【一】工程配置与电机控制part1
前言
关于电机的选择。
学校发的无刷电机:

我们准备的有刷电机:

带霍尔编码器!
电机参数:
名称:驰名电机(直流减速电机)型号:JGA25-370
电压:12V
转数:1360r/min
既然做云台,那么核心是PID控制。PID以后再讲。本期先讲电机的部分内容。
无刷or有刷?
无刷电机需要foc控制与SVPWM调制,算法较为繁琐。捣鼓期间也遇到不少bug,故舍弃无刷电机,选择有刷电机。为啥?代码简单呗!
(补充:若无刷电机用PWM而不是SVPWM,则会很烫很烫,烧起来也说不定~)
一、硬件准备
- stm32F401/411开发版(SAST)
- J-LINK/ST-LINK下载器
- 直流有刷电机JGA25-370(带编码器)
- 电机驱动板L298N/TB6612
- 12V锂电池
二、工程配置
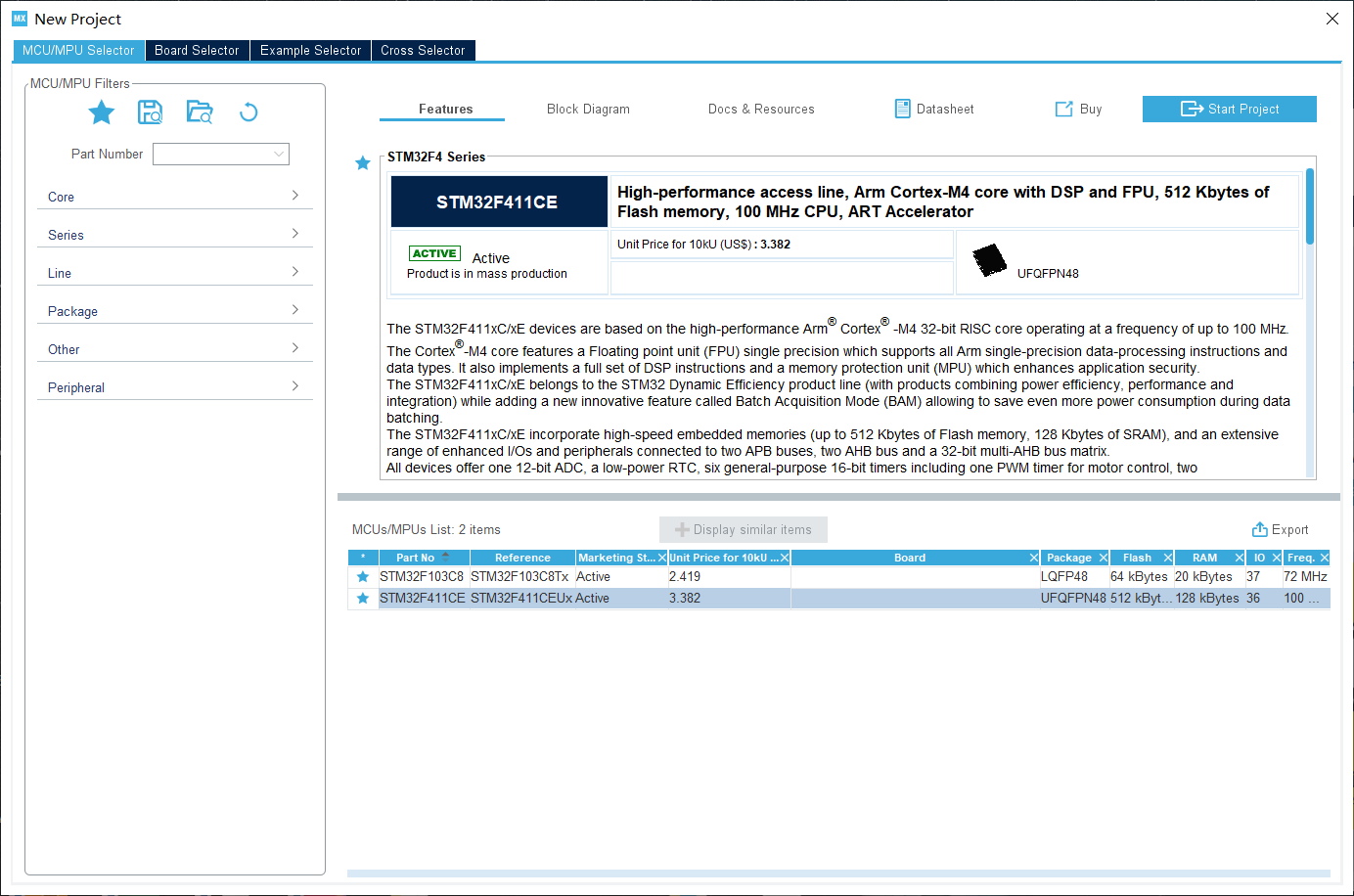
新建stm32工程,这里采用的是cubmx+keil5方式。(不会还用人用标准库吧:-))
我用的是F411。
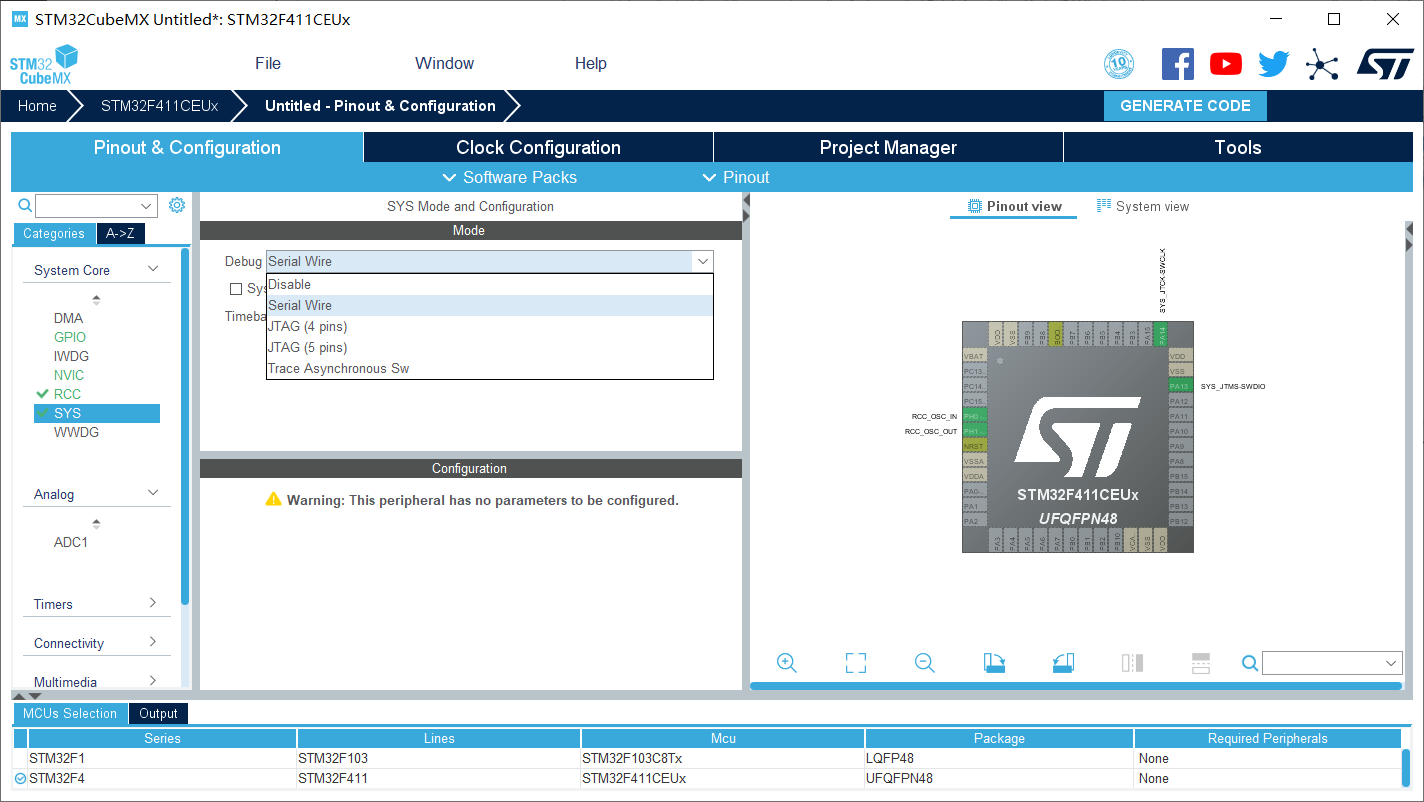
1、尝龟配置
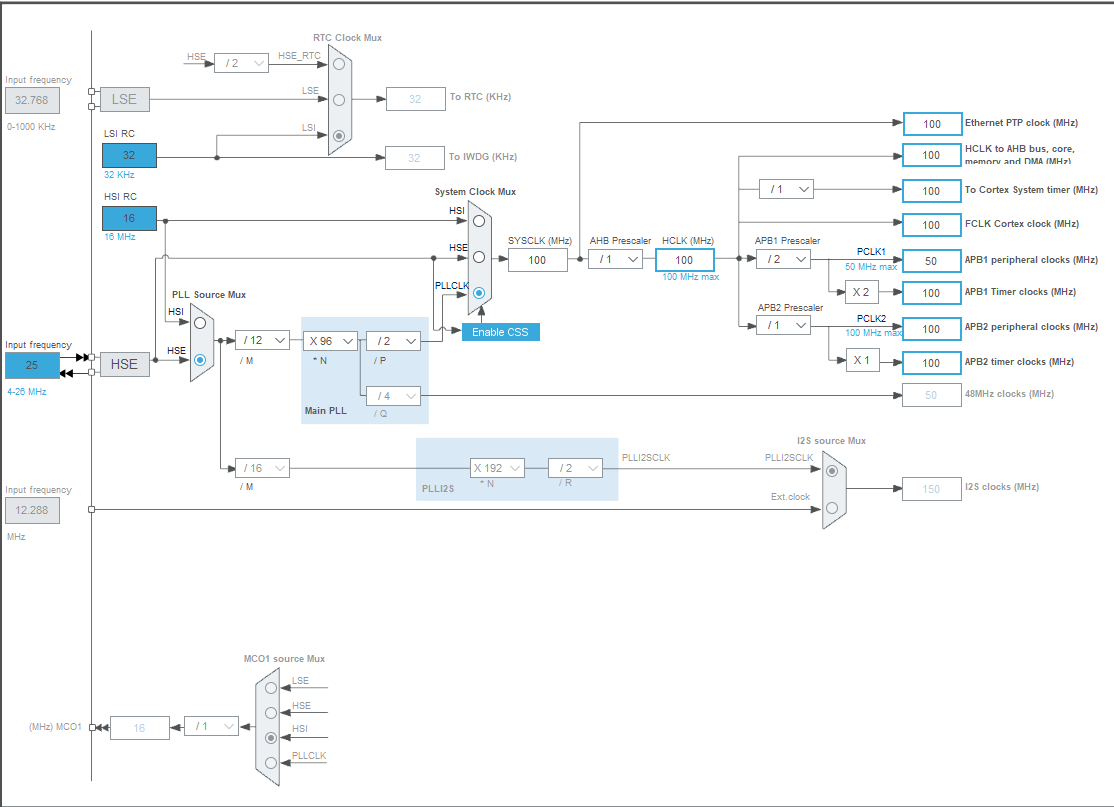
使用外部高速晶振、Debug选Serial Wire。(我用的是J-LINK下载器)时钟树开HCLK为100MHz。(F411最大HCLK)

2、设置PWM输出
TIM5设置为内部时钟—CH3—PWM Generation。命名为PWM。
一般而言,给电机的PWM波大约2kHz。
配置HCLK=100MHz(F411最大HCLK),PSC=50-1,ARR=1000-1。
由频率计算公式可得:
其余默认配置即可。
(注:因为是PWM输出,所以没必要使能NVIC中断)

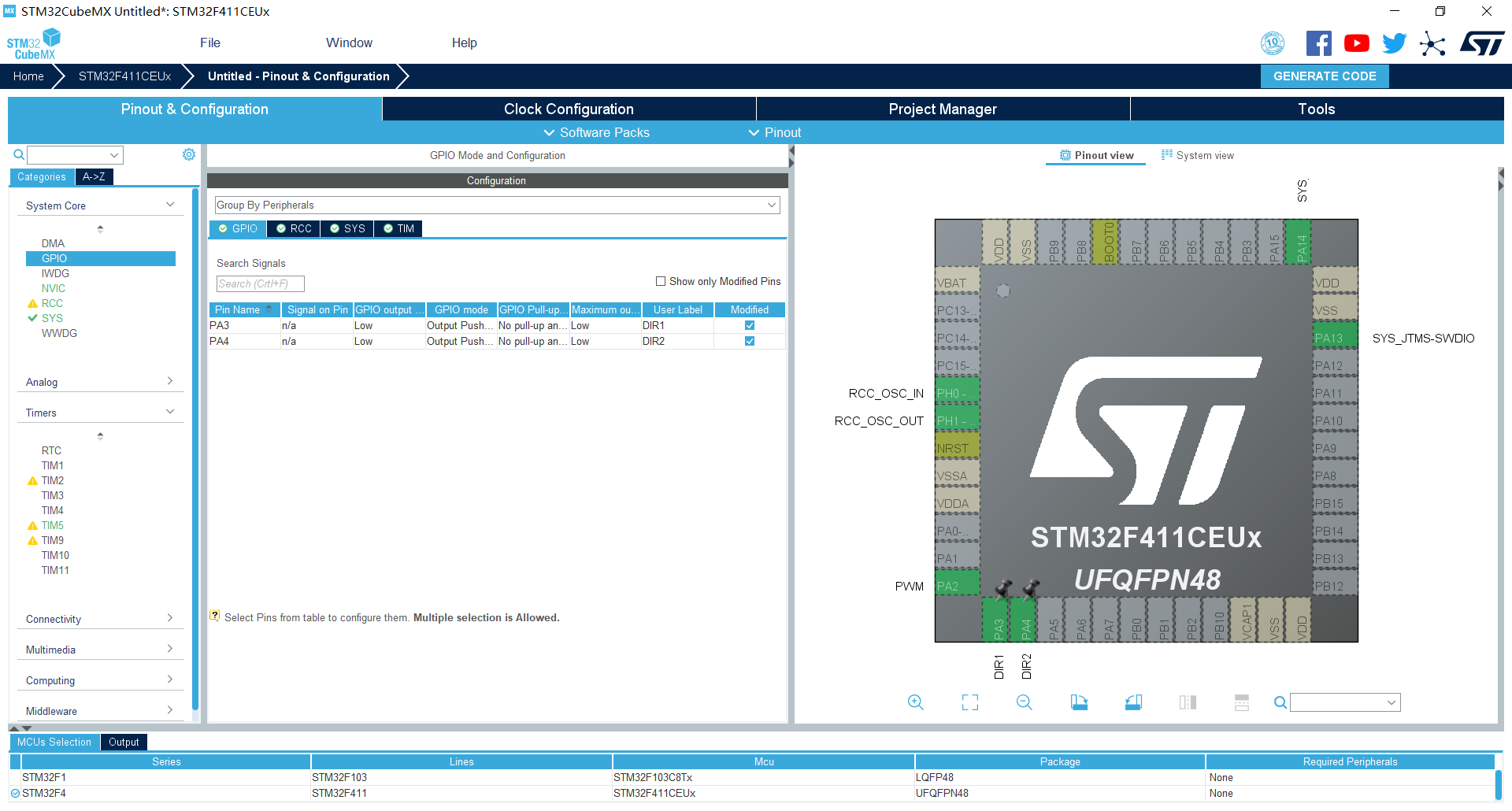
3、设置两个IO口输出
用于控制电机转动方向,命名为DIR1和DIR2。
设置PA3—Output与PA4—Output。其余默认配置即可。
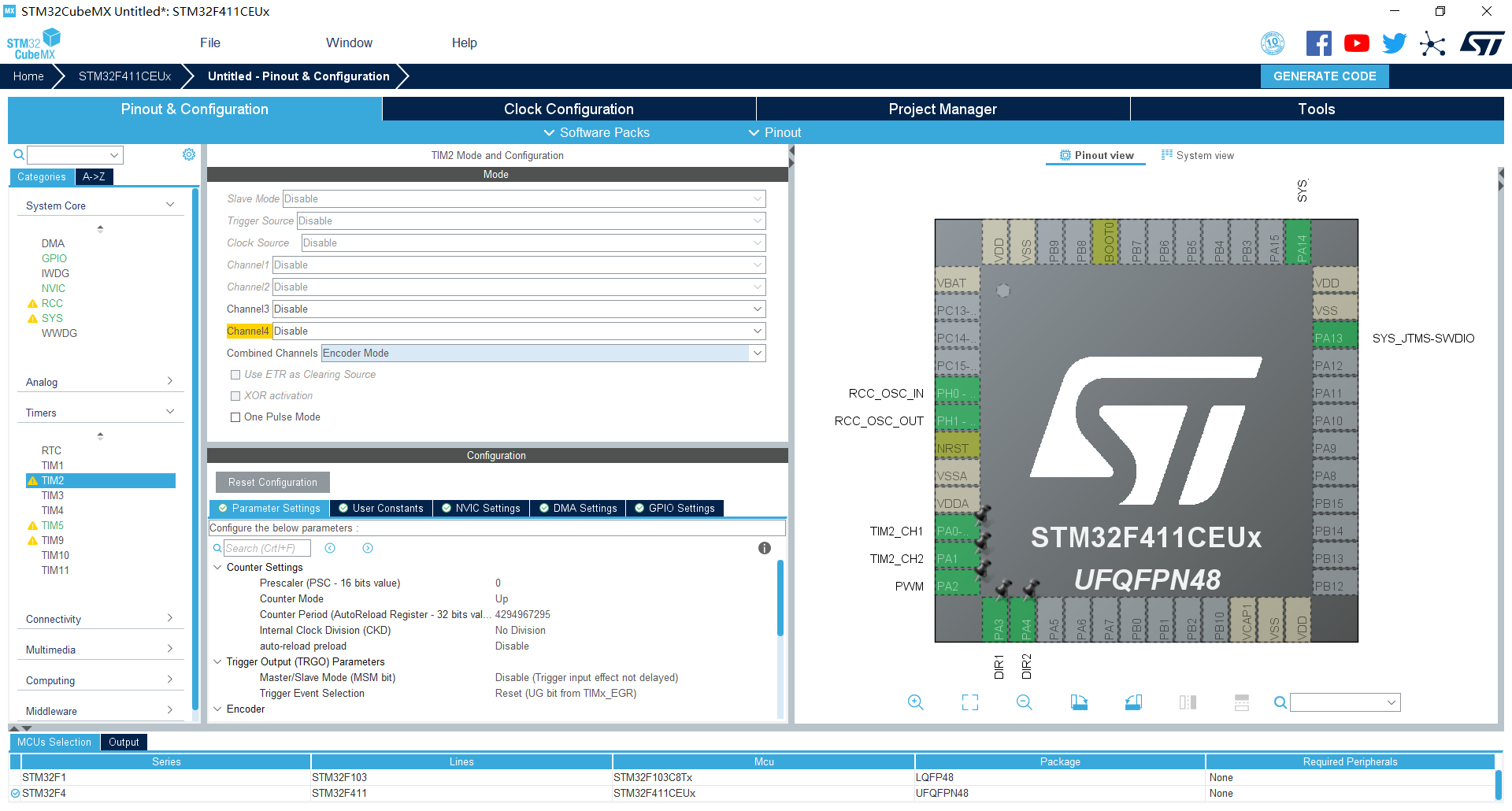
4、设置编码器模式
关于编码器模式,很多人可能不李姐。详细的会在以后的文章里写。这里先粗略写一下。
电机工作时,通过霍尔编码器输出AB相脉冲,单片机读取脉冲数以得到转速与角度等信息,我们还要对采集到的数据进行处理。而stm32定时器正好有个编码器模式,我们只需读取定时器计数值就能知道脉冲数为多少。
TIM2—Combined Channels—Encoder Mode
下面的都不用设置。
把图中的三个(TIM2_CH1和TIM2_CH2和PWM)Signal Pinning一下。
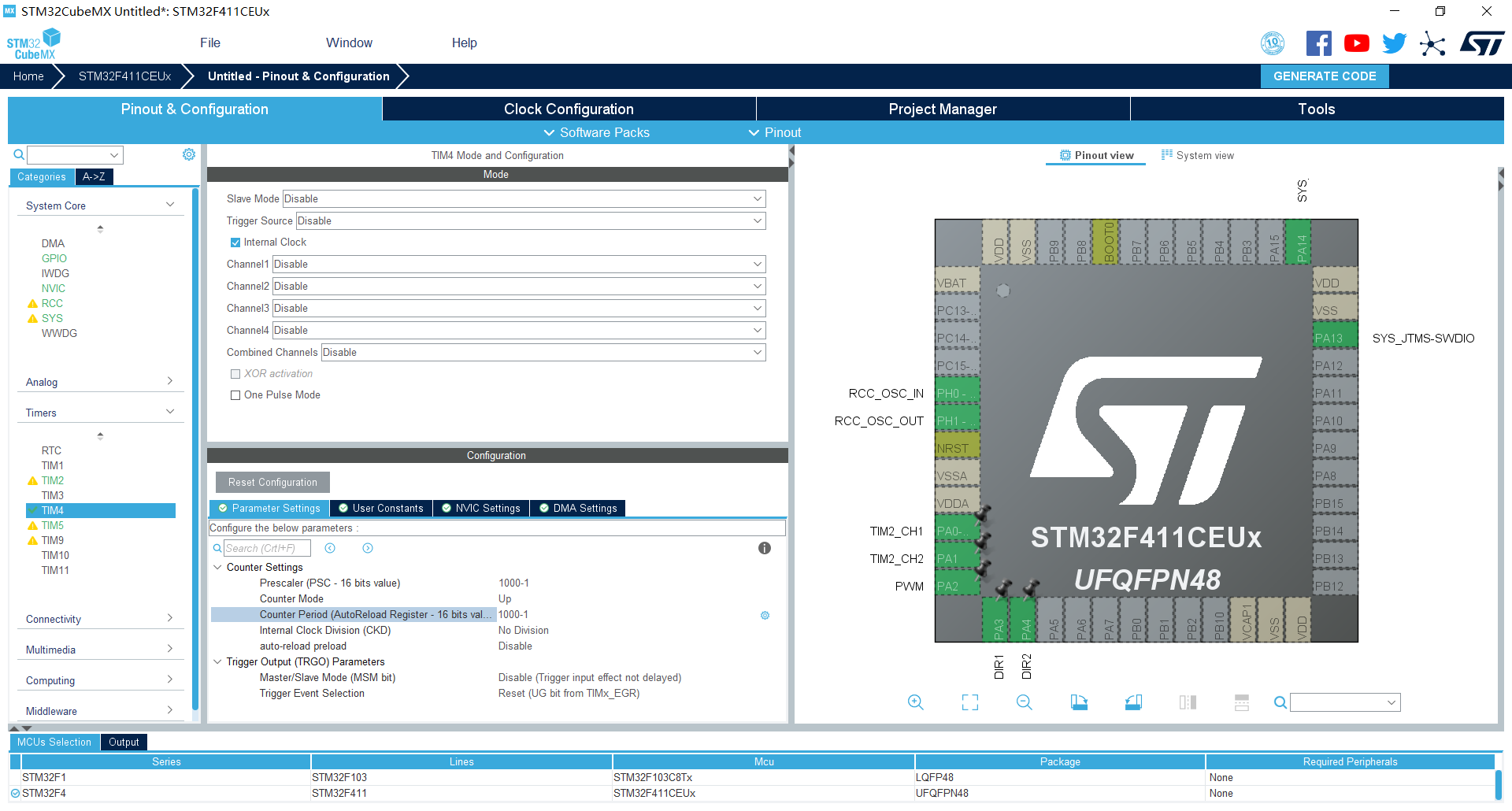
5、设置中断
打开一个定时器更新中断,在这个中断里我们处理编码器的数据以得到转速、角度等信息,并进行PID控制。
TIM4设置为内部时钟即可。
配置HCLK=100MHz(F411最大HCLK),PSC=1000-1,ARR=1000-1。
中断一般为100Hz。
别忘了在NVIC Settings使能中断。
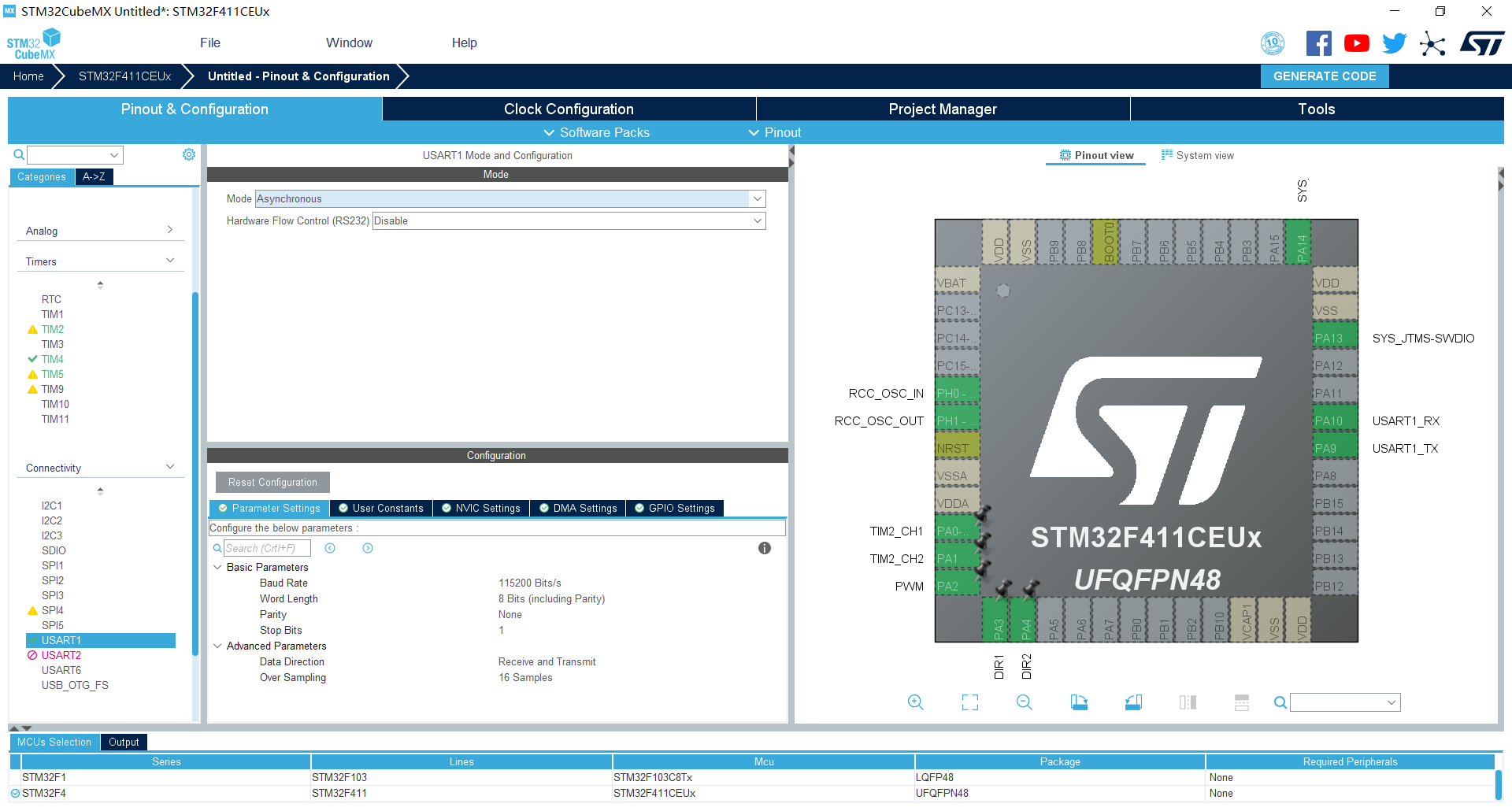
6、打开一个串口
用于调试。
尝龟设置,设置设置MODE为异步通信(Asynchronous)。其余的默认即可。(波特率为115200)
别忘了在keil里写串口重定向。
7、生成keil工程
尝龟配置。
设置工程名称、路径(不要有中午路径),
配置IDE为MDK-ARM。代码生成配置勾选图中红框处。

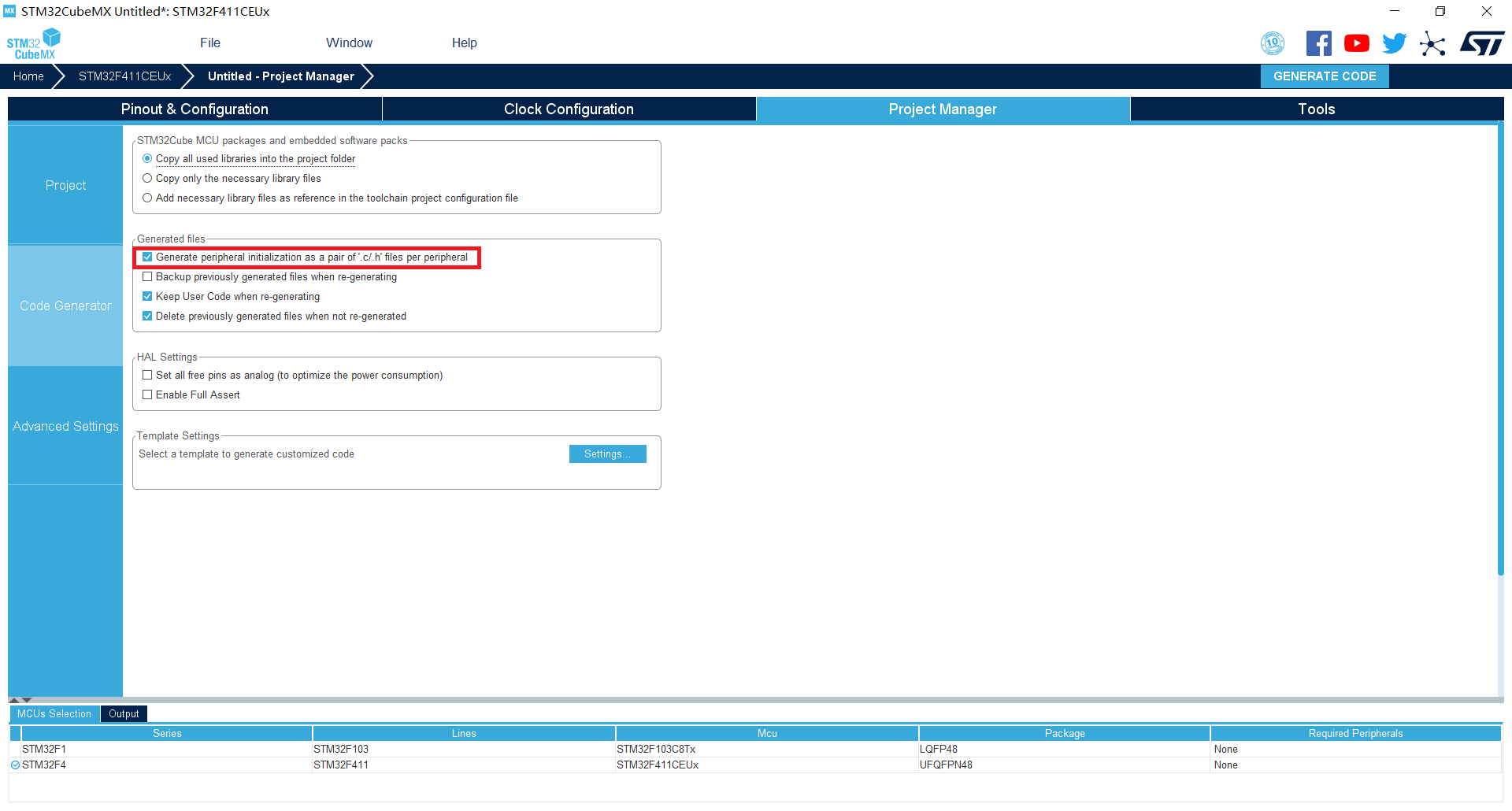
点击GENERATE CODE生成工程!
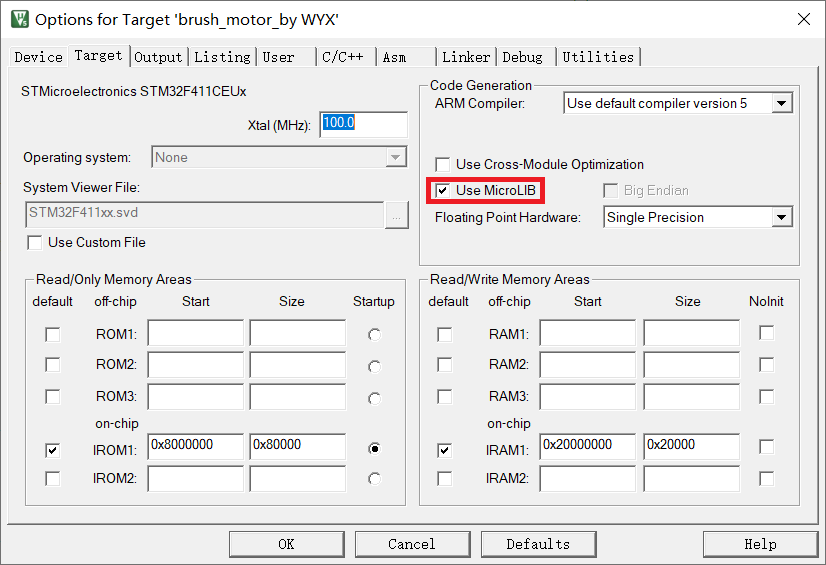
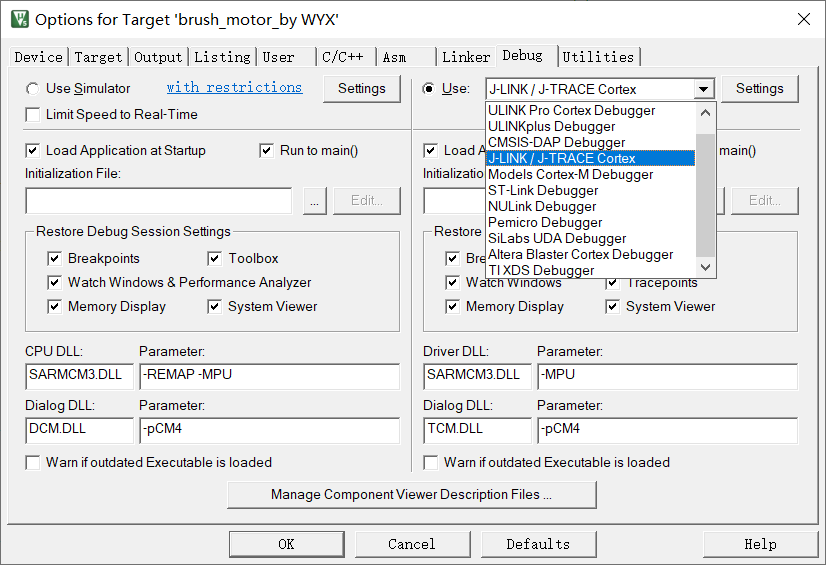
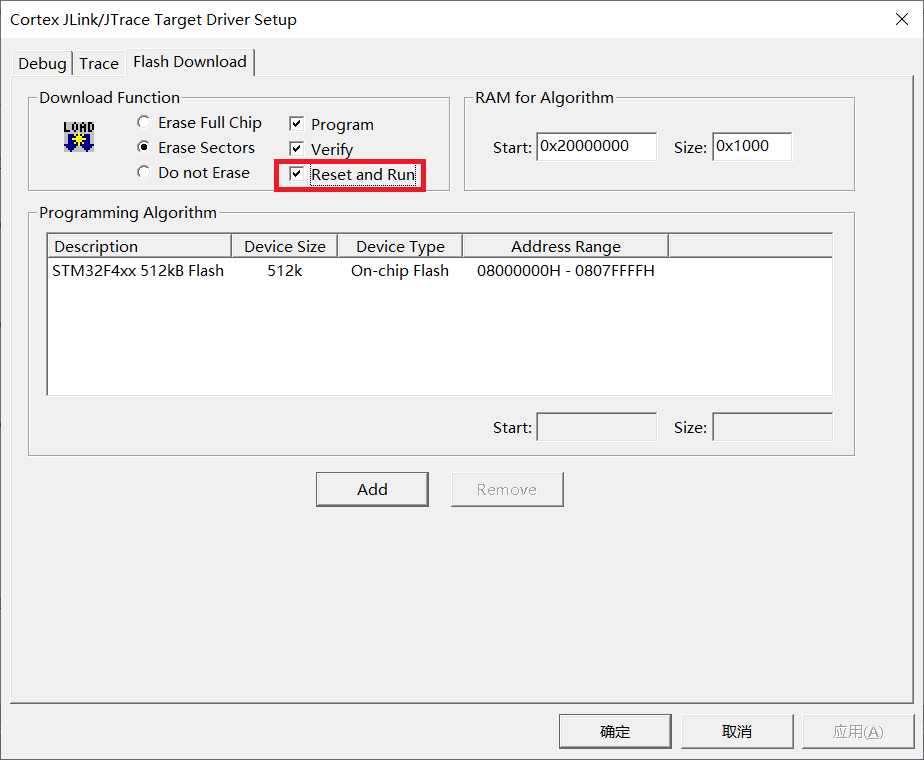
8、keil配置
打开工程配置,勾选“use MicroLIB”,Debug选择J-LINK,并在Settings-Flash-Download勾选“Reset and Run”,然后编译一次。
接下来加上串口重定向:
先包含头文件#include<stdio.h>,在/* USER CODE BEGIN 4 // USER CODE END 4 */之间添加以下代码:
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
工程基本配置ok!
三、驱动板L298N/TB6612
电机驱动需要驱动板,直接用单片机驱动是不行的。我们比赛时用的是L298N。
1、L298N
L298N驱动模块,可以驱动2个直流电机,可分别实现正转,反转功能。
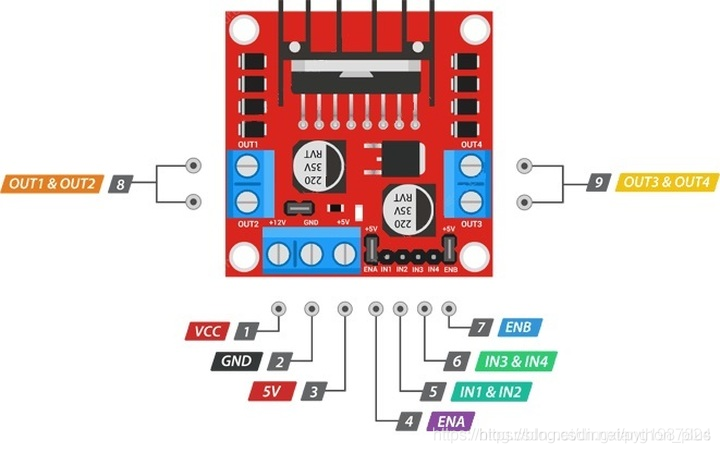
供电:L298N的12V和5V都接5V供电,GND不但要接驱动电源的GND。这里要和单片机连接在一起,要从这里再引出一根GND和单片机的GND相连(共地)。
OUT1、OUT2和OUT3、OUT4分别接两个直流电机Motor1两脚、Motor2两脚,IN1、IN2、IN3、IN4引脚从单片机接入控制电平,控制电机的正反转,ENA、ENB接控制使能端,控制电机调速,L298N控制逻辑关系图如下:

对于ENA通道使能引脚,若不考虑电机的转速,可接为高电平或低电平控制接通还是关断。
若需要控制电机的转速,则需要拔掉跳线帽,将其连接在单片机PWM输出上,通过调节PWM的占空比,以此来达到控制转速的目的。
转速控制原理:利用STM32 的IO输出不同占空比的脉冲信号来达到调速的过程,当占空比大的时候就表明在一个脉冲周期内高电平的时间越长,而脉冲信号输出频率极快,高电平的时间越长就表明在一段时间内IO口输出的控制电压越高,控制电压越高使得L298N输出的电压越高,这样就使得车轮的转速越快。
接线:
这里我们因为只要一个电机转,故OUT3、OUT4接电机的两脚,IN3、IN4分别接PA3、PA4控制转动方向,ENB接PA2输出PWM,12V供电脚和GND接12V锂电池,GND和单片机共地。
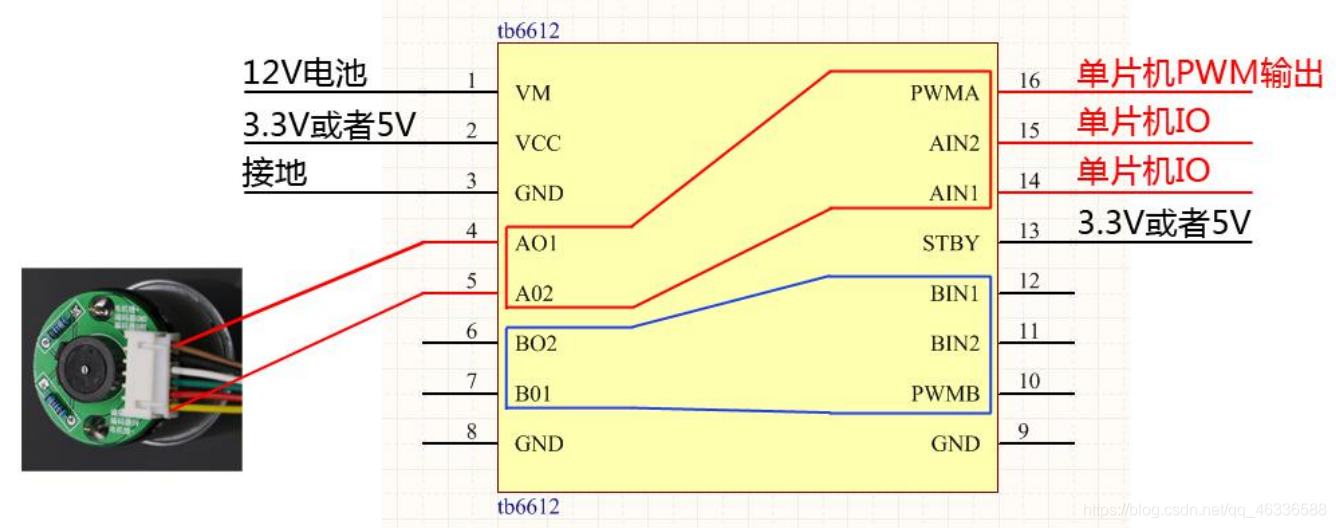
2、TB6612
原理、接线类似于L298N。此处不再赘述。
接下来是代码部分。
首先我们让电机转起来!
四、PWM控制
先写定时器PWM输出启动函数:
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim5, TIM_CHANNEL_3);
/* USER CODE END 2 */
然后写一个PWM调制函数void set_pwm(int pwm);
int型变量pwm的范围应在-100~100之间(ARR设定的值为100),将它赋值给CRR(通过调节CRR的值来调节PWM波占空比,进而实现转速控制)。pwm的正负表示转动方向,分别使PA3和PA4输出不同电平来控制方向(见逻辑表)。
/* USER CODE BEGIN 4 */
void set_pwm(int pwm)
{
//限定pwm范围
if(pwm > 1000)pwm = 1000;
if(pwm < -1000)pwm = -1000;
//转速控制
if(pwm < 0)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, 1);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, 0);
}
if(pwm > 0)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, 0);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, 1);
}
//写CRR的值调节占空比
TIM5->CCR3 = (int)fabs((float)pwm); //记得#include<math.h>
}
/* USER CODE END 4 */
比如,输出一个占空比50%的PWM波控制电机正转:
set_pwm(500);
OK本期就到这里。往后还有电机控制part2、3,分别分享PID、编码器相关。还有MPU6050移植从入坑到入坟。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通