【系列】关于NJUPT电赛自控方向第一次积分赛的总结
本人是NJUPT电子科学与技术专业大一摸鱼狗一枚。本博客旨在总结与分享个人准备电赛所学知识,同时也是为了防止遗忘,锻炼写文章的能力。目前电赛方向为自控方向。主要研究方向为单片机、图像处理、自动控制相关,往后会有数学建模等知识更新~
本系列讲解2022年南京邮电大学电子设计竞赛(自控组)第一次积分赛试题,分享我所在小组的比赛思路与过程。
本文先写下前言,试试水~后续有多篇文章更新(如果有空的话)~
话不多说,先上原题:
2022年南京邮电大学电子设计竞赛(自控组)第一次积分赛试题
A题:自适应姿态云台装置
一、任务
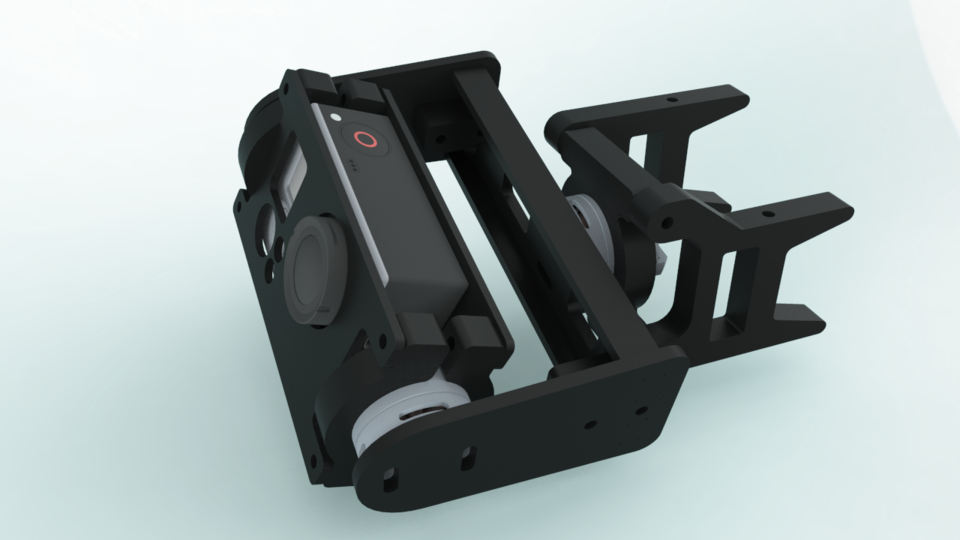
设计并制作一个能够自适应姿态变化的稳定云台装置。该装置能够感应单轴姿态发生的实时变化,并通过自动控制模块,能够提供抵消外界姿态变化提供稳定功能,安装在稳定器上的相机画面保持不变。示意图如下(仅做示意,不要求如此外观)。
二、要求
1、基本要求
(1)电机能够进行PID位置控制(选测3个典型位置:最大,最小,中间值)。(20分)
(2)电机能够进行PID速度控制(选测3个典型速度)。(20分)
(3)单片机实时读取姿态变化。(10分)
(4)根据外界姿态的变化,实时控制电机保持特定姿态保持不变。(10分)
2、发挥部分
在基本要求的前提下,能够有电位器调节云台转动,使得相机画面保持稳定变化(40分)
三、说明
1.结构自行设计,没有统一要求。
2.单片机、姿态传感器、电机等材料型号不做限制要求。
B题:目标识别与控制装置
一、 任务
设计并制作一个能够发现典型目标形态的装置,并根据目标的中心位置偏移,通过串口输出发送控制指令。
二、要求
1、基本要求
(1)能够识别颜色:四种识别案例,自选,例如红黄蓝绿,并自定义一种输出用于验证,例如串口/显示屏。(30分)
(2)能够识别形状,四种识别案例,自选,例如圆、直线、三角形、正方形,并自定义一种输出用于验证,例如串口/显示屏。(20分)
(3)能够对MAVLINK通信协议移植或者自定义一种无人机/小车主控兼容的通信协议,用于标识目标的中心位置。(10分)
(4)根据中心位置的变化,能够计算发送运动指令,让目标在画面正中心(手持摄像头运动示意小车/无人机的运动)。(10分)
2、发挥部分
在基本要求的前提下,能够有实物小车/无人机验证(40分)
三、说明
板卡、摄像头等材料型号不做限制要求。
由于我们队没有树莓派,openmv,k210等,而且买的话又要花点时间上手(积分赛大约two weeks),更何况我们没有现成小车与飞行器(突然感觉我们好穷:-)),故选A题。最终目标全部达成,就是因为PID没有调好,导致云台不太稳定。。。扣了点分。。。但PID参数是我们调了好久的最佳数据了→_→。后面的文章还会讲PID整定方法与实际过程。
敲重点!!!
(1)电机PWM控制
(2)电机速度检测
(3)电机角度检测
(4)电机PID速度控制
(5)电机PID位置控制
(6)MPU6050数据获取(IIC + DMP)
(7)单片机ADC采样
(8)与上位机或串口屏串口通信
后面的文章将详解以上思路与工程实操。
文章列表:
(持续更新中~)


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Ollama——大语言模型本地部署的极速利器
· 使用C#创建一个MCP客户端
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· Windows编程----内核对象竟然如此简单?
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用