组合导航原理(七)——位姿算法更新总结
IMU输出的是:
t时刻的角度增量:Δθ(t) = ∫ wbib(τ)dτ
t时刻的速度增量:Δv(t)= ∫ fb (τ)dτ
t时刻的增量,是相对于t-1时刻而言,并不是初始时刻,这个要特别注意。
而角度增量Δθ(t)、速度增量Δv(t)中,抹掉了很多信息,比如:
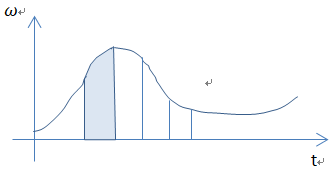
输出的蓝色的面积,但是曲线细节没有展现。
以wbib为例,因为wbib 是时变的,也就是三轴角速度不是一个定值,那么【旋转向量】就是飘忽不定的。
所以如果直接拿Δθ做旋转,相当于肯定了wbib 为定值,从而【旋转(轴)向量】是固定的,从而产生了误差。
(猜测:单轴旋转了一点a,再旋转回去b,对于IMU输出,就是Δθ = a - b,但是旋转本身,是不能通过角度相加的)
为了消除这个误差,要将wbib 引出,找到它与【等效旋转向量】的关系,从而:
【等效旋转向量】 Φ(t) = F (Δθ, wbib(t)) 形成一个复合函数,这个复合函数中,IMU的输出Δθ则变成一个常量值,解出【等效旋转向量】,再用来进行旋转。
(引出wbib 对【角度增量】的作用,再假设wbib(t) = f(Δθk-2 , Δθk-1 ,Δθk ),就可以解除Φ(t)的复合形式,最终解得【等效旋转向量】)
(【旋转向量】我认为是一个概念,而【等效旋转向量】是实际具体干活用的对象)
至于速度也是同一个道理:
所以如果直接拿Δv做位移,那么就肯定了【加速度】是恒定的。
为了消除这个误差,要将fb引出,找到它与【等效速度增量】的关系,从而:
【等效速度增量】 = F (Δv, fb(t))形成一个复合函数,这个复合函数中,IMU的输出Δv则变成一个常量值, 解出【等效速度增量】,再用来进行速度计算,从而得到位移。
(引出fb 对【速度增量】的作用,再假设fb (t)= f(Δvk-2 , Δvk-1 ,Δvk ),就可以解除复合形式,最终解得【等效速度增量】)
(【速度增量】我认为是一个概念,而【等效速度增量】是实际具体干活用的对象)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号