运动控制理论(4)——逆解
pw:世界坐标
P:最后一节点在最后一个坐标系下的局部坐标
在逆解中,Pw已知,P也已知,可以得到T,要由T得到θi,di (旋转和伸长)
正算的例子:
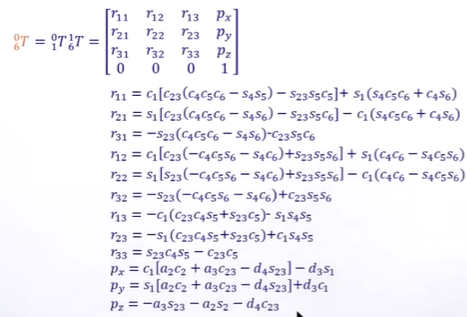
一般来说,正算的时候,不会用矩阵相乘的办法,而是将每个元素单独算,节省CPU开销
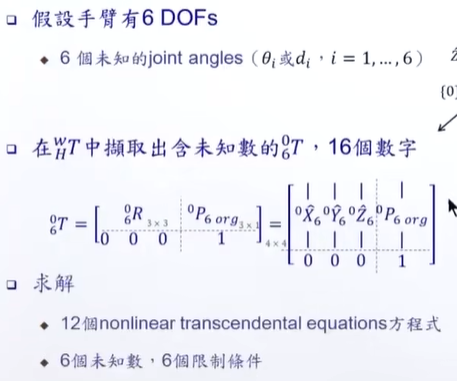
3 个长度为1 + 3个相互垂直 = 6个限制条件
3*3矩阵 + 3*1向量 = 12条方程
6个未知数
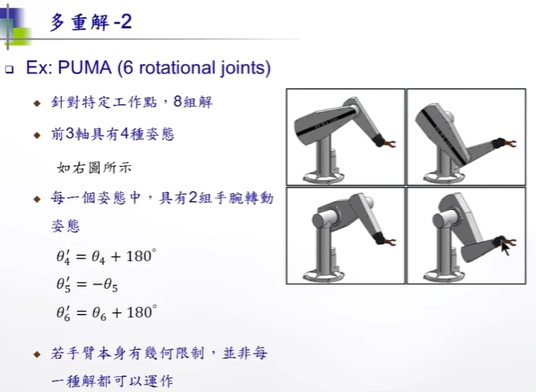
独立(线性无关)方程数 > 未知数,那么就是有多解了。
多解
求解方法:
一、解析法,分为:
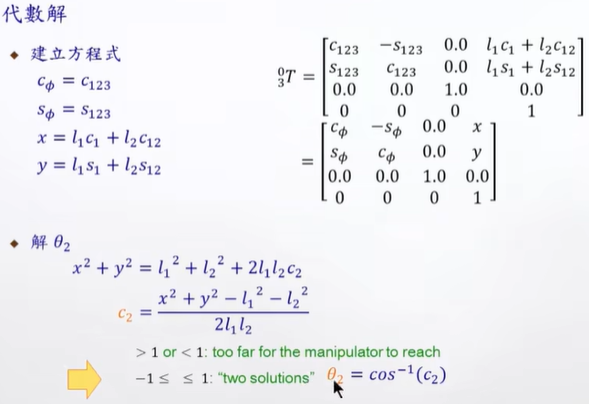
(一)代数法 algebraic。直接在方程式上,做加减乘除,合并消去。(不就相当于手算了)
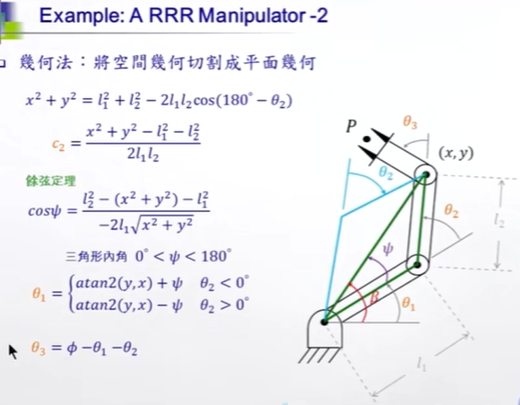
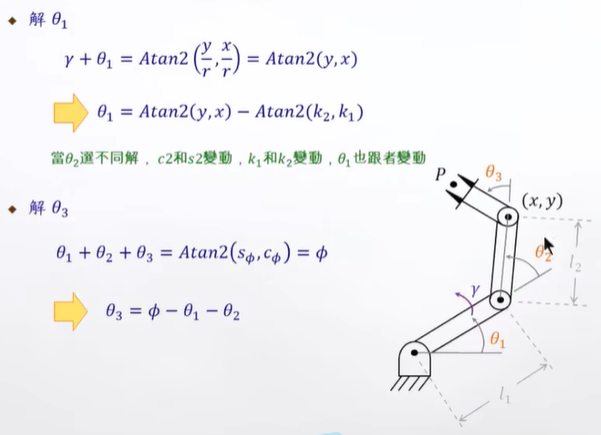
(二)几何法 geometric。用最后的几何,拆解成三角函数表示的方法。(是不是先算出手臂的各个向量,再反算角度???)
二、数值法。用电脑解方程。
* 目前大多数手臂设计成具有解析解。
* 解析解是real time控制中最快的。

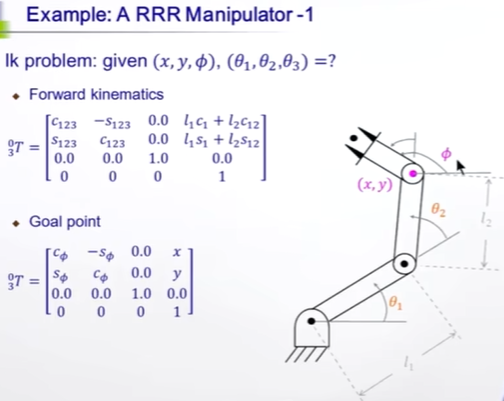
已知Φ,x,y
x,y,是世界坐标系下坐标,如果i = 3是末端,那么第4列就是x、y了
因为:https://www.cnblogs.com/pylblog/p/17962142
Pw = T03 P
P = [a3 , 0, 1],将P写出一个平移矩阵,就是上面例子的 03T
所以:03T 阵的每个元素,都可以根据给定Φ,x,y得到具体值,然后再推算θ1,θ2,θ3
(这点尤其重要,必须知道03T 阵的每个元素的具体值)
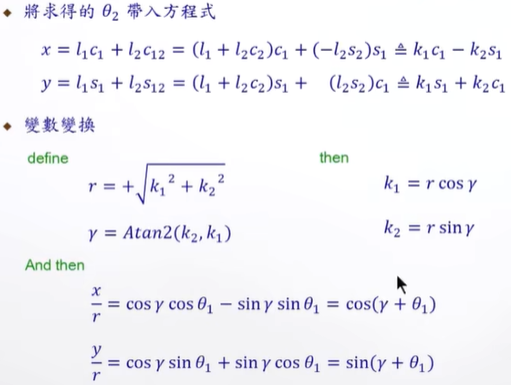
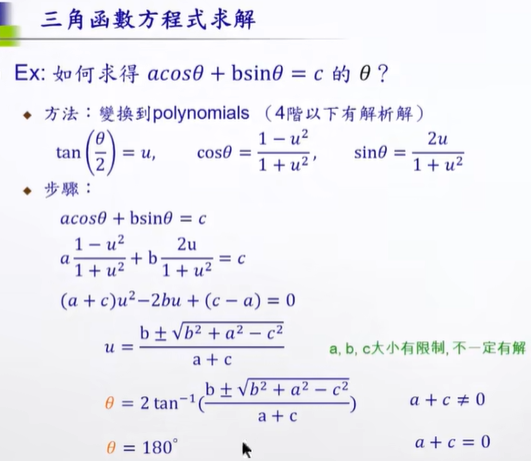
复杂的三角函数求解:

先知道"手腕"的位置,获得θ1,θ2,θ3。
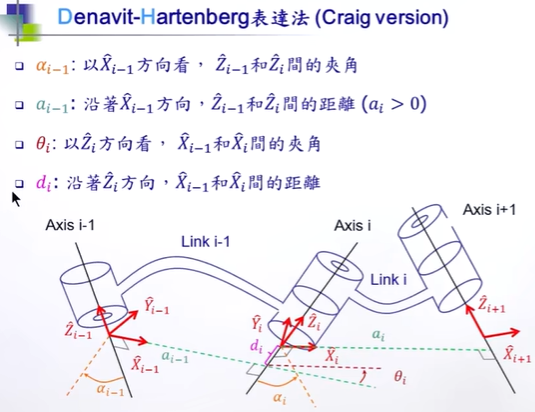
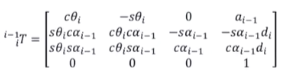
用Craig定义方式,得到通用的转换阵
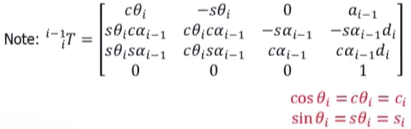
按照定义的步骤,一步步变过去,第四列就是变换后原点的坐标。
Pi = T ii-1* Pi-1, 当 Pi-1 = [ 0,0,0,1 ]T,即局部坐标系下的原点,那么T ii-1 的第四列,则为Pi
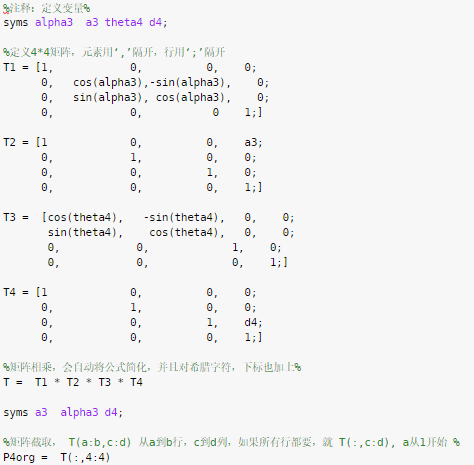
令:
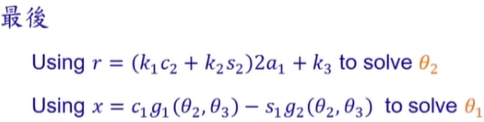
因为对于上面那个手臂:
沿X3方向看,Z3,Z4轴的夹角α3是已知,为90度;
沿X3方向看,Z3,Z4轴的距离a3是已知,就是臂长;
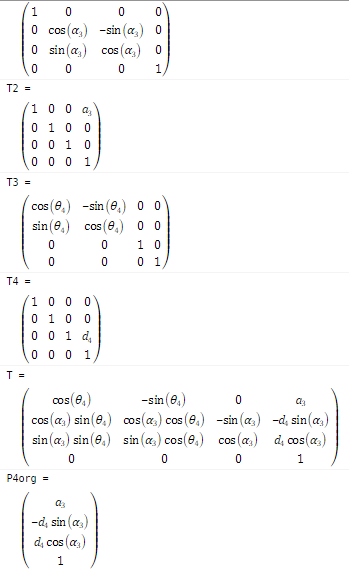
沿Z4方向看,X3,X4轴的距离d4是已知,应该为0;
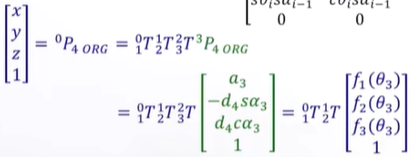
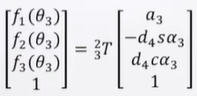
因此:P4org,局部坐标,完全是已知的,往前推一步,得到:
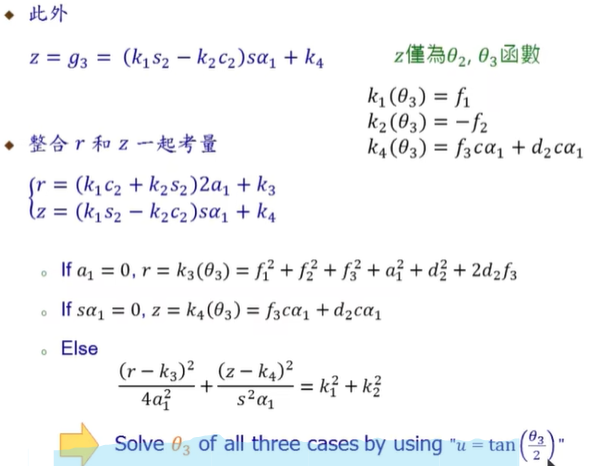
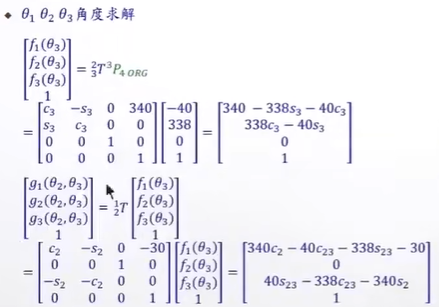
P24org = T23P34org = [f1(θ3),f2(θ3),f3(θ3),1] T即:
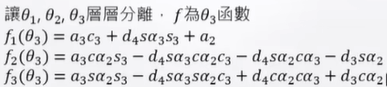
只有θ3是未知数。
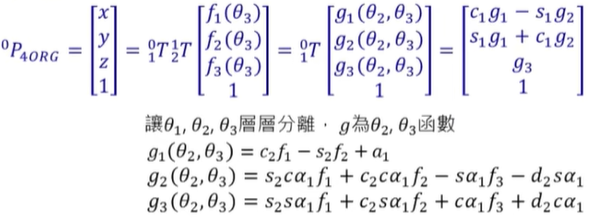
再拆一次:
P14org = T12P24org = [g1(θ2,θ3) , g2(θ2,θ3) , g3(θ2,θ3) , 1] T即:
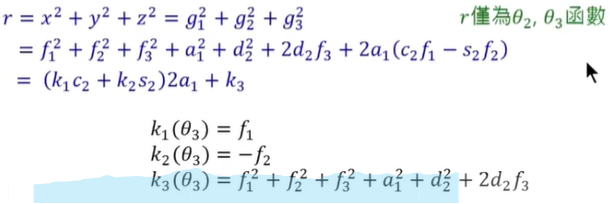
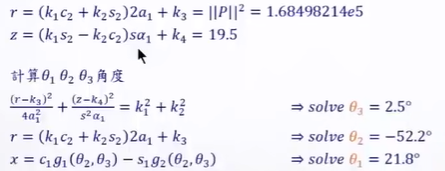
将 r = x2 + y2 + z2,消去θ1
例子:
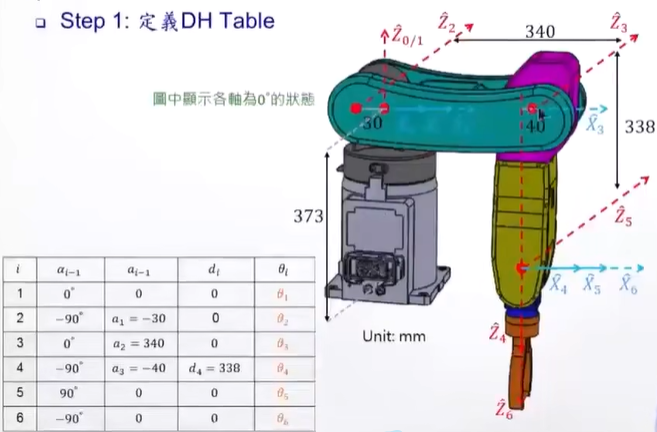
35°,是用视觉,或者其他设计系统,计算出来的,属于已知的东西。
***θ1貌似可以直接定35
也就是,如果知道物体在桌子的哪个位置,那么至少可以定下DH表上,最前或者最后的一个角度,消掉1到2个未知数。
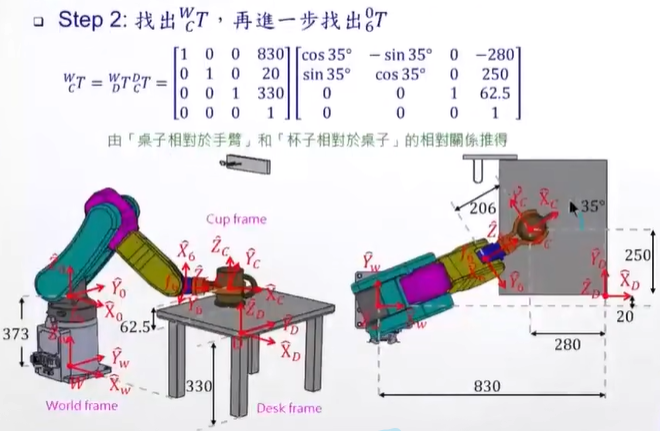
第一步:找到Twc,就是世界系 - 物体中心系之间的转换。

第二步:找到Tw0 、T6c , 求出T06
Tw0 就是基座高度相关
T6c 就是物体中心到第6关节的转换
都是属于已知的,根据尺寸可以算出。
而T06 的第四列,就是6系原点,相对于0系系的坐标:P06org
由于4系、6系的原点是同一个,因此P06org = P04org
第三步:计算θ1、θ2、θ3
(注意到,第四列是和θ无关的)

得到:
代入第四列,直接得到P34org
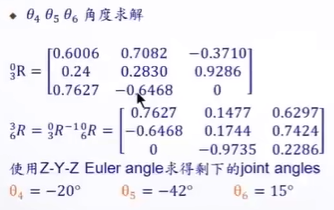
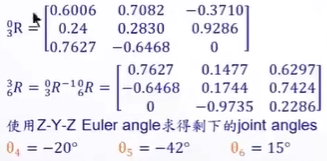
第四步: θ1、θ2、θ3 , 得到R03,然后根据 R06 已知,得到R36

 浙公网安备 33010602011771号
浙公网安备 33010602011771号