组合导航原理(八)——关于角速度
直观认识角速度:https://www.cnblogs.com/pylblog/p/17114498.html
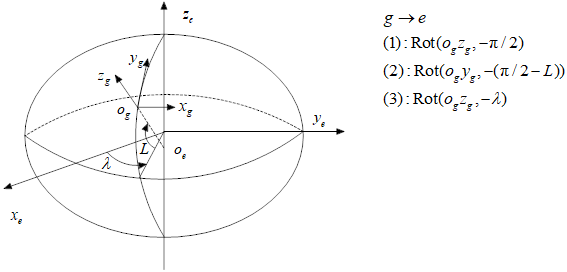
g系就是n系,《捷联式导航算法与组合导航原理》p50
(书上的n系是北东天的,所以这里要注意)
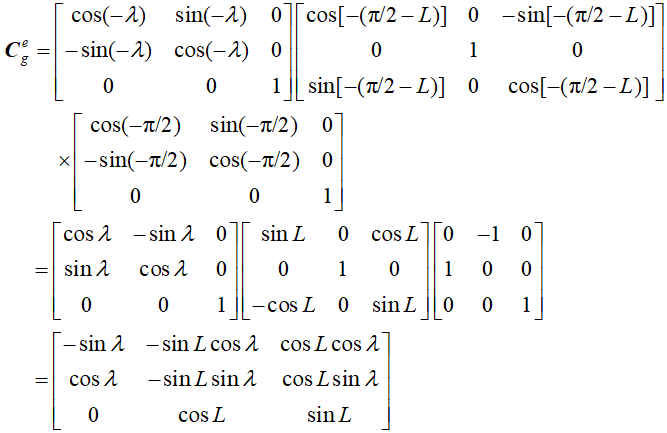
(1)绕Z轴顺时针旋转90度,那么n系的y轴,大致与e系y轴同向了,差一个λ
(2)再绕旋转后的n的y轴,顺时针旋转 L - Π / 2,那么n和e的XY平面平行了
(3)再绕旋转后的n的z轴,顺时针旋转 λ,最终重合。
这些转角,是n相对于e的旋转,并且绕n的轴进行的,记为 Δθnen
又根据方向余弦矩阵求导:

对比:
![]()
![]()

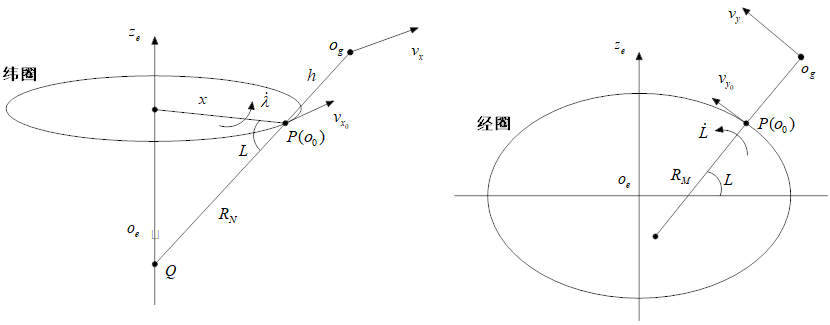
(再N系中,x方向是E方向)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号