静态时序分析 - OCV
- 参考
1. OCV
-
OCV的全称是On Chip Variation,用于描述在一块芯片上不同管子间由于工艺偏差、电压降以及温度变化等引起的delay变化。
-
可以通过derate 特定单元/走线的延迟来对OCV的影响进行建模。
- 使用指令如下,对延迟进行derate处理。下面的指令是指定所有的网络延迟和单元延迟,也可以使用tcl脚本单独指定cell delay 或 net delay。
# 降低延迟20% set_timing_derate -early 0.8 # 增加延迟10% set_timing_derate -late 1.1
- 使用指令如下,对延迟进行derate处理。下面的指令是指定所有的网络延迟和单元延迟,也可以使用tcl脚本单独指定cell delay 或 net delay。
-
拒绝过于悲观
-
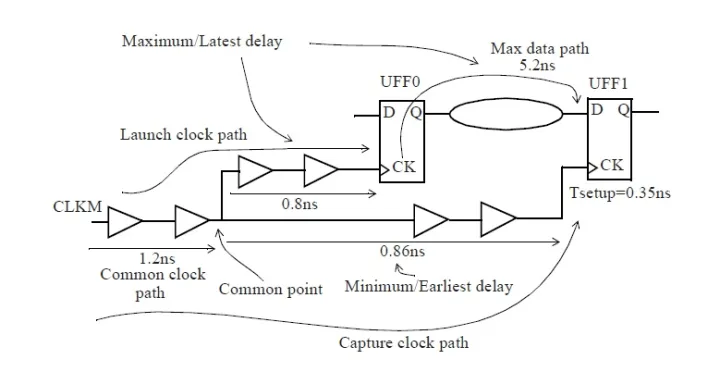
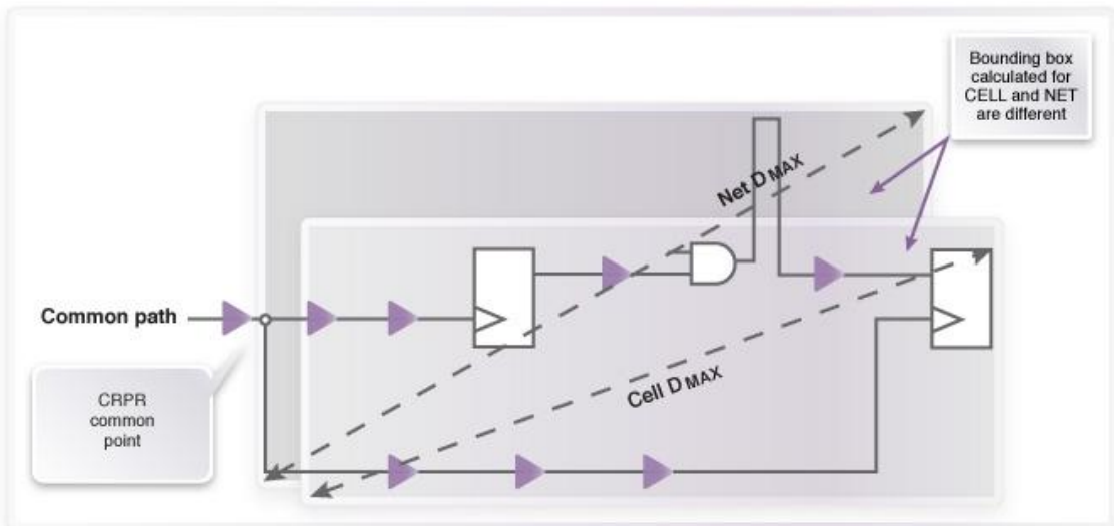
注意对于上图这种 Launch clock 和 Capture clock 存在一段公共的时钟路径,这部分不应该对其进行derate处理,因为这部分物理实现上为处在同一个PVT条件下。Synopsys 称为CRPR = Clock Reconvergence Pessimism Removal。
- CRPR 是基于时序弧分析的,而不是gate分析的。
- 如下图所示,Innovus的分析行为是:如果Launch clock 和 Capture clock在时钟源的边沿相同,且到达common point时边沿时亦相同,那么CRPR的值就是从时钟源到common point的延时。如果不满足前面两个情况,那么CRPR的值就为两个时序弧延时的最小值。
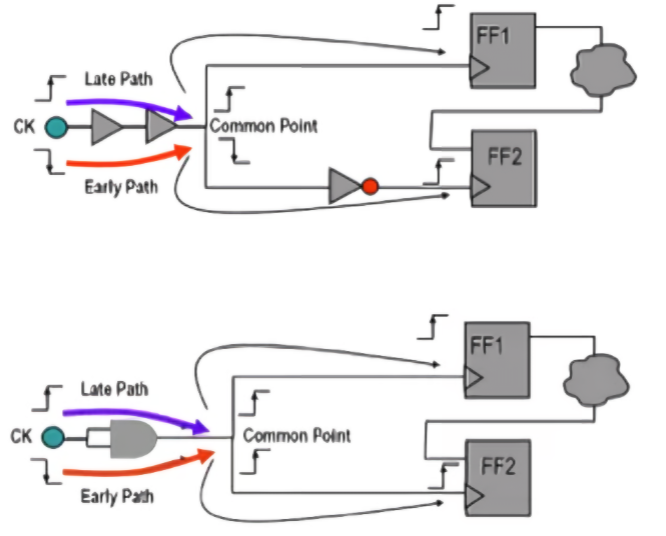
- CRPR 是基于时序弧分析的,而不是gate分析的。
-
考虑time derate需要在某个单一条件下,比如说BC或者WC条件下,但是不要把多个Corner(例如:BC和WC)混在一起,再OCV,那样太过于悲观。
-
-
OCV 的分析与计算
- 以上面的电路为例,不考虑OCV影响,计算最小周期T需要满足\[1.2+0.8+5.2+0.35 <= T+1.2+0.86 \]
- 考虑OCV影响,使用tcl指令针对setup检查和hold检查分别加以约束。
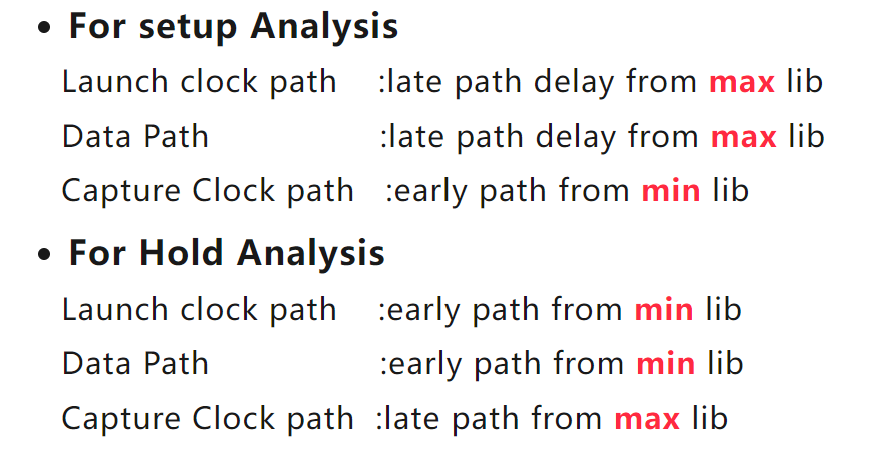
- setup检查
- 对于Launch clock path 和 data path 使用 -late 选项;对Capture clock path 使用 -early 选项。
- 但是考虑到setup check 一般在WC PVT下,因此不需要在Launch clock path 和 data path上加time derate了,因为在WC下,其delay已经是所有corner中最大的了;但是在WC下,Capture clock path上的delay一定不是最小的,所以可以加derate指令。
set_timing_derate -early 0.9 set_timing_derate -late 1.0 - 此时最小周期T计算满足(进行共同路径悲观去除,CPPR)\[0.8 + 5.2 + 0.35 <= 0.86*0.9 + T \]
- hold检查
- 对于Launch clock path 和 data path 使用 -early 选项;对Capture clock path 使用 -late 选项。
- 但是考虑到hold check 一般在BC PVT下,因此不需要在Launch clock path 和 data path上加time derate了,因为在BC下,其delay已经是所有corner中最小的了;但是在BC下,Capture clock path上的delay一定不是最大的,所以可以加derate指令。
set_timing_derate -early 1.0 set_timing_derate -late 1.2
- setup检查
- 以上面的电路为例,不考虑OCV影响,计算最小周期T需要满足
-
OCV & BC-WC
-
静态时序分析工具给出了3种分析模式
- Single mode
- BC-WC
- OCV mode(AOCV,POCV)
-
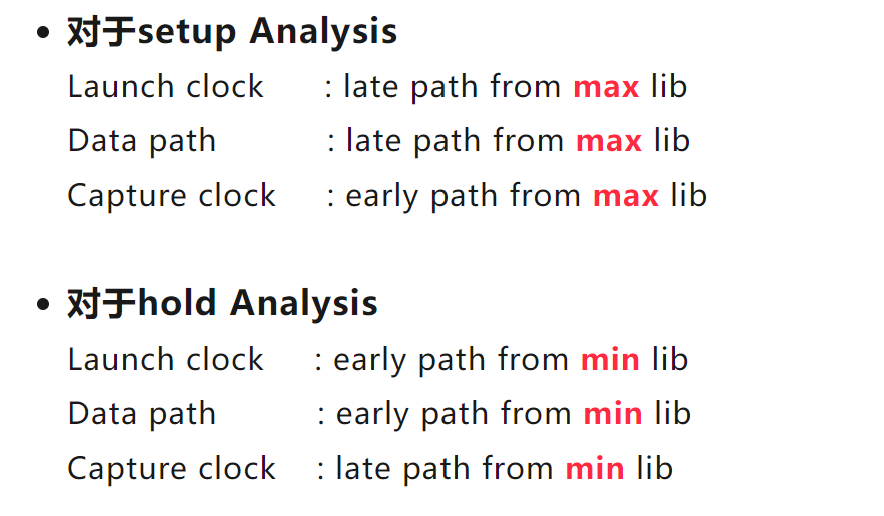
OCV的原始定义如下,可以看到与BC-WC混合模式十分相似。只是在计算setup和hold中都混用了max库和min库。
- 但是前面也有介绍,为了不要太悲观,我们一般不会采用这种BC,WC混用。
-
BC-WC模式如下。
-
2. AOCV
-
为什么需要AOCV
- 在40nm之前,简单的OCV derate模型基本可以覆盖大部分情况,且不会悲观到不能接收。
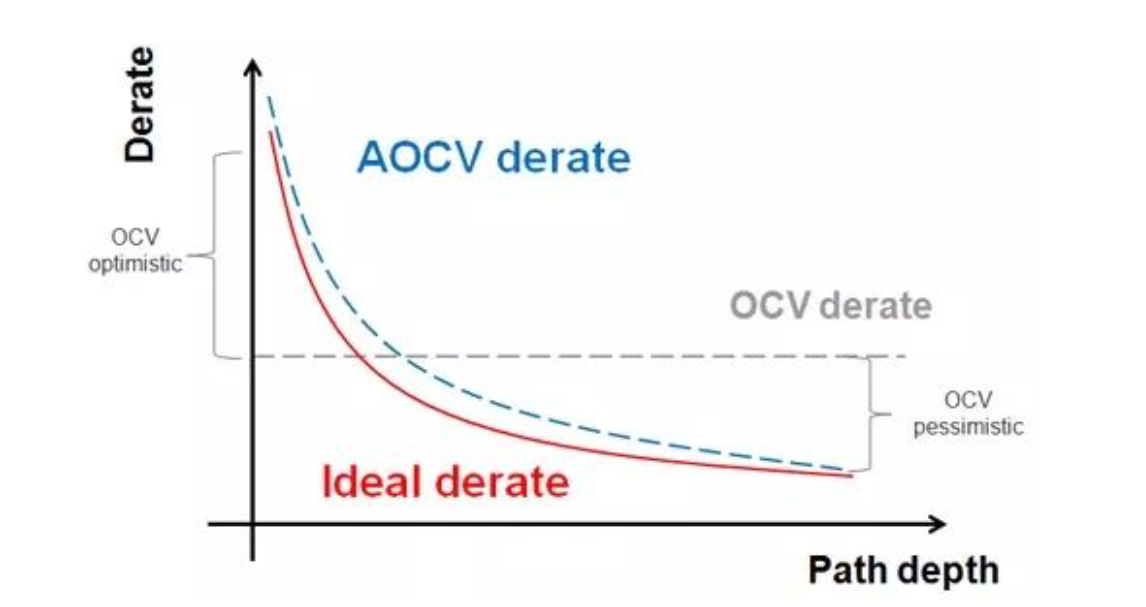
- 如下图所示,OCV模式设置的derate值与path depth无关,导致其既不能cover最悲观的部分,但又对另一部分过于悲观。在40nm之后,随着设计的频率不断提升,OCV所引入的不准确性已经无法承受。
-
Distance based AOCV
- 距离越远的cell之间的variation越大,所以AOCV的分析策略可以是Distance Based,距离越大,derate越大。
- 这个距离是指timing path所在物理范围矩形对角线的长度。timing path的位置信息可以由SPEF提供,要求抽SPEF时需要将坐标信息也抽出,而在STA读SPEF时,将坐标信息读入。
-
Depth based AOCV
- 考虑到不可能一条path上的所有cell的variation都是悲观的,会存在一些cell的variation是相互抵消的,所以在Depth based AOCV模型中,depth越大,derate值越小。

-
AOCV Table
- 有一维和二维两种。
- 一维:坐标为 depth。
- 二维:坐标为 distance 和 depth。虽然较一维更为准确,但是runtime也更大。
- 有一维和二维两种。
3. POCV
-
为什么需要POCV
- AOCV 如果是基于GBA进行分析,那么精度不够,过于悲观;如果基于PBA进行分析,runtime又无法接受。
- GBA和PBA的相关解释可见这篇博客。
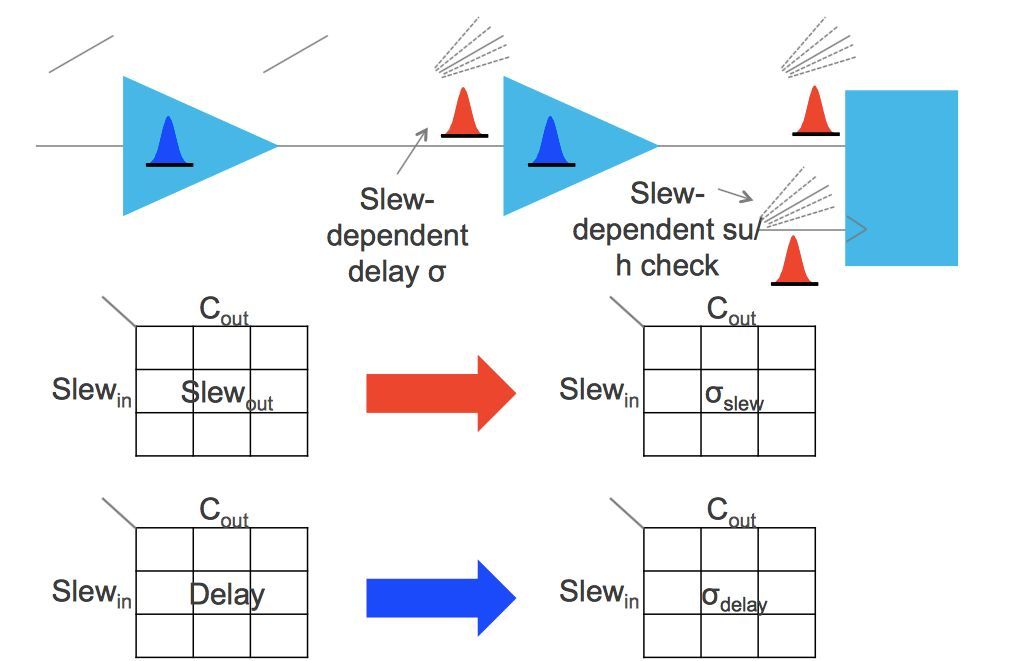
- AOCV没有考虑input transition和output load对variation的影响,以及variation对input transition的影响。
- 使用一种新的计算模型:Synopsys 叫 POCV(Parametric OCV),Cadence 叫 SOCV(Statistical OCV)。
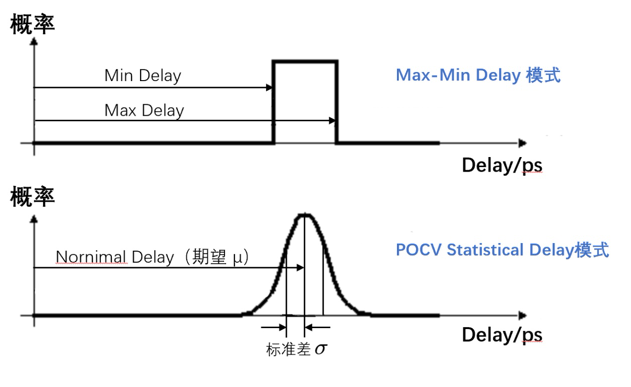
- POCV 将delay模拟成一个正态分布进行计算。如下图可知,POCV(SOCV)计算的值更精准。
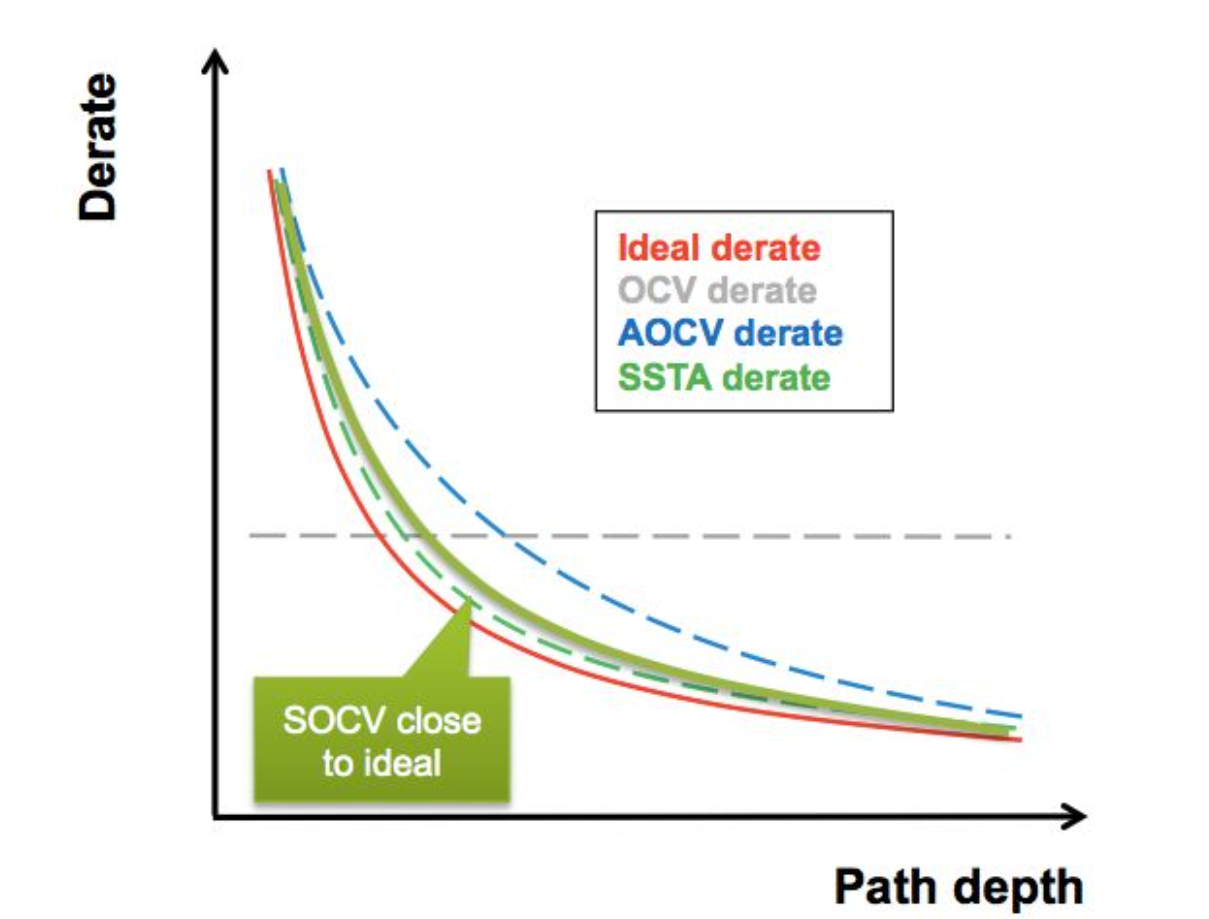
- AOCV 如果是基于GBA进行分析,那么精度不够,过于悲观;如果基于PBA进行分析,runtime又无法接受。
-
POCV derate计算
-
对每个cell分别建模,cell 的 derate 是一个基于μ和σ的高斯随机变量函数,如下所示。
-
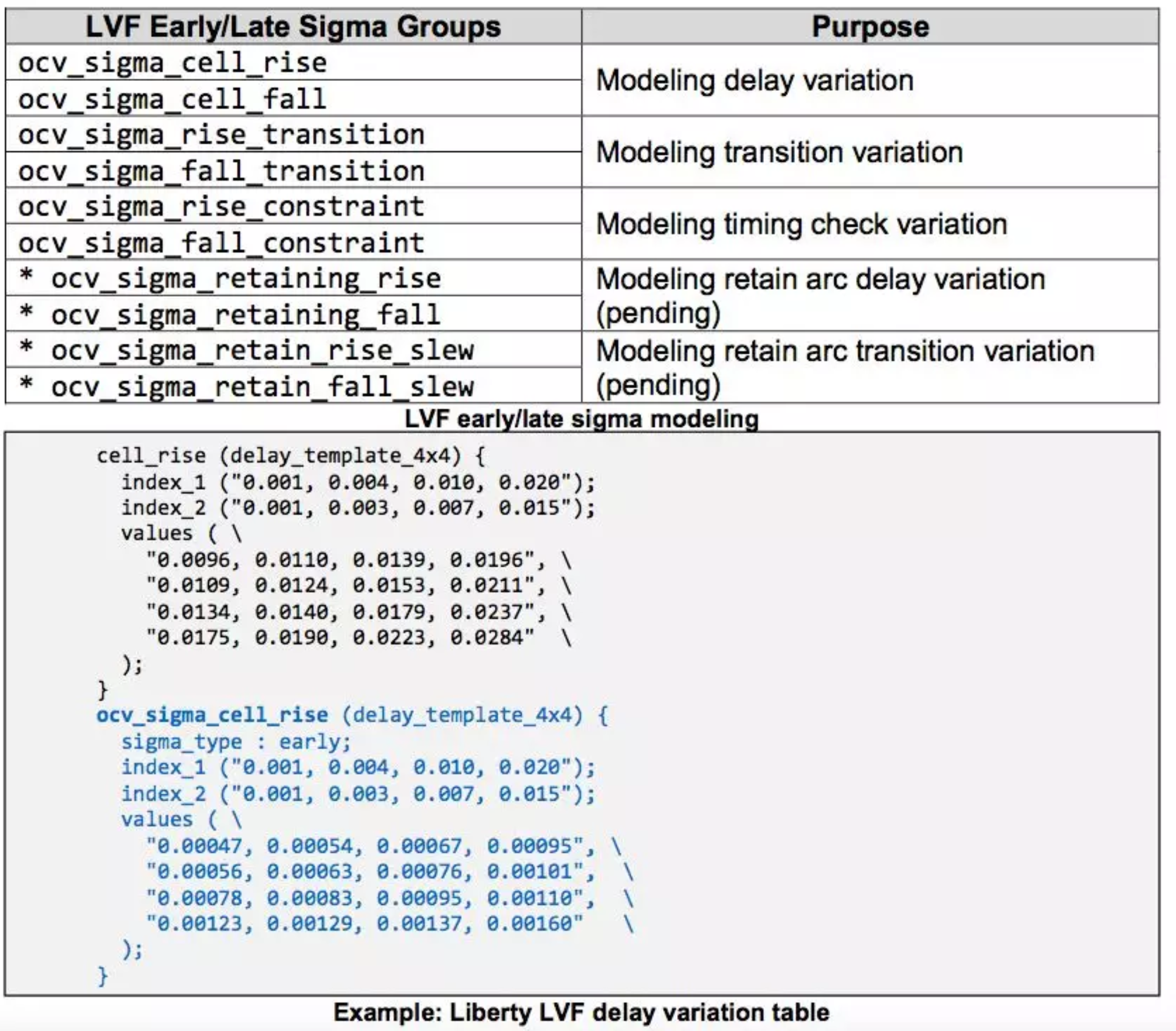
根据读入的LVF文件(LVF一般由foundry提供),可以根据input transition 和 output load 查找到平均延时和Sigma值。根据下表完成计算。其中n一般为3.
setup check hold check Capture clock path M-n*S M+n*S Launch clock path M+n*S M-n*S -
以计算delay variation为例,cell rise中的值为M,而ocv_sigma_cell_rise中的值为S。
-
-
LVF (Liberty Variation Format)
-
传统的LVF文件中有输出为cell delay、output transition 以及timing check的LUT,LUT的index与NLDM/CCS一样都为 input transition 和 output load。
-
从文件中可以根据高斯分布delay的计算公式以及分析场景分别计算出正确的delay和transition。
- 这里可以看到LVF 查找表中考虑到了variation对transition的影响,并将该transition的值一级一级通过查找表传递。
-
考虑进入16nm,先进工艺结点和超低电压都会导致cell的delay为一个强非高斯分布,会出现均值偏移(mean-shift)以及偏斜效应(skewness effects)。
- 为了解决,引入3个moment-based模型。详细解释见这篇文章。
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号