
Python+OpenCV图像处理之图像二值化
在数字图像处理中,二值图像占有非常重要的地位,图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。
该函数的阈值操作属于像素级的操作,在灰度图中,每个像素都对应一个灰度值(0~255,0黑、255白),我们将阈值函数 threshold() 应用于图像,图像的灰度值与阈值进行比较,从而实现二值化处理,目的是滤除太大或太小值像素、消除噪声,从而从灰度图中获取二值图像(将图像的灰度值设置为0或255),实现增强整个图像呈现更为明显的黑白效果,同时也大大减少了数据量。
python实现
import cv2 import numpy as np # 全局阈值 def threshold_demo(image): gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # ret, binary = cv2.threshold(gray,0,255,cv2.THRESH_BINARY | cv2.THRESH_OTSU) # ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_TRIANGLE) # ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_TRUNC) ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) print("阈值:", ret) cv2.imshow("binary", binary) # 局部阈值 def local_threshold(image): gray = cv2.cvtColor(image,cv2.COLOR_BGRA2GRAY) # binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,25,10) binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 25, 10) cv2.imshow("binary ", binary) def custom_threshold(image): gray = cv2.cvtColor(image,cv2.COLOR_BGRA2GRAY) h, w = gray.shape[:2] m = np.reshape(gray, [1, w*h]) mean = m.sum()/(w*h) # binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,25,10) ret, binary = cv2.threshold(gray, mean, 255, cv2.THRESH_BINARY) cv2.imshow("binary ", binary) if __name__ == "__main__": img = cv2.imread("image/img1.jpg") cv2.namedWindow("input image", cv2.WINDOW_AUTOSIZE) cv2.imshow("input image", img) custom_threshold(img) cv2.waitKey(0) cv2.destroyAllWindows()
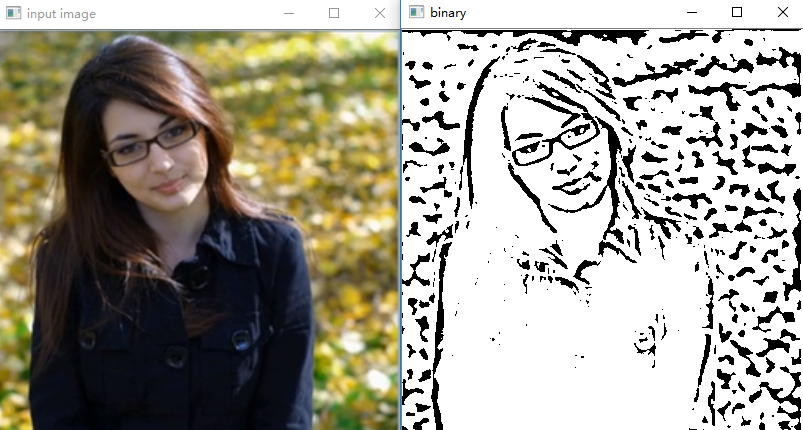
全局阈值函数运行结果

局部阈值函数运行结果
(一)全局阈值函数cv2.threshold(src, thresh, maxval, type[, dst]) -> retval, dst
参数: src - 输入数组/图像(多通道,8位或32位浮点)
thresh - 阈值
maxval - 最大值,与#THRESH_BINARY和#THRESH_BINARY_INV阈值类型一起使用的最大值(maximum value)
type - 阈值类型
dst - 输出数组/图像(与src相同大小和类型以及相同通道数的数组/图像)。
此外,特殊值#THRESH_OTSU或#THRESH_TRIANGLE可以与上述值之一组合。 在这些情况下,函数使用Otsu或Triangle算法确定最佳阈值,并使用它而不是指定的阈值。
返回值:retval - 阈值 thresh
dst - 经函数处理后的图像 image
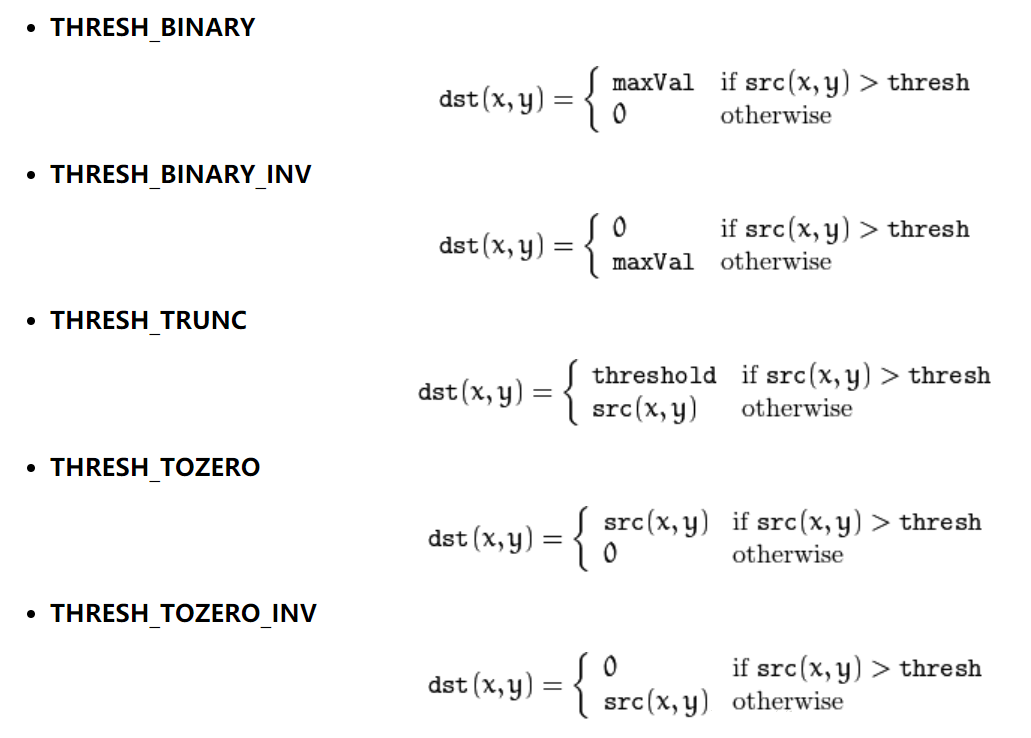
阈值类型
1)二进制阈值化 THRESH_BINARY
2) 反二进制阈值化THRESH_BINARY_INV
3)截断阈值化 THRESH_TRUNC
4) 阈值化为0 THRESH_TOZERO
5) 反阈值化为0 THRESH_TOZERO_INV
(二)局部阈值函数cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst]) -> dst
参数:src-输入图像(8位单通道图像)
maxValue-使用 THRESH_BINARY 和 THRESH_BINARY_INV 的最大值.
adaptiveMethod-自适应阈值算法,平均 (ADAPTIVE_THRESH_MEAN_C)或高斯(ADAPTIVE_THRESH_GAUSSIAN_C)
thresholdType-阈值类型,必须为THRESH_BINARY或THRESH_BINARY_INV的阈值类型
blockSize-块大小(奇数且大于1 )
C-常数,从平均值或加权平均值中减去的数。 通常情况下,这是正值,但也可能为零或负值
返回值:dst-经函数处理过的图像

 浙公网安备 33010602011771号
浙公网安备 33010602011771号