ICC - CTS
- 参考
- 在做CTS之前,更重要的是要做好FloorPlan和Placement;或者说在前面应该思考时钟树如何综合。
- 时钟树上插入的clock buffer和普通buffer有何区别?
- clkbuf 的上升延迟时间和下降延迟时间较平衡,需要保证时钟上升和下降尽量对称,以此保证得到较为准确的占空比。
1. CTS的目标
- clock skew 尽量小。
- clock latency 尽量小。
- common path 尽量长。(目的是改善ocv效应)
2. CTS在做什么
- 读取clock的定义,以及在何种scenario下进行时钟树综合。
read_sdc create_scenario - 工具首先会对clock line上的cell/net进行DRV优化。
- DRV:Design Rule Violation,包括max_transition, max_capacitance, max_fanout, max_net_length等。
compile_clock_tree - 对每个clock的latency和skew进行优化。尽量缩短每个clock的latency,并减小sink之间的skew。
optimize_clock_tree - balance已经定义的clock group,会尽量将不同clock的latency做的尽量接近。
balance_inter_clock_delay - Route Clock。
route_zrt_clock_tree
3. 可控的CTS
- CTS更多可控可看这篇文章以及ICC的Tool commands文档。下面仅列出部分内容。
- Target Skew:告诉工具,我们希望CTS之后能够得到的最大skew值。
set_clock_tree_options -target_skew 100 -clock CLK; - Target Insertion delay:指定工具最小的插入延迟(insertion delay).不指定默认为0.
set_clock_tree_options -target_early_delay 100 -clock CLK; - Max Transition:一般选择时钟周期的10%-20%。
set_max_transition 200 -clock_path [get_clocks CLK]; - CTS exceptions:
- 下面介绍的四个pins的设置都是该指令的配置选项。
set_clock_tree_exceptions -stop_pins/exclude_pins... { list of pins }- Stop pins(Sink pins)
- 让CTS在某处停止,时钟信号不再继续传播;告诉工具将某些pin/port标记为sink。
- 工具只对stop_pins的delay进行balance,如果其它pin也需要进行优化,需要对pin进行sdc约束,告诉工具。
- Exclude pins(Ignore pins)
- 工具通过插入guide buffer来从时钟树中隔离这些引脚。
- CTS不会对到达这些端点的时钟树进行时序计算和优化;只会进行设计规则修正。
- 常见的exclude pin就是所有的非时钟引脚,以及定义不正确的时钟引脚等,CTS阶段不需要管这些端口。
- ICC会自己推断要排除的引脚,也可以自己使用脚本再额外设置。
- Nonstop pins
- 工具会穿过Nonstop pins,继续查找真正的sink点。
- 驱动生成时钟的时序单元的时钟引脚一般是Nonstop pins。例如分频器等。
- ICC认为时钟门控单元的时钟输入引脚是Nonstop pins,因此不需要手动重复设置。
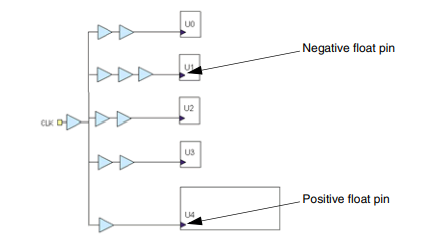
- Float pins
- 与Stop pins相类似,但是在构建时钟树时会考虑该引脚内部的时钟延迟。
- 工具在计算到Float pins的Insertion delay时,会将Float pin内部的延迟(正/负)添加到Insertion delay中。
- 常见使用在Hard Macro的时钟输入引脚。
- 考虑到Hard Macro的内部延迟信息会在lib文件的时序模型中表示,ICC会根据模型确定macro内部的延时。
- 根据外部计算的insertion delay判断这个是positive/negative pin。相当于在原有insertion_delay ± macro_delay.
- 与Stop pins相类似,但是在构建时钟树时会考虑该引脚内部的时钟延迟。
- 除了上面介绍的4个pin的约束,exception的约束还包括dont_touch/buffer/size系列。这里简要介绍一下dont_touch。
- 当设计中存在已经设计好的时钟树,可以使用指令set_clock_tree_exceptions -dont_touch_subtrees $name设置为dont touch属性,CTS会将其它待综合的时钟树和pre-exiting的时钟树进行balance。
4. CTS步骤
- CTS整体流程如下图所示,这里只介绍部分知识用作学习。

4.1 分析clock结构,制定CTS策略
- 策略主要需要尽可能的满足上面三个目标,如何让工具按照指定的策略进行时钟数综合呢?
- 可以通过preplace clk的MUX选择器或分频逻辑模块(我理解为generate clock模块)在想要布时钟线的路径上。
- 因此指定CTS策略这步需要确定preplace的逻辑以及放置的区域。
4.2 CTS开始前的检查和设置
- (1)report_clock、report_clock_tree查看时钟和时钟树信息;以及report_constraints:查看设计是否有violation.
- 此时可以有hold violation。
- (2)设置目标skew和insertion delay。设置DRC规则:max_fanout , max_transition , max_capacitance;下面有关于clock root相关DRC设置要求。
- (3)设置时钟树的references
- 指定clock buffer/inverter list
- 其中inverter对工艺要求较高,必须采用LVT或SVT,而且只允许有一种VT。更多内容可以看这篇文章。
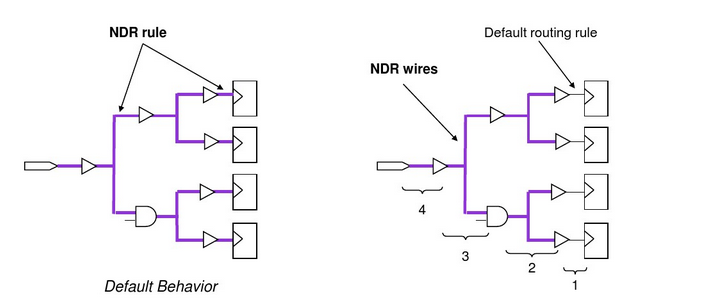
- (4)时钟树布线规则的定义(NDR)
- 为了减少其它信号串扰和EM(电子迁移)的影响,一般会采用双倍线宽和双倍间距;并一般采用高层金属作为时钟信号的走线。
- 标准单元的pin脚一般为M1/M2金属层,如果设置为NDR,会导致很多DRC问题,所以在sink端还是使用默认线宽和间距布线。
- (5)设置时钟树延迟计算模式:精确程度:arnoldi > awe > elmore。
set_delay_calculation_options -routed_clock arnoldi
4.3 Clock root 定义
- clock root如果是input port,那么分为是否有I/O Pad。
- 如果没有I/O Pad,那么需要准确的指定输入端口的驱动单元。
- 对于一个弱的驱动来说,CTS需要插入额外的buffer来保证DRC通过。
- 如果不设置,那么工具会假设输入端口的驱动能力无穷大,内部不需要做额外的buffer处理。
- 如果有I/O Pad,那么需要准确的指定input_transition的大小
- 如果没有I/O Pad,那么需要准确的指定输入端口的驱动单元。
- 定义时钟root点
- 使用create_clock定义时钟的root点。
create_clock -period 10 -name clk1 [get_ports FCLK1] - 如果是generate clock,可以使用create_generate_clock定义。
- 要求master clock要定义清楚,并且generate clock和master clock要可以trace通。
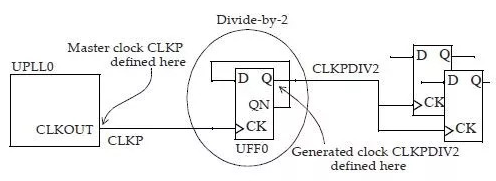
- 根据上图可以写出tcl:
create_generated_clock -name CLKPDIV2 -source UPLL0/CLKOUT -add -master_clock CLKP -divide_by 2 [get_pins UFF0/Q] - generate clock和master clock之间的相位关系必须指定清楚,最简单的方式是直接指定相位边沿关系。
create_generated_clock -name CLKdiv2 -edges {2 4 6} -source CLK [get_pins Udiv/Q]
- 要求master clock要定义清楚,并且generate clock和master clock要可以trace通。
- 使用create_clock定义时钟的root点。
4.4 找时序路径的端点
- clock sinks可以是stop pins,exclude pins以及float pins。根据第3节的介绍来判断CTS如何计算/优化。
- 第3节介绍的时钟端点是在同一时钟下各个路径之间的balance,我们也需要关心多个create_clock定义的时钟root端。
-
虽不是同一时钟,但有reg进行talk。默认情况,CTS会分别build各自的clock tree,不会做inter-clock balance。如下所示。
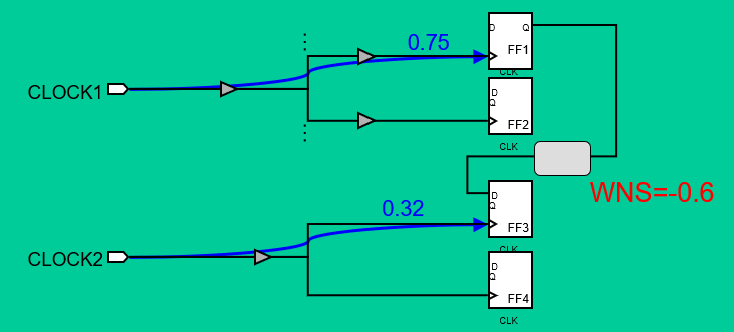
-
上图由于两个时钟skew的值相差太大,导致很严重的建立时间违例。可以通过tcl设置进行inter-clock 的balance。
set_inter_clock_delay_options -balance_group "Clk1 Clk2" -balance_group_name group2 balance_inter_clock_delay -clock_trees { clock_1 clock_2 }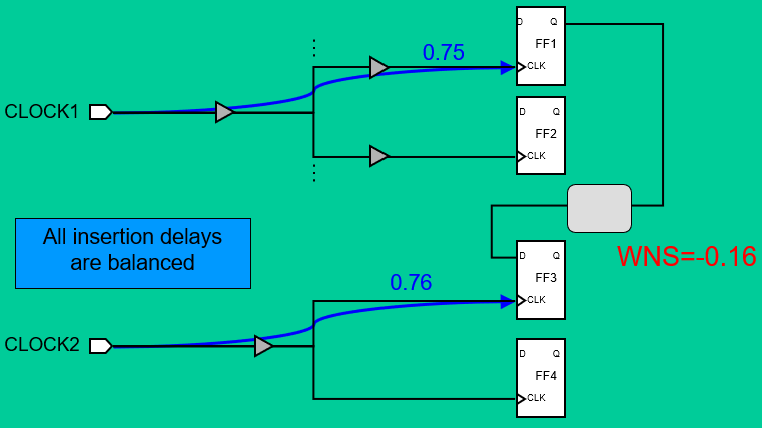
-
4.5 Build Clock Tree
- 主要有两种方法
- clock_opt
- compile_clock_tree + optimize_clock_tree
- 相关指令选项可以看Tool Commands手册。
- 完成之后可以report_timing/report_clock_tree/report_constraint
4.6 Post-CTS
- 前面完成的是Pre-CTS,下面将完成Post-CTS。
- ideal clock & propagated clock
- 在Pre-CTS阶段之前,我们使用的是ideal clock,从clock source到寄存器的时钟端口的network latency的值为我们使用set_clock_latency约束的。
- 在Pre-CTS之后,工具可以自动update IO latency 去反应实际时钟到达时间,并在原有的时钟树上插入计算的IO latency。具体内容可以在2016版ICC User Guide 5-104页找到。
update_clock_latency # 或在clock_opt加上 -update_clock_latency 选项 - 在Post-CTS阶段之后,我们使用的是propagated clock,此时使用的network latency是实际的时钟互连线网络的RC 提取参数计算出的延时。
- Post-CTS 时钟属性处理
- 移除所有时钟的理想属性
remove_ideal_network [ all_fanout -flat -clock_tree ] remove_clock_latency $clk # 设置时钟为propagate属性 set_propagate_clock [ get_attr $clock source ] - 重新定义clock uncertainty
- Pre-CTS
- setup: uncertainty = PLL jitter + 预估的clock skew。
- hold:uncertainty = 预估的clock skew + hold margin。
- hold是同一个时钟边沿检测,可以去掉clk jitter的影响。setup是两个clk边沿计算,需要加上jitter的影响。
- Post-CTS
- 在Post-CTS阶段,时钟树的propagate delay已经确定,skew是真实存在的,不用再计算在uncertainty中。
- setup:uncertainty = PLL jitter。
- hold:0 + hold_margin。
- hold margin:考虑到OCV的影响,不同的Flipflop之间的hold time可能是不同的,需要加hold margin来保证。Foundry提供的Signoff表格会给出要求的hold margin。
- Pre-CTS
- 在做完上面的处理之后,使用指令update_clock_latency再更新一下latency信息。
- 移除所有时钟的理想属性
- 修hold violation
- 首先搬出一篇文章,讲的很清楚为什么在Post-CTS阶段才去管hold violation。
- 总结来说,hold和skew的关系最为密切,只有在Post-CTS阶段,skew值是真实计算的值,这个时候去修hold才是有意义的。
- 并不是说hold优先级没有setup高,反而hold才是最危险的,投片后如果出现hold violation无法通过降频去改善。
- 可以通过指令 set_fix_hold去修hold violation。
- 此时没有真实的布线,但是可以通过虚拟布线提取参数进行hold/setup的计算,此步就可以去修setup/hold的violation。
- Route是在解DRC的过程,而在Post Route时,需要考虑SI,setup/hold等问题。
- 首先搬出一篇文章,讲的很清楚为什么在Post-CTS阶段才去管hold violation。
- 面积优化
- psynopt -area_recovery
- set_max_area 0
- set physopt_area_critical_range 0.2, 该指令是指在timing slack大于某个值的path上用时序换面积。
- extract_rc 提取寄生参数
- 时钟绕线
route_zrt_group -all_clock_nets -reuse_existing_global_route true

 浙公网安备 33010602011771号
浙公网安备 33010602011771号