组合导航原理(一)
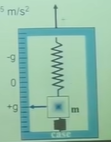
IMU垂直方向输出(当以上为正方向时):
(1)静止时: 约等于-g
(2)运动时:a - g
(3)实际加速度 a = 输出 + g
一维惯性导航
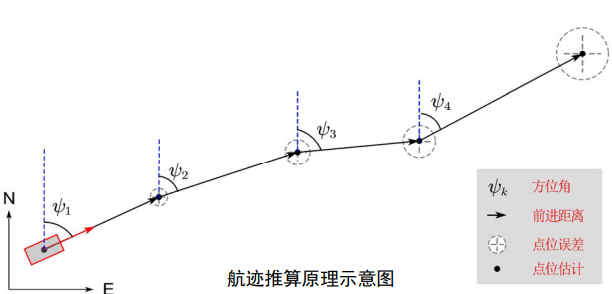
理解:
(1) 假定 【前进方向】与【传感器方向】是一致的。
(2)一开始,测定【前进方向】的【方位角(Azimuth)】
(3)假设某时刻 t 角度增量 > 0 , t + 1时刻角度增量为0 , 那么 t 到 t+1时刻的位移可以直接算出。
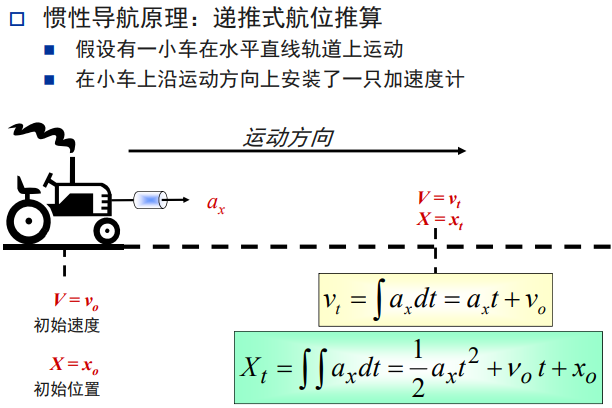
使用加速度求行走距离
平台式系统
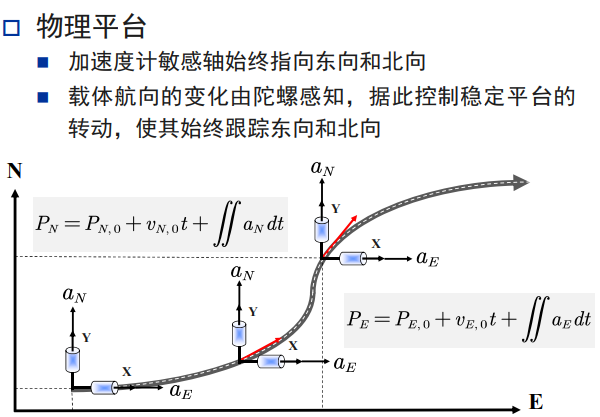
理解:
(1)【前进方向】与【传感器方向】不一致,传感器正向一直是指向【参考系】正方向的。
(或者说,前进方向与传感器方向,关系是一直在变的)
(2)蓝色【小圆柱】应该代表的是一小段时间
捷联式
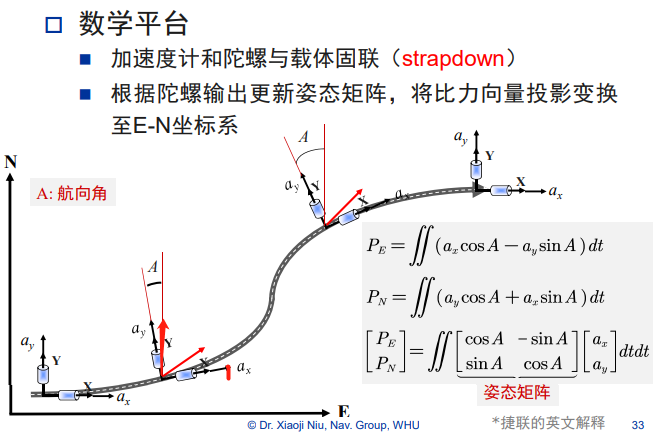
理解:
(1)前进方向与传感器方向(或载体主轴与传感器主轴),关系是固定的。
(2)传感器始终是输出他主轴方向的加速度
(3)加速度是矢量,因此可以使用【向量投影】、【向量相加】的方式叠加。
(4)【姿态矩阵】,相当于引入了【旋转】
(5)A不是直接由陀螺给出的,陀螺只能给出【角速度】,猜测:
在t1测得角度a1
在t2测得角度a2
a1在 [ t - 1, t ]怎样变到a2的,不知道,假设在[ t - 1, t ]期间,【角速度函数】为 f(t)
假设 f(t) = kt + b ,也就是角速度是均匀变换化的,那么 k = Δa / Δt , b = a1 - k * t1
f(t) = k t + b
角度增量 = ∫ f(t) dt,积分范围是 [ t1, t2]
∫ f(t) dt = 1 / 2 * k * t2² + b * t2 - 1 / 2 * k * t1² - b * t1
= 1 / 2 * k * ( t2² - t1² ) + b * (t2 - t1)
= 1 / 2 * Δa * ( t2 + t1 )+ (a1 - k * t1)Δt
= 1 / 2 * Δa * ( t2 + t1 )+ a1 Δt - Δa * t1
= 1 / 2 * Δa * Δt + a1 Δt
 (中间部分放大)
(中间部分放大)
At = At-1 + 角度增量

 浙公网安备 33010602011771号
浙公网安备 33010602011771号