机器人一阶运动学
回顾:https://www.cnblogs.com/pylblog/p/18529426
四关节机器人,可以末端关节位姿,表示为:
![]()
假设,机器人末端关机位姿,简化为如下公式:
![]()
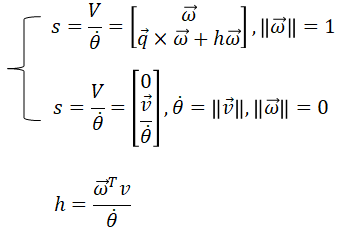
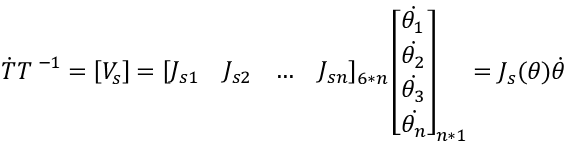
对齐求导,可得:
![]()
对于附合导数,自然有:
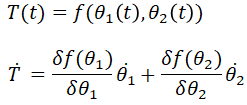
T的导数,自然是姿态的变化速度(末端局部坐标系下,x = [1,0,0] 处的速度向量),和末端原点的运动速度向量
![]()
那最终,其形式,为:
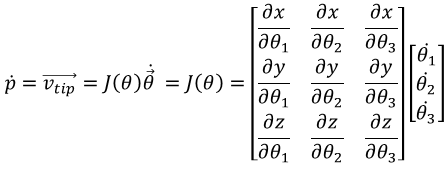
假设只对末端位置感兴趣(相当于取第4列),例如:
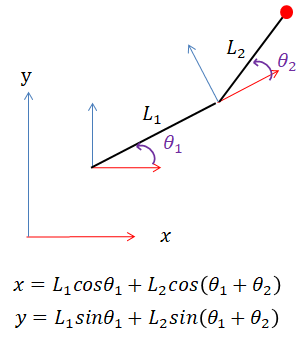
![]()
那么,末端的速度向量:

那么,观测此公式,可以得到结论:
(1)给定θ1,θ2,得到了初始的位姿
(2)在下一刻进行运动,给得各个关节 运动、转动速度θ1,θ2 ,求得此刻端点的速度向量。
力矩
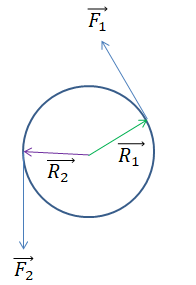
已知:
1. 圆中心固定,可以转动
2. F1,F2两个力大小相同,方向不同
作用方向相反的两个力,但作用于圆是一致的,所以用力矩表达:
![]()
![]()
速度与角速度关系
(以下公式都是标量,不考方向)
当 Δt 接近0时,弧长:
![]()
数值上:
![]()
假设作用在切向方向的力为F,那么,对于功率P :
![]()
因此:
![]()
以上公式的作用
假设末端关节,需要输出切向力 ftip ,求各个关节应该输出的扭矩
那么,末端的功率为:
P = ftipTvtip (向量点积为标量)
同时,由于能量守恒,各个关节给出的功率:
![]()
![]() 为该关节力矩的大小,力矩的方向为旋转轴方向,所以:
为该关节力矩的大小,力矩的方向为旋转轴方向,所以:
又:
![]()
因此:
如此得到各个关节要输出的力矩,就可以反馈给下位机了。
矩阵基本知识
![]()
![]()
当 AB = BA 时:
![]()
那么,可以推导:
![]()
![]()
![]()
所以记eA = f(A)
![]()
(对于旋转矩阵,若使用e[ω]θ方式并展开,就可以得到罗德里格斯公式,所以有:R = e[ω]θ = 罗德里格斯公式 )
eA 是 f(A) 的简写(只是恰巧有部分指数运算可以使用)
若:
![]()
那么:
![]()
因为:

![]()
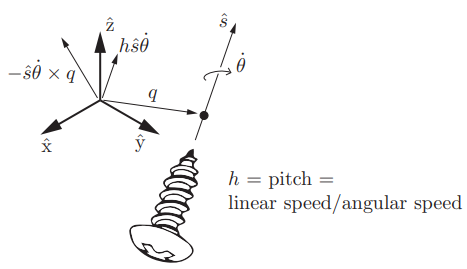
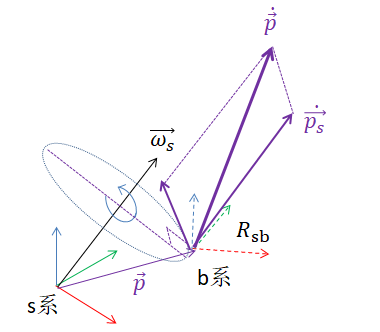
v = 切线速度 + 沿旋转轴方向的速度 , 相当于关机总速度
(此方法推的V,是末端关节在s的总速度;而T'T -1 推的V,则是整个s都移动下,s原点速度)
疑问:使用几何方法V的方式,和使用T'T -1 的v含义不同?
![]()
如果,不用几何的办法,纯粹推:
![]()
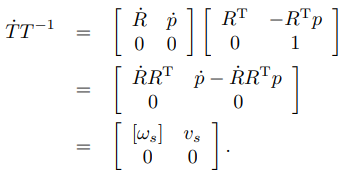
![]()
p' 是p点的线速度,vs = p' - RRTp = p' - [ωs]p,不就相当于:总线速度 - 旋转引起的切向速度 = 沿旋转轴的速度
空间雅可比矩阵
使用旋量方式计算末端关节位姿
![]()
利用多元函数求导法则:
![]()
![]()
![]()
暂且不管两种求运动旋量的方式的冲突,认为已经得到了T,按照:

![]()
令:
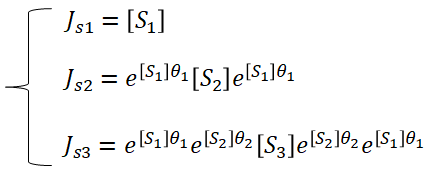
那么,可以得到:
(先不管两种求运动旋量的方式的冲突,暂时认为一种是用来计算T,一种是用来计算[Vs]就行了)
Js1、Js2.....Jsn实际上,就是机械臂运动到θ1、θ2、θ3时,各个关节的旋量
而推算T = e[s1]θ1 e[s2]θ2 e[s3]θ3..M,则是使用θ1 = 0、θ2= 0、θ3= 0,各个关节的旋量,参考:https://www.cnblogs.com/pylblog/p/18529426
例如:
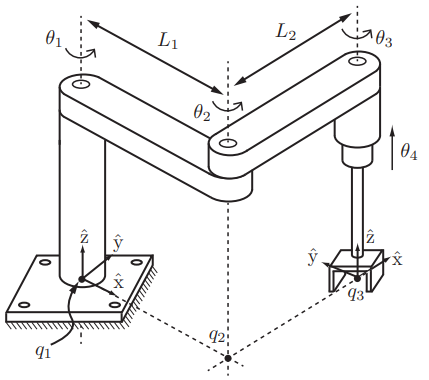

Js1:ω = [0,0,1]T,v = -[ω] q = -[ω] [0,0,0]T
Js2:ω = [0,0,1]T,v = -[ω] q = -[ω] [ L1s1 , L1c1 , 0 ]T = [ L1s1 , -L1c1 , 0 ]T
Js3:ω = [0,0,1]T,v = -[ω] q = -[ω] [ L1s1 + L2s12 , L1c1 + L2c12, 0]T = [ L1s1 + L2s12, - L1c1 - L2c12, 0 ]T
Js4:ω = [0,0,0]T,v = [0,0,1] ,(对于移动关节的运动旋量,其ω为0,v为运动方向单位向量,θ 为速度)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号