

PID介绍
PID 是 Proportional(比例)、Integral(积分)、Differential(微分)的首字母缩写;是一种结合比例、积分和微分三种环节于一体的闭环控制算法。PID 控制的实质是对目标值和实际值误差进行比例、积分、微分运算后的结果用来作用在输出上。
比例 (P)
比例控制是最简单的一种控制方式,成比例的反应控制系统中输入与输出的偏差信号,只要偏差一旦产生,就立即产生控制的作用来减小产生的误差。比例控制器的输出与输入成正比关系,能够迅速的反应偏差,偏差减小的速度取决于比例系数 Kp,Kp 越大偏差减小的就越快,但是极易引起震荡;Kp 减小发生震荡的可能性减小,但是调节的速度变慢,单纯的比例控制存在不能消除的静态误差,这里就需要积分来控制。
积分(I)
在比例控制环节产生了静态误差,在积分环节中,主要用于就是消除静态误差提高系统的无差度。积分作用的强弱,取决于积分时间常数 Ti,Ti 越大积分作用越弱,反之则越强。积分控制作用的存在与偏差 e(t) 的存在时间有关,只要系统存在着偏差,积分环节就会不断起作用,对输入偏差进行积分,使控制器的输出及执行器的开度不断变化,产生控制作用以减小偏差。在积分时间足够的情况下,可以完全消除静差,这时积分控制作用将维持不变。Ti 越小,积分速度越快,积分作用越强。积分作用太强会使系统超调加大,甚至使系统出现振荡。
微分(D)
微分环节的作用是反应系统偏差的一个变化趋势,也可以说是变化率,可以在误差来临之前提前引入一个有效的修正信号,有利于提高输出响应的快速性, 减小被控量的超调和增加系统的稳定性,虽然积分环节可以消除静态误差但是降低了系统的响应速度,所以引入微分控制器就显得很有必要,尤其是具有较大惯性的被控对象使用 PI 控制器很难得到很好的动态调节品质,系统会产生较大的超调和振荡,这时可以引入微分作用。在偏差刚出现或变化的瞬间,不仅根据偏差量作出及时反应(即比例控制作用),还可以根据偏差量的变化趋势(速度)提前给出较大的控制作用(即微分控制作用),将偏差消灭在萌芽状态,这样可以大大减小系统的动态偏差和调节时问,使系统的动态调节品质得以改善。微分环节有助于系统减小超调,克服振荡,加快系统的响应速度,减小调节时间,从而改善了系统的动态性能,但微分时间常数过大,会使系统出现不稳定。微分控制作用一个很大的缺陷是容易引入高频噪声,所有在干扰信号比较严重的流量控制系统中不宜引入微分控制作用。
PID框图
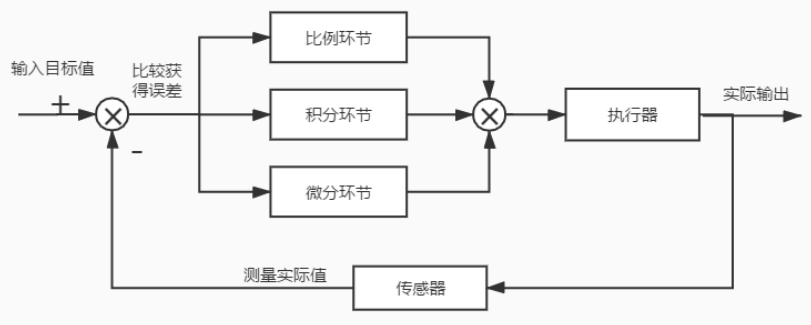
PID控制其实就是对偏差的控制过程;如果偏差为 0, 则比例环节不起作用,只有存在偏差时,比例环节才起作用;积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差;而微分信号则反应了偏差信号的变化规律,也可以说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的预知性。

PID结构体初始化 typedef struct { float target_val; //目标值 float actual_val; //实际值 float err; //定义偏差值 float err_last; //定义上一偏差值 float err_next; //定义下一偏差值 float Kp,Ki,Kd; //定义比例、积分、微分系数 float integral; //定义积分值 }pid; /*位置式PID*/ float PID_realize(float temp_val) { /*计算目标值与实际值的误差*/ pid.err=pid.target_val-temp_val; /*误差累积*/ pid.integral+=pid.err; /*PID算法实现*/ pid.actual_val=pid.Kd*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last); /*误差传递*/ pid.err_last=pid.err; /*返回当前实际值*/ return pid.actual_val; } /*增量式PID*/ float PID_realize(float temp_val) { /*传入目标值*/ pid.target_val=temp_val; /*计算目标值与实际值的误差*/ pid.err=pid.target_val-pid.actual_val; /*PID算法实现*/ float increment_val=pid.Kp*(pid.err-pid.err_next)+pid.Ki*pid.err+pid.Kd*(pid.err-2*pid.err_next+pid.err_last); /*累加*/ pid.actual_val+=increment_val; /*误差传递*/ pid.err_last=pid.err_next; pid.err_next=pid.err; /*返回当前实际值*/ return pid.actual_val; }
对比区别
• 增量式算法不需要对积分项累加,控制量增量只与近几次的误差有关,计算误差对控制量计算的影响较小。而位置式算法要对近几次的偏差的进行积分累加,容易产生较大的累加误差;
• 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作;而位置式的输出直接对应对象的输出,因此对系统影响较大;
• 增量式算法控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式算法适用于执行机构不带积分部件的对象,如电液伺服阀;
• 在进行 PID 控制时,位置式 PID 需要有积分限幅和输出限幅,而增量式 PID 只需输出限幅。
位置式 PID 优缺点:
优点:位置式 PID 是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k) 的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用;
缺点:每次输出均与过去的状态有关,计算时要对 e(k) 进行累加,运算工作量大。
增量式 PID 优缺点:
优点:1. 误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
2. 手动/自动切换时冲击小,便于实现无扰动切换。
3. 算式中不需要累加。控制增量 Δu(k) 的确定仅与最近 3 次的采样值有关。在速度闭环控制中有很好的实时性。
缺点:1. 积分截断效应大,有稳态误差;
2. 溢出的影响大。有的被控对象用增量式则不太好;
总结
比例:某时刻误差值
积分:所有时刻误差和
微分:某时刻误差变化率

 posted on
posted on

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律