

学习视频:
RSO 指令:
(1)rqt_graph :
快速可视化节点关系
在运行小海龟的时候可以再开一个终端就可以可视化两个节点之间关系;
eg:

上图可以看出从键盘节点输入信息最后运用在海龟图像节点上,这是他们之间的通讯关系,中间的/turtle1/cmd_vel就是他们的通讯话题;
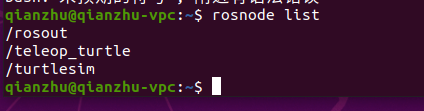
(2)rosnode list:
列出系统全部节点;
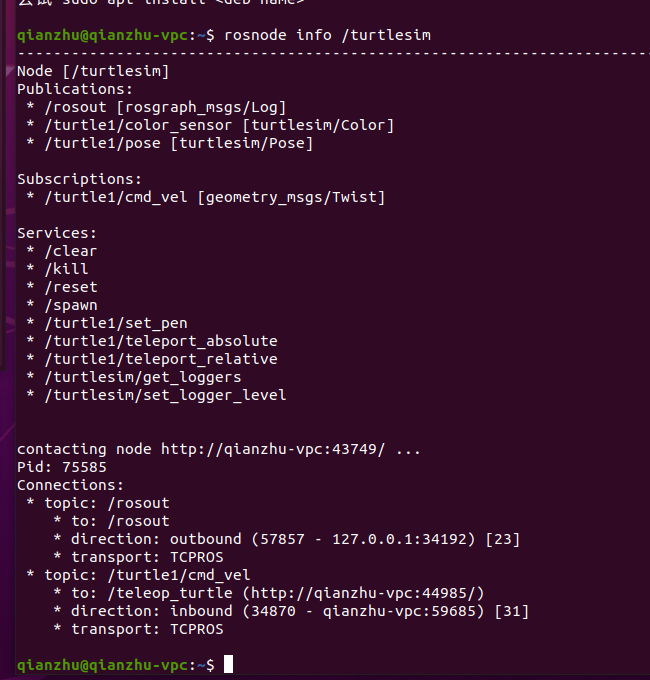
(3)rosnode info +节点:
查看节点具体信息
eg:
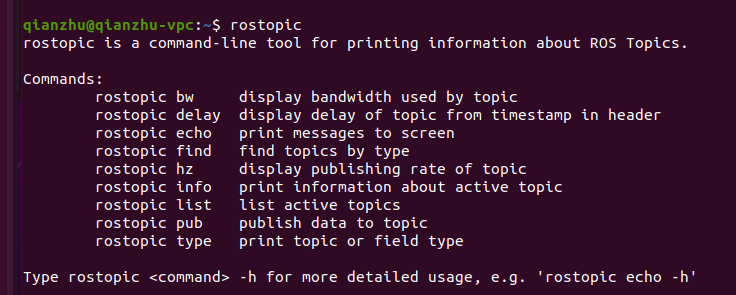
(3)rostopic :
话题操作;
输入rostopic会告诉你有哪些操作如下;
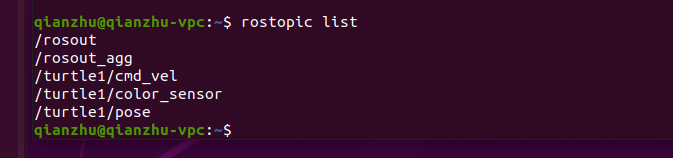
rostopic list:
显示话题列表;
对话题传输数据:rostopic pub
rostopic pub +话题名 +消息名 +消息结构 (合理使用TAB键帮助我们自动推断后续信息)
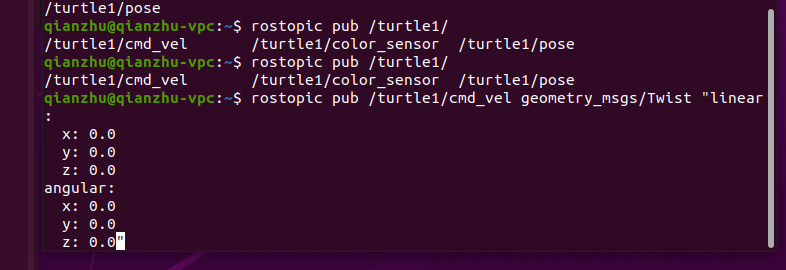
对上面所要传输信息值进行修改,上面是传输小海龟运动的话题数据,linear表示线速度,angular 表示角速度;
这样只能传输一次消息,也就只会移动一次,如果需要循环一直传要多输入 pub -r +频率数值

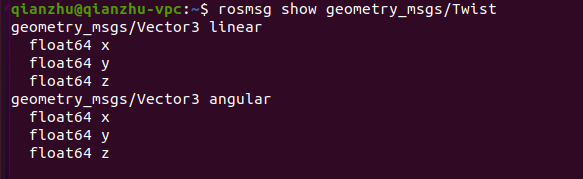
展示话题消息数据的结构定义
rosmsg show +消息名
(3) rosservice (服务):
查看服务列表:
rosservice list
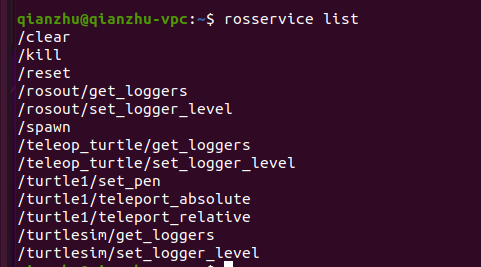
根据上面的服务列表内部存在一个/spawn 服务,这用于再页面内再生成一个海龟;
调用上面服务的格式要多加一个call(请求)+结构数据
eg:还是灵活使用Tab键便于自动弹出结构;
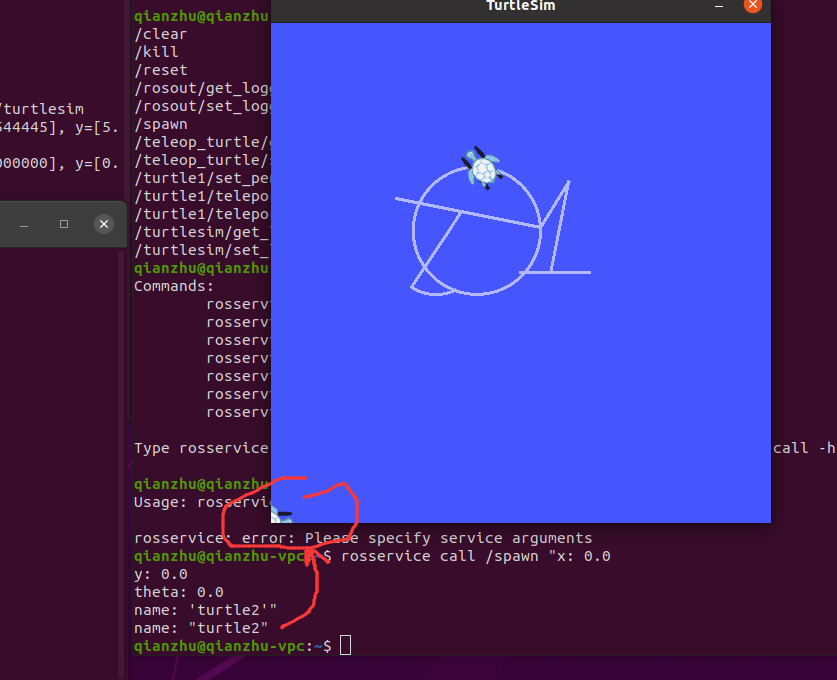
此时再查看话题列表就出现了海龟2的话题
通过不同对话题的调用进行对不同海龟的操作;
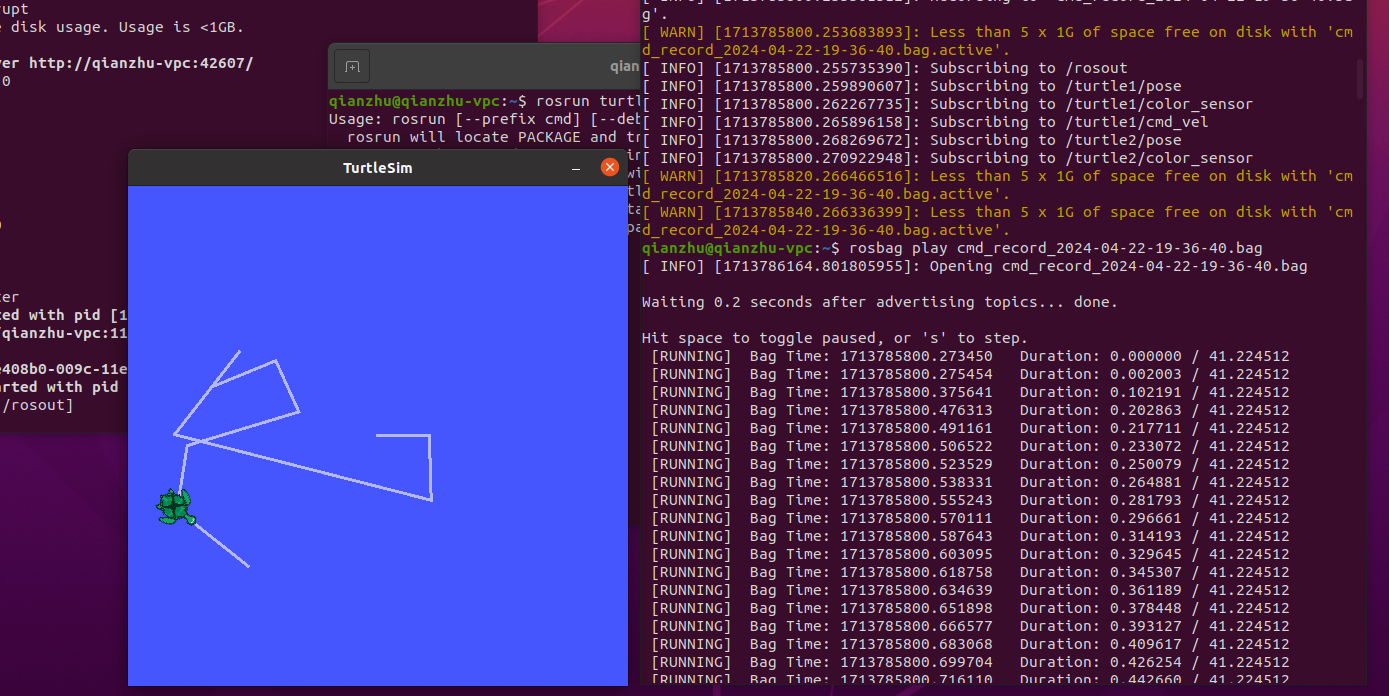
(4)记录运行数据及复现运行数据:
rosbag record -a -O +对于记录数据的名字 (-a是将所有数据都记录,-O是保存为压缩包形式)
在相同界面复现运行的数据:
rosbag play +文件名字


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· winform 绘制太阳,地球,月球 运作规律
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人