OpenCv:边缘处理&Canny边缘检测
卷积边缘:
一、在进行卷积的时候,对于原图像(1,1)的位置,左、上方没有足够的像素做卷积。
二、通常,在卷积之前,在原图增加边缘像素,比如(3*3的,增加一个像素)
三、增加像素值得处理方法,通常有:
(一)BORDER_DEFAULT。默认
(二)BORDER_CONSTANT。使用固定的值。
(三)BORDER_REPLICATE。使用已知边缘的像素值。
(四)BORDER_WRAP。用另一边的像素值来补偿填充。
四、API
copyMakeBorder( Mat src, Mat dst, int top,//边缘宽度,一般上下左右都一样 int bottom, int left, int right, int borderType,//类型 Scalar value //颜色限制 )
五、例子
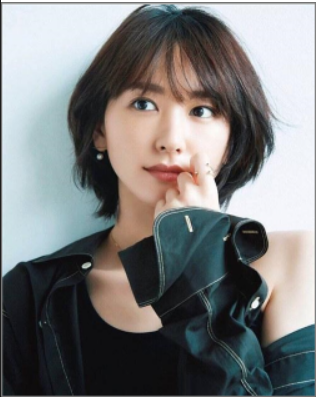
原图
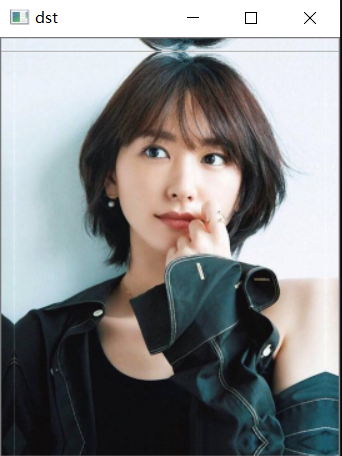
BORDER_DEFAULT
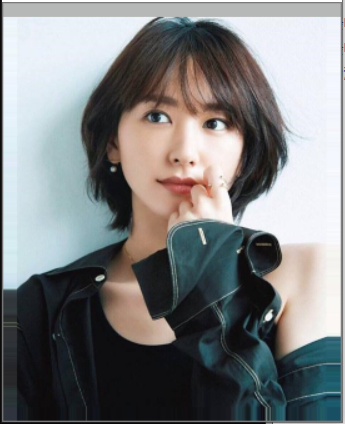
BORDER_REPLICATE
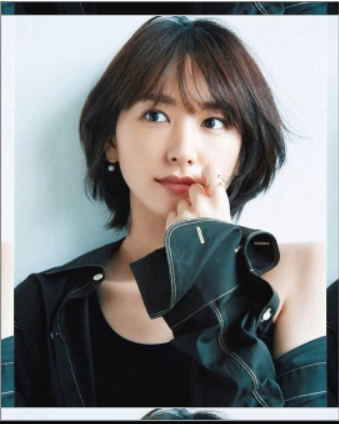
BORDER_WRAP
Canny边缘检测
一、算法介绍
(一)高斯模糊——GaussianBlur。就是对图像进行降噪。
(二)灰度转换——cvtColor。
(三)计算梯度——Sobel/Scharr。得到 |X| + |Y|。
(四)非最大信号抑制。由于Sobel后,边沿非常强(粗),甚至起“皱褶”。因此要处理。
(五)高低阈值输出二值图像。
二、详细介绍
(一)梯度。Sobel

Gx:将kernel内,水平方向的所有变化量,全部集中在【锚点】处,而且【锚点】同行,还*2,突出其权重。
G如果大于某个阈值,那么此位置就可能是边缘了。
G通常用G = |Gx| +|Gy|
(二)非最大信号抑制。
1、梯度方向。在哪个方向变化最大。
θ在0~180度之间
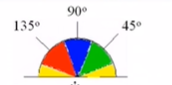
2、抑制。
(1)找到θ
(2)比如θ=90度,找到90±45度的像素(左上、右上)
(3)如果像素值,大于左上、右上,那么保留。否则舍弃。
(三)高低阈值输出二值图像。
1、定义2个阈值:高值T1、低值T2。
2、大于T1,保留;小于T2,丢弃。
3、从高于T1的像素开始寻找,大于T2且相互链接的,都保留。
4、推荐T1:T2 = 3:1,或者2:1。
三、API介绍
Canny( Mat src, //8-bit(位)的灰度图 Mat dst, double T2, //低阈值,此值越高,得到的边缘越少,最终只留最强的边缘 double T1, //高阈值,通常为255 int aptertureSize,//Soble算子的Size,通常3*3的,所以这里填3 bool L2gradient //true表示是L2来归一化,否则用L1归一化,一般为false ) //L2gradient ,使用L2,则用G = sqrt(gx*gx + gy* gy)来求梯度,否则用 //G = |gx| + |gy|来近似
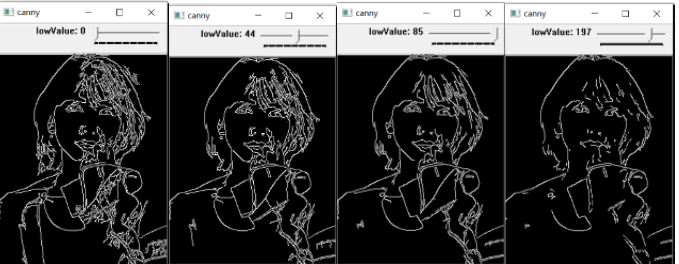
四、例子
Mat gaussianBlur, gray, canny; cvtColor(src, gray, COLOR_BGR2GRAY); Canny(gray, canny, 85, 255, 3); imshow("canny", canny);
随着低阈值的变化,而变化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号