相机模型
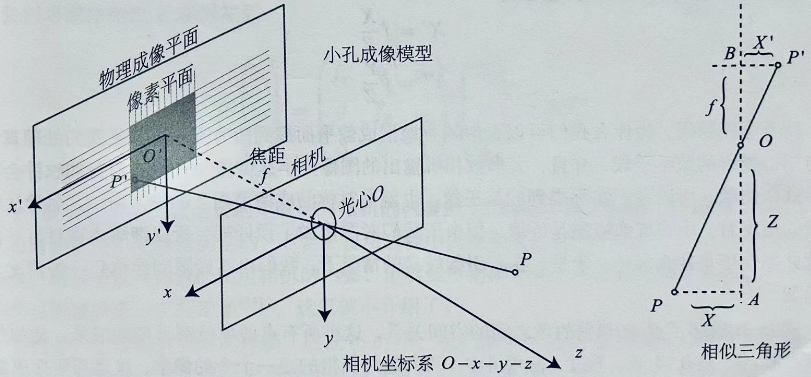
坐标系定义:
1. 以相机光心为原点
2. 垂直于像素平面方向为Z轴
3. 平行于像素水平排列方向为X轴
4. Z x X 为Y轴,叉积
P点的坐标:
1. 像面 [X', Y', Z']T
2. 实物 [X , Y, Z ]T
(注意:Z不是垂直方向的,并且注意到坐标系的定义方式)
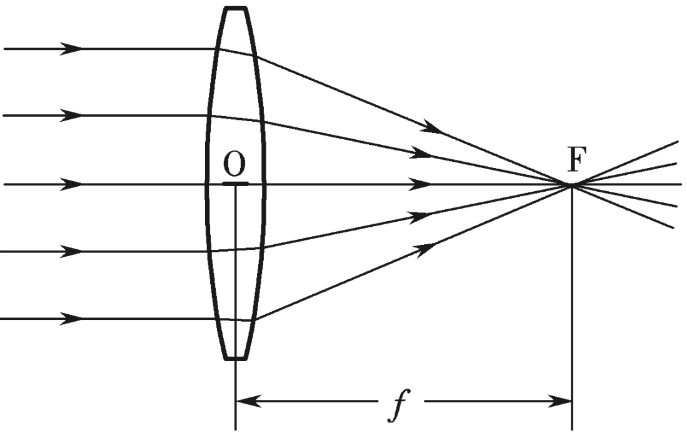
因为相机会自动将照片翻转,所以根据相似三角形原理,可以得到:
f = Z / f = X / X' = Y / Y'
X' = f * X / Z ....................(1)
Y' = f * Y / Z ....................(2)
又由于,像素坐标系,通常是:
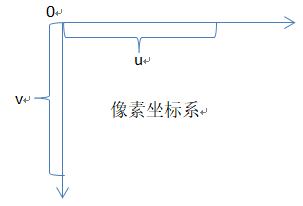
那么又有如下公式:
u = α X‘ + cx ........................(3)
v = β X‘ + cy ........................(4)
u,v大于0,而且是整数,而X’、Y'就不一定大于0了,也不一定是整数
(在原来相机坐标系下缩放、平移,最终成了相片)
每个相机应该都是可以输出不同大小尺寸的照片的
将(1)、(2)代入(3)、(4),得到:
u = α * f * X / Z + cx
v = β * f * Y / Z + cy
令:
fx = α * f(横向缩放比例 * 焦距)
fy = β * f(纵向缩放比例 * 焦距)
则:
u = fx * X / Z + cx
v = fy * X / Z + cy
写成矩阵形式:
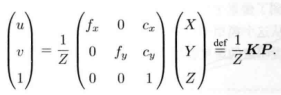
等价于:
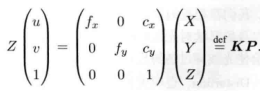
K , 就是【内参矩阵】
总结:
1. K其实内容是α、β、f、cx、cy。
2. cx、cy理论上是 - W / 2,- H / 2,因为原点挪到左上角了,W,H是横向像素个数与纵向像素个数。
3. K需要标定,因为仅仅靠出厂提供的参数,会随时间发生不准。
4. P是相机坐标系下,实物的坐标(X,Y,Z)T
已知:
【相机坐标系】下P点坐标:P = (X,Y ,Z)
【世界坐标系】下P点坐标:Pw = (Xw,Yw,Zw)T
【像平面坐标系】下P点坐标:Puv = (u,v,1)T
P = RPw + t
那么,有:
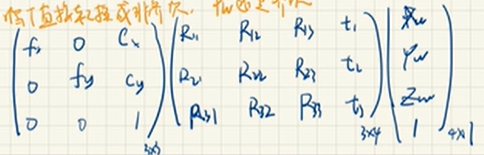
ZPuv = KP = K(RPw + t)
R3*3为【旋转矩阵】
t3*1 为【平移向量】
因为RPw + t ,可以写成特殊欧式阵T4*4:
![]()
那么:
ZPuv = KP = KTPw
注意:T不是欧氏矩阵,而是一下形式,结果与 K3*3(R3*3Pw + t) 是一致的
注意:也可以将T写为4*4的欧氏矩阵, Pw写为4*1,乘完之后选前3行,再与K相乘
R,t又称为相机的【外参】,旋转 + 位移,合称【位姿】
总结:
1. P在相机坐标系下坐标(X,Y,Z),每个P点的Z其实都是一样的,因为都在一个平面上
2. 仅仅凭借一张照片(u,v)、K、R、t, 依然是缺少了Z值,根据式子,也没办法得到Pw

镜头畸变
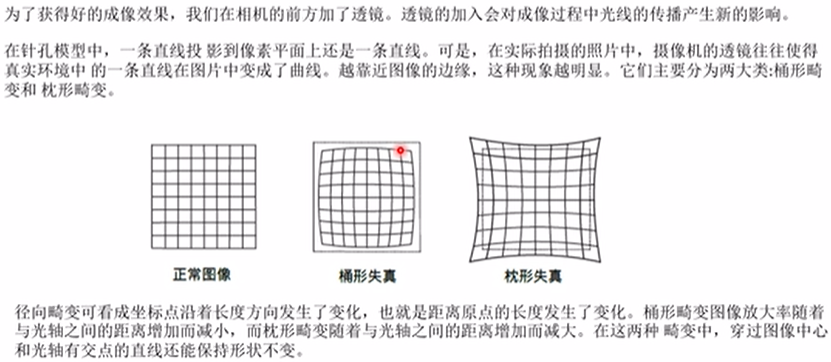
假设P点在像面上,以光心垂直投影为原点,其坐标为x,y , 写成极坐标,为(θ, r)
径向畸变模型:

切向畸变模型:
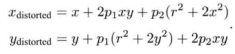
综合起来:
![]()
问题:
1. 如何求k1\k2\p1\p2
2. 猜想:
1. 使用已知x,y的点,例如十字标靶,但是要归一化,变成相机坐标系下x,y
2. 拿这些点最小二乘解得参数
nm

 浙公网安备 33010602011771号
浙公网安备 33010602011771号