第一步就是先创建一个文件夹,在文件夹内再创建一个名为src的文件夹
然后进入src空间初始化src空间
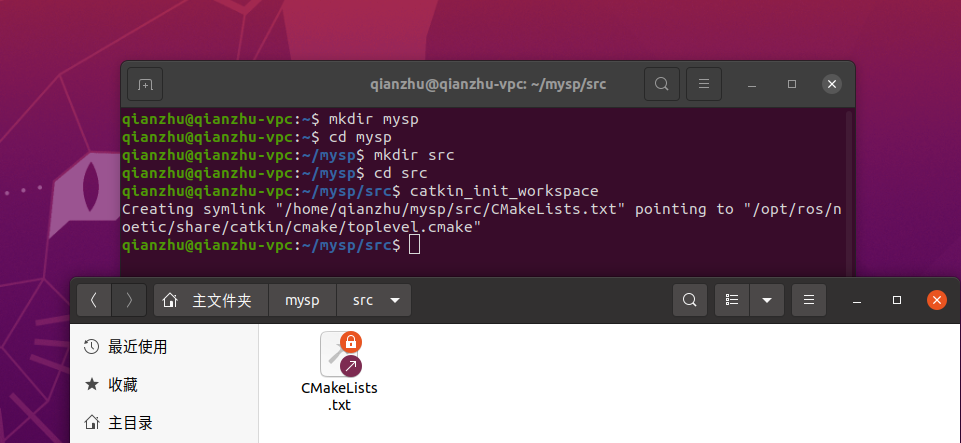
完成初始化后会再src空间中产生一个TXT文档。
在上述src空间中放置源码;
后续进行编译,退回这个src文件夹的上级进行编译;
通过catkin_make 指令,会根据src内部源码及配置自行编译;
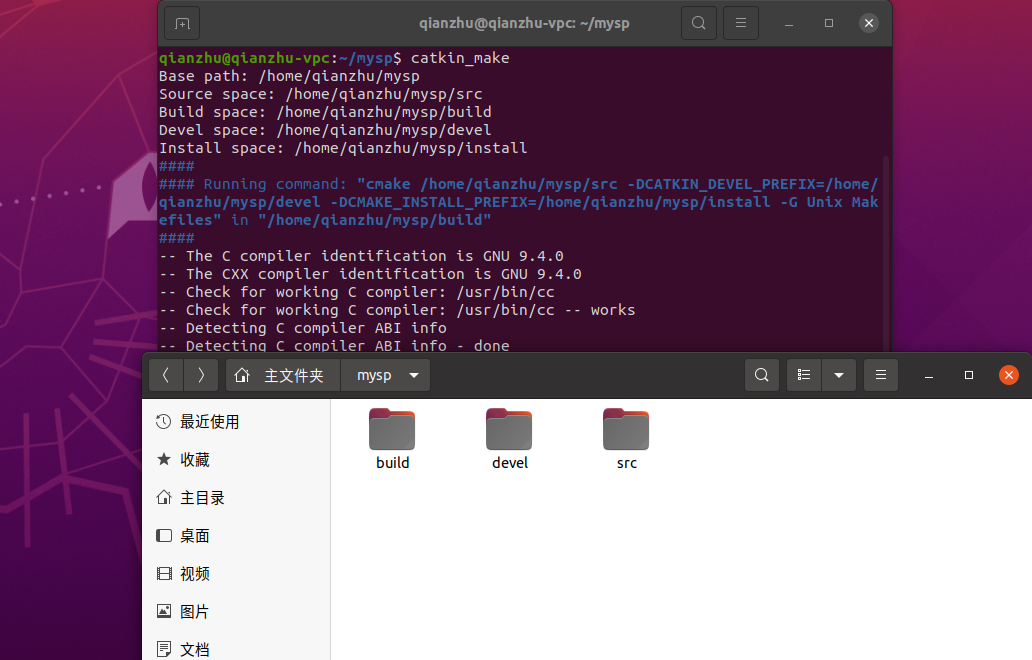
由上图可视,并没有产生install空间,所以还要运行一个指令catkin_make install产生install空间才完成一个创建工作空间

创建功能包:
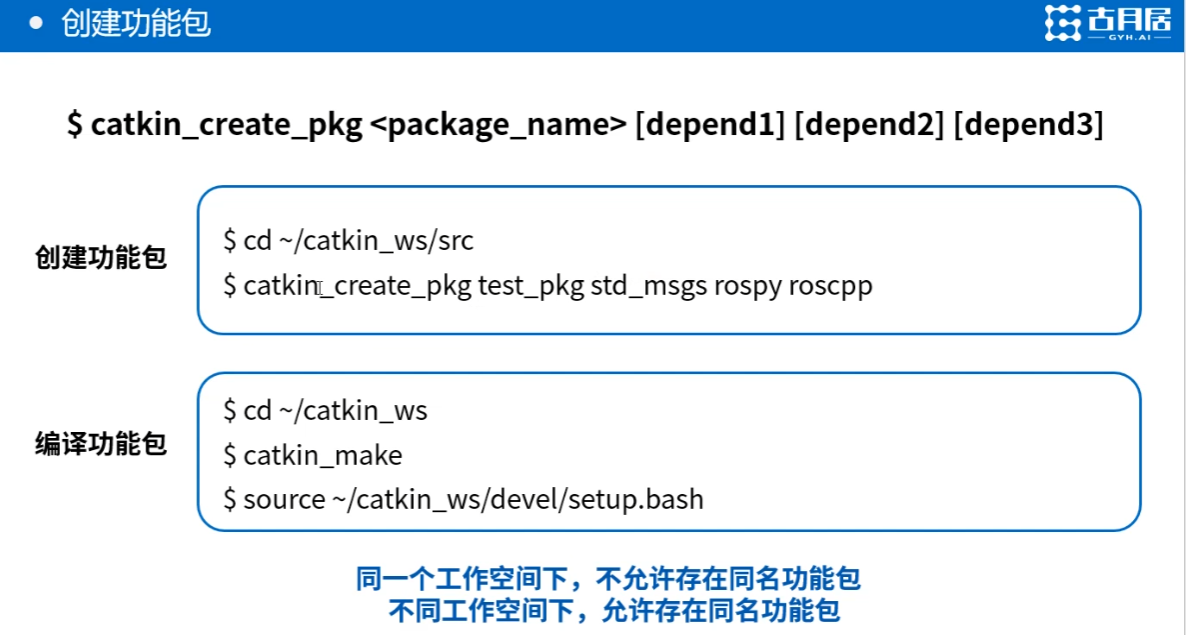
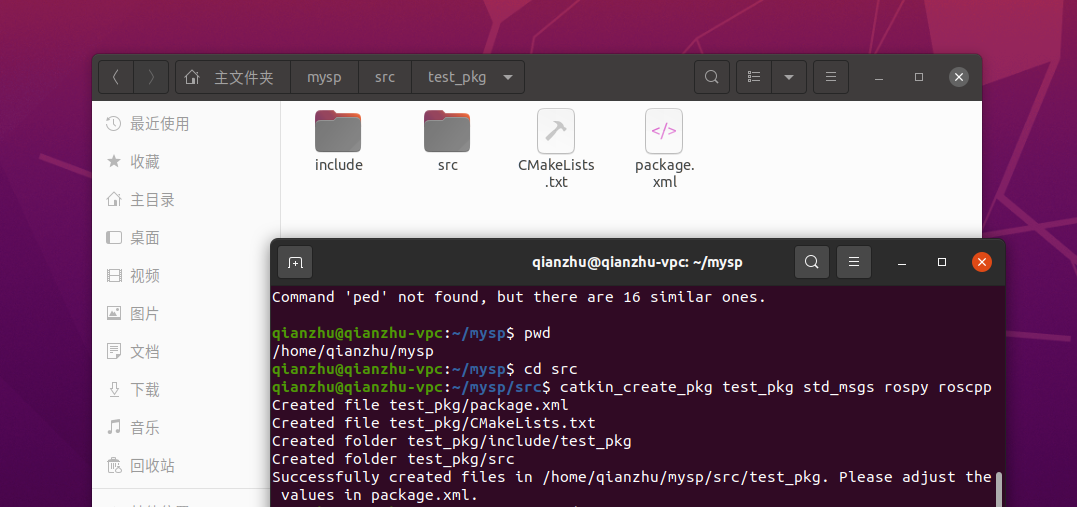
进入src空间
输入 catkin_create_pkg +自定义功能包名 +依赖
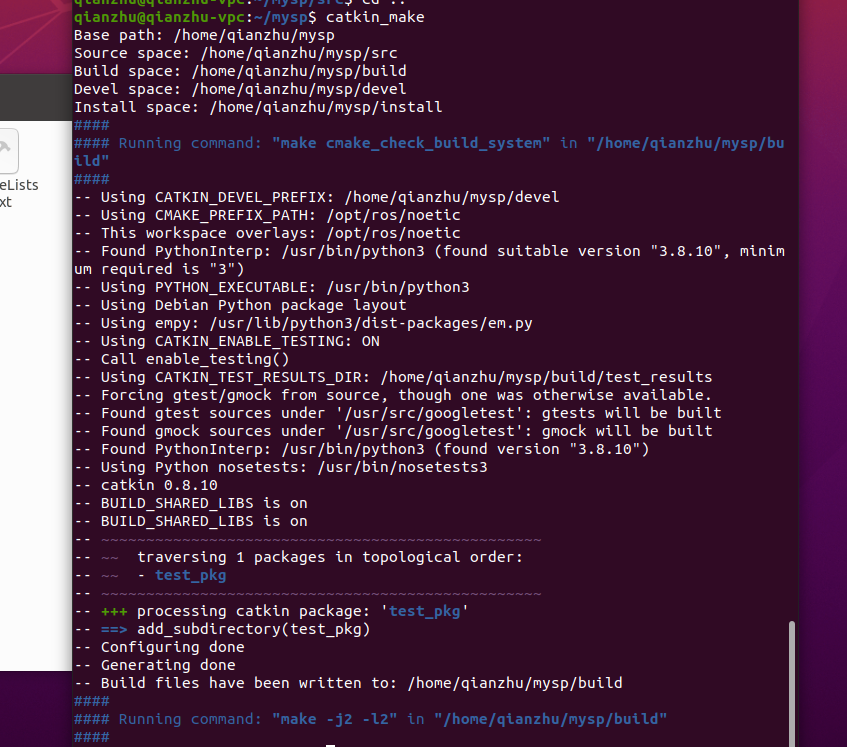
创建完功能包后续编译功能包还是需要退出到最初目录进行catkin_make指令进行编译;
编译完成后后续要运行功能包中某一个程序的话,需要先设置一下工作空间的环境变量,设置环境变量后才能让系统找到我们的工作空间,并且找到工作空间对应到的一些功能包;
source devel/setup.bash

检查环境变量指令:
echo $ROS_PACKAGE_PATH
指令可以通过环境变量查找所有功能包的路径;

通过路径才能找到你写的功能包;
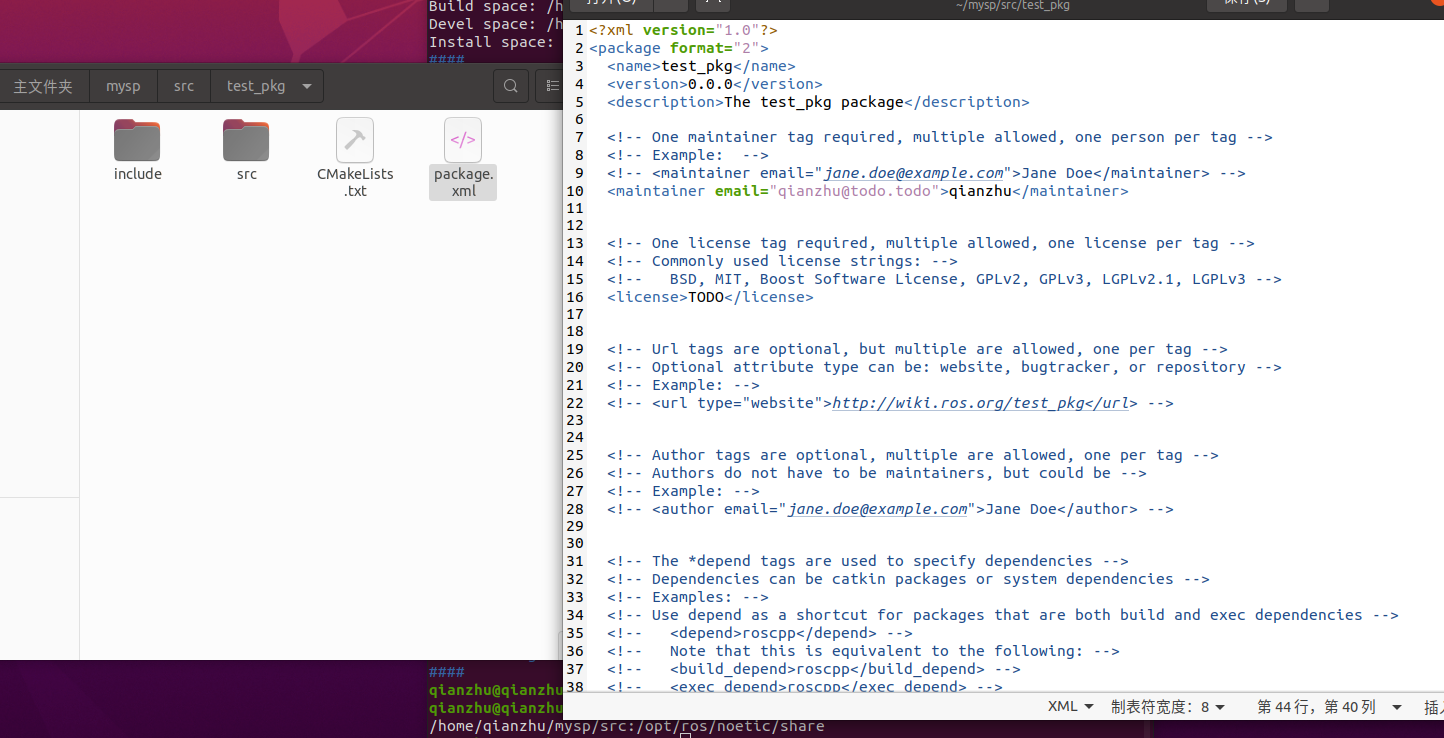
功能包中的package.hxml
可以通过这个查询你的版本信息,邮箱地址,还有手动添加一些依赖等等
功能包中的CMakeLists.txt用于描述功能包中的编译规则;


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· winform 绘制太阳,地球,月球 运作规律
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人