非线性优化
参考: 卡尔曼滤波(一) - 耀礼士多德 - 博客园 (cnblogs.com)
参考:相机模型 - 耀礼士多德 - 博客园 (cnblogs.com)
卡尔曼滤波模型有两条方程:
1. 运动方程:xk = f(xk-1,uk) + wk 。 uk是系统控制量,有可能是常数、wk 是过程噪声服从高斯分布
2. 观测方程:Zk,j = h(yj,xk) + vk,j 。 观测方程。vk,j 是测量噪声
Vk ~ N(0, Qkj) : Vk 服从 均值为0 , 协方差矩阵为Qkj 的高斯分布,下标为kj ,因为每个时刻k,测到每个点j,都对应一个Q
对于【观测方程】,可以以一张照片的【针孔模型】为例:
如果测量无误差,即vk,j = 0,有:
Zkj = K(Ryj + tk)
Zkj 为点在照片上的坐标,可以由Zkj = s * zk,j , zk,j 为像素的索引,s为像素的长或宽
K是内参矩阵
R是旋转矩阵
tk是平移向量
yj是已知点,或者叫【路标】、【控制点】(可以由GPS,全站仪等设备给出)
(Rkyj + tk) = Tyj , T是欧氏矩阵,表示相机位姿。
那么,xk = Tk ,也就是说,相机的【位姿】就是要估计和优化的对象。
估计Tk,通常有两种方法:
1. 使用卡尔曼滤波。特点:不用采集所有数据,每次都估计【最后一个T】,用于实时估计
2. 使用【批(batch)】处理法。类似于平差,最小二乘整体求参,能得出【每个T】,用于采集后估计。
假设从1到N,有:
1. 机器人【位姿】x = { x1,......xn }
2. 已知点【坐标】y = { y1,......yn }
贝叶斯公式
P(A | B), 在B事件已发生的情况下,发生A事件的概率。
那么:P(A | B) = P( B |A ) *P ( A ) / P( B )
由来:P(A∩B) = P(A) * P(B | A) = P(B) * P( A | B) , P(A∩B) = AB同时发生的概率 :
1. AB同时发生的概率= A发生的概率 * A已发生的情况下B发生的概率
2. AB同时发生的概率= B发生的概率 * B已发生的情况下A发生的概率
P( x,y | z, u )的意思是,在已知观测数据 z ( 点在相片上的位置 )、u(可能是常数)时,控制点坐标 & 相机位姿的概率分布函数。
(如果没有u,就写成 P( x,y | z))
使用【贝叶斯公式】:
![]()
(是不是因为z,u是实际得到的,所以概率为1???)
关于先验后验



argmax 函数,当我们有另一个函数y=f(x)时,若有结果x0= argmax(f(x)),则表示当函数f(x)取x=x0的时候,得到f(x)取值范围的最大值
![]()
(x,y)*MAP = argmax P(x,y | z, u) 翻译:
1 . 第一个等号,当 【位姿、路标是(x,y)*MAP 】时, 概率分布函数P取得最大值。
2 . 第二个等号,在什么样的 位姿、路标下,最有可能得到这样的观测数据
后验概率最大化下,求得位姿
Zk,j = h(yj,xk) + vk,j
因为 :Vk ~ N(0, Qkj)
所以: P(Zk,j | yj,xk) = N( h(yj,xk) , Qkj)
翻译:
1. P(Zk,j | yj,xk) , 在位姿为Xk, 控制点坐标为yj的情况下,控制点在照片位置Zk,j 的概率
2. Zk,j 的 均值是h(yj,xk) , 其方差和Vk 方差一样,等于Qkj
k时刻,j点在照片中的位置:Zk,j = [ukj,vkj] T
任意维度的高斯概率分布函数 z ~ N ( μ , ∑) , z、μ , ∑,都是矩阵形式
(7 封私信 / 80 条消息) 多维高斯分布是如何由一维发展而来的? - 知乎 (zhihu.com)
高位高斯分布的推算,还用到:
1. 主成分分析:测绘线性代数(四):数学期望、协方差、PCA - 耀礼士多德 - 博客园 (cnblogs.com)
2. 主成分分析,主要目的是【去相关】,然后就可以用相互独立的观测量推算高维高斯分布,到最后【回代】就可以了。
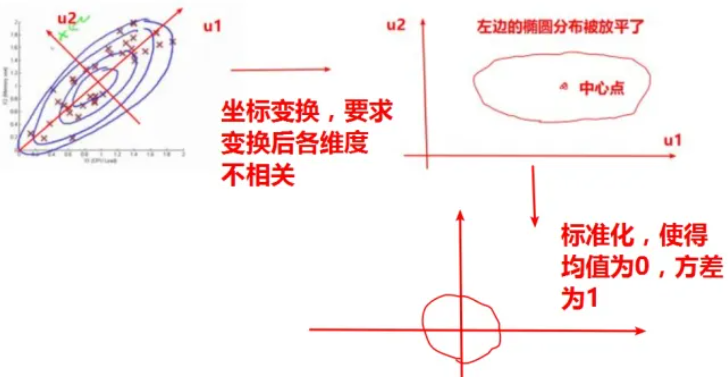
高维高斯概率分布密度函数
![]()
按照【高维高斯概率分布密度函数】的理解:
∑ = Qkj
要求得P( z )的最大值时,对应的Xk ,翻译:
1. 求得什么样的Xk ,使得 z = z的概率最大。
2. 求得什么样的位姿,使得得到观测值Z 的概率最大。
对【高斯概率分布密度函数】,进行变换:
![]()
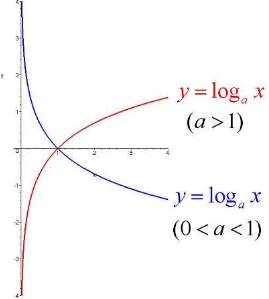
a = e > 0
所以 ln(P(x)) 是单调递增(红色)
求P(x)最大化,相当于对 ln(P(x)) 求最大化
对 ln(P(x)) 求最大化,相当于对 - ln(P(x)) 求最小化
【要求得P( z )的最大值时,对应的Xk 】(数学语言:x = argmax(P(z))),转化为:
1 .用高斯概率分布密度函数解析,求得 - ln(P(x)) 最小化时,对应的Xk ,数学语言 Xk = argmin( - ln(P(x)))
2 . 对于上式,1 / 2 * ln( (2π)Ndet(∑)) ,和Xk 无关 ,因此,转化为:
3. 用高斯概率分布密度函数解析,求得 (x - μ)T∑-1(x - μ) 最小时,对应的Xk ,这里的∑对应的是Qkj
4. 最终问题为,求得位姿 Xk , 使得(x - μ)T(Qkj)-1(x - μ) 最小,数学语言 xk = argmin [ (x - μ)TQkj(x - μ) ]
5. 最终结果,求得位姿 Xk = argmin[ (zk,j - h(yj,xk) ) T (Qkj)-1 (zk,j - h(yj,xk) ) ]
(zk,j - h(yj,xk) ) T (Qkj)-1 (zk,j - h(yj,xk) )
令:
en*1 = zk,j - h(yj,xk) = [e1,e2,e3...] T
E1*1 = (zk,j - h(yj,xk) ) T (Qkj)-1 (zk,j - h(yj,xk) ) = eT (Qkj)-1 e
(E 就是一个二次型,由e12 、e22 、e32 组成)
记住:最终问题为,求得位姿 Xk ,使得E最小
(答案: Xk = (HT∑-1H)-1HT∑-1y,測量平差中的加权最小二乘法)
注意:H是h(yj,xk) 关于xk的系数矩阵,y是将xk 线性化后的常数列向量
简单线性系统:
模型:
xk = xk-1 + uk + wk wk ~N(0,Qk) : wk 是误差,服从正态分布
Zk = xk + vk Vk ~N(0,Rk) : Vk 是误差,服从正态分布
误差方程:
e1 = xk - xk-1 - uk , 注意到,如果按照模型方程,wk应该写在括号左边,但是e和w是不同的概念,w相当于是一个象征,而e是可以最终回代计算出来的
e2 = xk - zk
假设有时间k = 1,2,3 , X0已知(注意),那么有:
x = [ x0,x1,x2,x3 ]
z = [ z1,z2,z3 ]
u = [ u1,u2,u3 ]
还有对应的协方差阵 Q1,Q3,Q3, R1,R2,R3
那么,其实就是要求得 x1, x2 ,x3 ,使得以下概率最大:
![]()
(回顾上面的高维高斯分布)
等价于:
求得 x1, x2 ,x3 ,使得以下值最小:
f = ∑e1 TQk-1e1 + ∑e2 TRk-1e2
要求得这个结果:
1 . 其实就是解线性方程组的【加权最小二乘解】:
0 = xk - xk-1 - uk
0 = xk - zk
( 假设e = 0的解,实际上e不为0,当时强行解,就得到最贴合的 x = argmin( f ) 的解)
令: y = [uk , zk] T
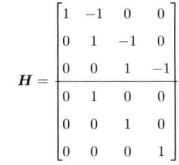
(注意,如果x0是已知的,那么H第一列应该去掉,同时 y1,1 = uk - x0)
那么,原式子为:
e = y - HX e~ N(0,∑)
∑ = diag ( Q1,Q3,Q3, R1,R2,R3), diag()是使用Q1,Q3,Q3, R1,R2,R3 形成对角矩阵或对角分块矩阵
注意:f也要重新写成矩阵形式
2 . 使用矩阵求导: ∂f / ∂x = 0,得到f的极小值时的X4*1
∂f / ∂x = HT∑-1e = HT∑-1(y - HX) = 0 等价于 :HT∑-1HX = HT∑-1y ( 可以看成 Ax = b,直接高斯消元法解,没必要求逆浪费算力 )
3. 最终得到:X = (HT∑-1H)-1HT∑-1y
迭代解法
一阶&二阶梯度法
假设观测方程:
Z = G(X) + U(Z为观测值)
可以转化为误差方程:
E = F(X) = G(X) + U - Z
目的:求得ΔX = argmin(F(X)),注意,整个目标,与要求概率Δx = argmax(P(z)),之间差了一个∑:
Δx = argmax(P(z)) 转化为 Δx = argmin( eT∑e),也就是Δx = argmin( F(X)T∑F(X))
假设有误差方程:
ym*1 = F(X) (如果是泰勒一阶展开线性化后,就为 ym*1 = Am*nXn*1 + y0)
要求得X , 可以令 X = X0 + ΔX , X0可以通過其他手段,例如:估算,或从其他一个观测方程中得到近似值,属于【已知的常数】
那么,原问题变为:
F(X) = F(X0 + ΔX)
对F(X)进行泰勒二阶展开
F(X) ≈ F(X0) + J(X)(X - X0) + 1 / 2 * (X - X0)TH(X) (X - X0)
因为 ΔX = X - X0
F(X) ≈ F(X0) + J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX
ym*1 = [f1(X),f2(X),.....fm(X)]T
拿其中一条式子来拆分分析
J1 = [∂f1 / ∂x1 , ∂f1 / ∂x2 ....∂f1 / ∂xn] 为 1 * n
ΔX = [Δx1 , Δx2 ....Δxn] 为 n * 1
H1 为 n * n
y1 ≈ f1(X0) + J1ΔX + ΔXTH1(X) ΔX
整个式子分析
F(X) ≈ F(X0) + J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX
J(X)为【雅可比矩阵】(一阶导数阵):
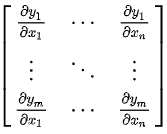 (对X进行偏导,然后式子再用X0代入,得到的其实是X0处的斜率)
(对X进行偏导,然后式子再用X0代入,得到的其实是X0处的斜率)
J为 m * n
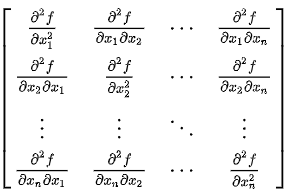
H(X)为【海塞矩阵】(多维函数二阶偏导):
H(X) 为分块矩,对角线上分别为一个Hn(X) ,每条方程的海塞矩阵
H(X) 为n * n * m 行和 n * n * n 列
ΔX = argmin(F(X)) 方法一:
F(X) ≈ F(X0) + J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX
ΔX = argmin(F(X)) ≈ argmin(F(X0) + J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX)
等价于
ΔX = argmin( J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX)
那么,对J(X)ΔX + 1 / 2 * ΔXTH(X) ΔX 求关于ΔX的导数,并令其为0,得到F(X)的极小值,得到:
J(X) + H(X) ΔX = 0
ΔX = H-1(X)J(X)
证明: ∂(XTA X) / ∂X = 2AX
f(X) = XTA X , 是1*1的

根据【函数对向量求导】:∂ f(x) / ∂ Xn*1 是 n * 1 的
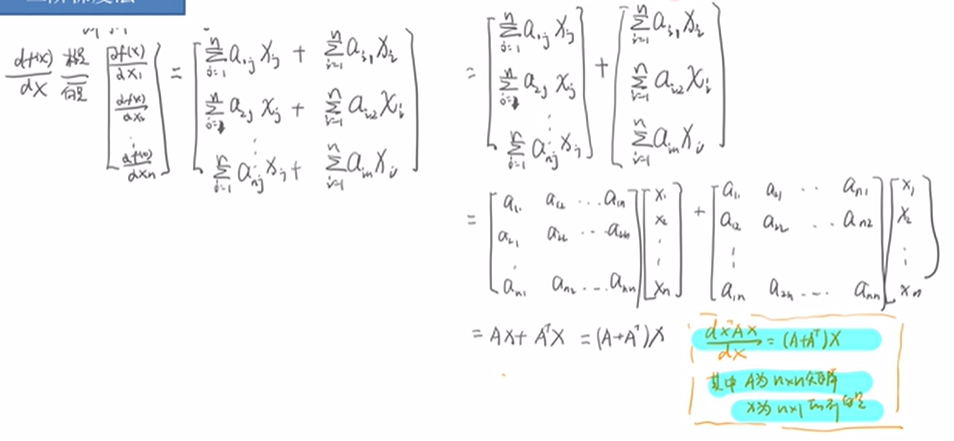
∂(XTA X) / ∂X =(A+AT)X
因为A是对称的,所以 ∂(XTA X) / ∂X =(A+AT)X = 2AX
(注意,实际很少使用这个,因为【海塞矩阵】比较不好求)
X = argmin(F(X)) 方法二:
仅仅进行一阶展开:
F(X) ≈ F(X0) + J(X)(X - X0)
求 ΔX = argmin(F(X)) ,等价于求:
ΔX = argmin [ 1 / 2 (F(X0) + J(X)(X - X0) ) 2]
(之所以这样,是为了后面求导公式消去2)

然后求关于ΔX导数,并令其为0
![]()

唯一要求是J列独立,那么 JJT才可逆, ΔX 唯一
证明:J列线性无关,JJT可逆
J列独立, JΔX= 0 ,ΔX有非零解
(JΔX)TJΔX = 0
ΔXJTJΔX = 0
ΔXTJTJΔX = 0
ΔXJJTΔX = 0
JJTΔXJJTΔX = 0
JJTΔX = 0
因为ΔX有非零解,所以JJT列线性无关,列线性无关的方阵是可逆矩阵
有时候J可能会病态,每次解算出的ΔX都大,导致X不容易收敛。
(J病态通常是控制点分布过于集中,导致多行近似线性相关)
衡量ΔX 好坏的指标
ρ = 误差函数实际下降的值 / 模型下降的值
ρ = [ f(X + ΔX) - f(X) ] / JTΔX
ρ 越接近1 ,证明使用这个模型来算,与实际得出的结果越相符
改进版线性优化步骤

注解:
1. Dn*n为系数矩阵,应该是对ΔXn*1进行加权用的,通常为 I,或者非负的其他对角阵(能不能用Σ求得权阵用呢?)
2. || Dn*n ΔXn*1||² 是一个距离平方,那么ΔX1² + ΔX2² +ΔX3² + ...≤ μ (X如果是位姿,那么就是 1″,1mm之类的经验值,限制∑ΔXi² 不能太大)
有没有办法没有那么啰嗦?
条件极值杀手——拉格朗日乘数法 - 知乎 (zhihu.com)
准备知识:

此处的拉格朗日函数:
![]()
对£进行关于ΔX的导数,并且∂£ / ∂ΔX = 0,得到:
(H + λDTD)ΔX = g (g往上翻能看到)
解得ΔX
nm

 浙公网安备 33010602011771号
浙公网安备 33010602011771号