测绘线性代数(三):伪逆解
原来的说法:

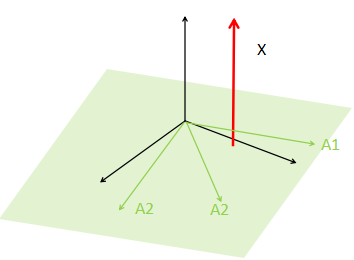
向量V的各个分量,对A的列向量进行线性组合。
V' = x i + y j
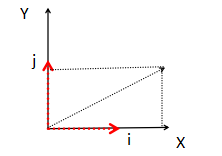
通常,要知道V' 的大小和方向,首先是将i , j 绘制出来,然后用V各个分量对其线性组合。
如果i⊥j ,而且| i | = | j | =1, 如果以 i 和 j 为坐标轴,那么V' 就是V在以i和j为坐标轴下的坐标。
假如,i 和 j 恰好是X轴和Y轴的方向,那么V' = V , V没有改变(长度,方向都和前后一样)
i和j 将视为坐标系下的一个基
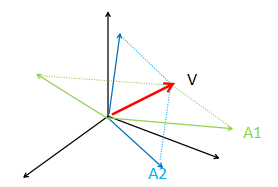
(此处,开始将A看成是作用于V的一个变换,可记为V' = AV = T(V))
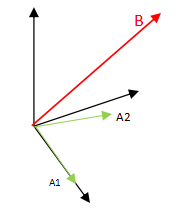
假如有一个矩阵B,将i变换成i' ,将j变换成 j' , 那么B对V' 变换为V'' 应该是如何的?
V'' = BV' = B(x * i + y * j) = x B i + yB j = x i' + y j' = [ i' , j' ] V
为什么说标准正交矩阵如此重要,因为其相当于 i' ⊥ j' , | i' | = | j' | =1 , 仅仅对V旋转成V''
B对V'的变换,相对于B先对V的基变换成新的基, 再由V来对新的基线性组合。
逆矩阵,就是线性变换后的结果V' = AV,然后V = A-1V' , 将V' 变回V,也就是:V = A-1AV
但是,A不是什么情况下都有逆。
首先,有线性变换的性质可知,由于A的各列,是V在新坐标系下的各个坐标轴;如果A各列向量长度恰好为1,而且正交,那么将会将V,映射为另一个坐标系下的向量V' , 长度和V一样,方向和V不同。
因此,有两个结论:
1. A要是方阵,因为A-1 是一个变换还原的问题。
如果A不是方阵,那么有许多AV=A1V=A2V=……=V' , 反正从V对A各列线性组合来看,组成V'可以有很多种。
另一个方面,如果A不是方阵,那么V的维数只能“平面” 。
2. A各列必须线性无关。
如果A各列线性相关,那么同样的,有许多AV=A1V=A2V=……=V',从而,将V' 变换回来,有很多Ai-1 (假如有)
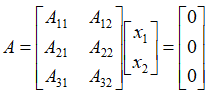
另一个方面,有方程组:
a11 v1 + a12 v2 + a13 v3 = v1' (1)
a21 v1 + a22 v2 + a23 v3 = v2' (2)
a31 v1 + a32 v2 + a33 v3 = v3' (3)
在解这个方程组的时候,传统办法是“高斯消元法”,就是(1)、(2)、(3)式乘以倍数后相减,将原来的AV = V' ,变成 I V = V‘’,那么V就可以解出来,结果V不变。
如果有矩阵[A I],经过“高斯消元法”,得到[ I E]
如果有:A[I E] = [A I] = [ AI, AE] ,也就是I = AE,E = A-1
那么,A必须能够完成整个“高斯消元法”,才能由A变成I 。
要完成消元法,那必须A各行线性独立
对于方阵而言,行线性独立,等价于列线性独立,因为只是坐标系“翻转” 一下而已。
符合AX=0的所有X,称为A的零空间,又叫:N(A)
假如:A是3x2(mxn)的矩阵,
X垂直于A的每个行向量
如果A的2个行向量线性无关,那么A的秩R = 2 ,其行空间的维度也是2,所有X形成的空间,维度是m - R = 1
所以,X空间的维度N(A) = m - R
在前面提及,有情况:
A列向量线性无关,B不在列空间中
这时,只要Ax=B,左右两边乘以AT , 得到ATAx=ATB,解此方程,即可获得最小二乘解。
x = (ATA)-1 ATB,ATA有没有逆矩阵?其答案等价于:A是否“满秩”
假设有ATAy = C = 0
那么:yTC = yTATAy = 0
等价于:||Ay||2 = 0
等价于:Ay = 0;
所以,对于同一个向量y , y 垂直于A和 ATA 的行空间。
所以A和 ATA 的行空间应该是一样的。行空间的维度(是二维平面还是三维空间) = 秩数
从而,导致R(A) = R(ATA) = n,也即是ATA作为nxn矩阵,满秩,固可逆。
但是,通常,我们解ATAx=ATB,并不会求(ATA)-1 ,因为求逆的代价通常很大的。
如果我们采用上述的“高斯消元法”,将方程组ATAx=ATB 理解为,另一个Ax = y 。那么,得到:
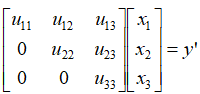
结果,先解出x3 ,然后回代,解出x2 ,x1
但是,应该如何记录,“高斯消元法”的各个步骤呢?答案是,左乘一个矩阵。
例如,有矩阵:
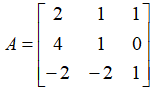
按照“高斯消元法”,第一步,消去第2行第1列的元素。那么,可以左乘一个矩阵E21
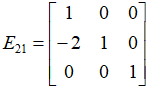
分析E21 :
第1行表示,1*A的第1行 + 0*A的第2行 + 0*A的第3行 = E21 的第1行
第2行表示,-2*A的第1行 + 1*A的第2行 + 0*A的第3行 = E21 的第2行 , 正好消除了A的第2行第1列的元素
..
假如,A‘ = E21A
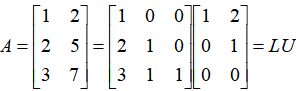
那么,最终,U = A''' = E32E31E21A
对于各个E,一定是有逆矩阵的(既然可以将A逐步变成U,那么也可以将U逐步变回A)
所以,A = (E21)-1(E31)-1 (E32)-1U = LU
(由此可见,A需要时满秩矩阵,假如第1行和第2行线性相关,那么乘以E21 ,直接就会将第2行元素全部变成0,导致无法回代了)
上述又叫LU分解,当然,A不止一种分解方式。 OK,矩阵分解的序幕要拉开了。
开一下脑洞:
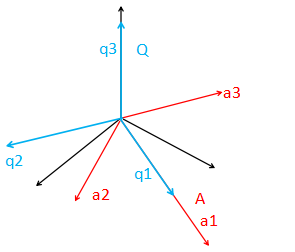
假如有A,有Q,Q的各列向量相互垂直,而且长度都为1,是否可以考虑,有
a1 = i q1
a2 = j q1 + k q2
a3 = l q1 + mq2 + n q3
也就是
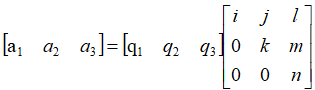
亦即A=QR,又叫QR分解
那R阵,i……n到底是怎么来的呢?Q阵,q1 , q2 , q3 是怎么来的?其实很好分析:
(1) q1 肯定是和a1同向的,而且长度为1,那么 q1 = a1 / ||a1|| , i = ||a1||
(2) 由于q2⊥a1,那么只要a2减去在a1上的分量,得到q2',然后q2=q2' / ||q2'|| 即可。
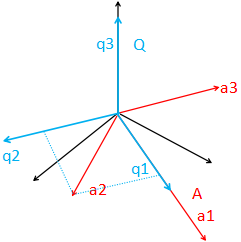
那么,a2如何减去在a1上的分量呢?很明显,也就是,q2' = a2 - (a2在a1上的投影向量)
一个向量,在另一个向量中的投影如何求?
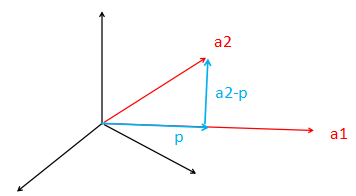
p = x a1,a2 - p ⊥ p ,所以 pT(a2-p)=0
pTa2 = pTp
x a1T a2 = x2 a1Ta1
a1T a2 = xa1Ta1,而因为a1Ta1是常数,等于||a1||2
x = a1T a2 / a1Ta1
所以a2在a1的投影公式:
![]()
(3) 同理,q3' = a3 - (a3在q1的投影) - (a3在q2的投影)
这种办法,又叫Gram-Schmidt正交化过程。
*由于Q是标准正交方阵,所以QTQ=I(对角线就是单位向量的长度平方 =1,非对角线是正交向量的点积=0),对于列向量无关的最小二乘解:ATAx=ATb,x=(ATA)-1ATb , 有:
x = (RTQTQR)-1RTQTb,从而,x = (RTR)-1RTQTb = R-1QTb
所以,Rx = QTb , 由于R是下三角阵,又可以愉快的回代,直接得出x了。
是时候,要考虑:
A列向量线性相关,而且B也不在A的列空间中
我们的求法,当然是要B投影在A的列空间中,然后找出||X||最小的一组解。
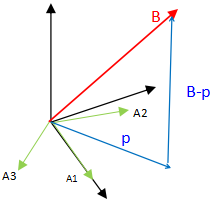
B应该如何投影在列空间中的呢?
p⊥(B-p) ,所以,pT(B-p) = 0。有 p = AX(p可以由A各列线性组合得到),所以:
(AX)TB = (AX)T(AX)
XTATB=XTATAX
ATB=ATAX
又被难住了,当A列线性无关是,ATA才有逆,p = AX = A (ATA)-1ATB (因此,矩阵P = A (ATA)-1AT 又叫投影矩阵)
那还有什么办法呢?那不找投影了,直接找||X||最小的一组解。
首先,A的行空间 ⊥ A的零空间 (上面已经说明了),那么,可以说明,X在n维空间中,总可以分解为:X = X在行空间的部分 + X在零空间的部分。
(为了好记住,称X = Xr + Xw)
(1) p = AX = A(Xr + Xw) ,又因为Xw在A的零空间,所以AXw=0,因此:p = AXr,所以Xr可以说是其中一个解。
(2) 那么,X在n维空间中,其Xr分量的长度是固定的,仅有Xw处不同。(这个也不知道如何解析,《线性代数及其应用》P150页提及过)
可能就是:AX=b是一个非齐次线性方程组,对于非齐次线性方程组的通解,就是AXw=0,Xw作为任意解,加上AXr=p作为一个特解;
也就是同解为:X= Xr + Xw,并且Xw是任意的,而Xr是固定的;
当||X||最小,证明X完全在行空间上,自然的Xw=0
(将X最小,转化为求X在行空间的分向量)
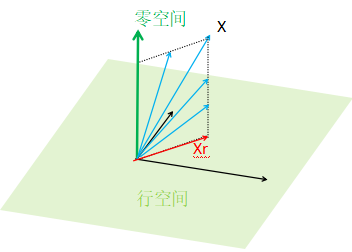
*如果列线性无关的话,可以想象,行空间一定沾满整个Rn;而且X只能在行空间中没法跑,长度固定唯一。
(3) 因此,Xr是最小范数解。
首先,得知道SVD分解:https://www.cnblogs.com/pylblog/p/10544427.html
X+ = A+b
A+ = VΣ+ UT
A+ 是A的“伪逆” ,X+ 又叫“伪逆解”
因为A+ A = VΣ+ UT UΣVT
而U和V是单位正交矩阵,所以UTU = I , VVT =I
而ΣΣ+ 是对角线为1或0的方阵,所以 A+ A 最终也是对角线为1或0的,类似于I的方阵(所以称为“伪”)。
那么,剩下只需验证:
一. X+ = A+b 是不是符合Xr的特征,也就是X+ 是不是在行空间中,从而证明X+ 的长度是最短的
二 . 前面说过,p = AX = Pb,p是b在A的列空间上的投影
首先,要介绍一种特殊的LU分解:
假如,将U的0行去掉,得到:
A依然还是A。只是U‘变得可逆了。
A+ 又可以表示为:A+ = U’T(U'U'T)-1(L'TL')-1L'T <=> A+ = VΣ+ UT (注意到此U非彼U), 因为 A+ A = A+ L'U' = I
现在,只要用新的A+ 来证明前面两个性质:
(1) 令A+ = U’T(U'U'T)-1(L'TL')-1L'T 等于 A+ = U’T C
(2) A+ b = U’T Cb = U’T y
而U‘ ,更具LU分解的特性,U’ 和 U有着相同的行空间,而U和A又有相同的行空间,所以U'和A有相同的行空间。
而U’T y 是对 U'T 列向量的线性组合。换句话说,就是对U' 行向量的线性组合。
结论是,A+ b = U’T y ,其结果是一个在A的行空间的向量
因此,X+ = A+b ,X+ 是在行空间中的。
(3) AX+ = AA+b = (L'U')(U’T(U'U'T)-1(L'TL')-1L'T b) = L'(L'TL')-1 L'T b
而L‘ 和A有相同的列空间,又L'(L'TL')-1 L'T 是一个投影矩阵,因此p = AX+ = Pb
验毕!
应用:
通常在平差中,有观测方程 v = Bx - l ,往往x是近似值X的改正数 , 最终要获得X’ = X + x
而我们要想 vT pv最小,就是假想 0 = Bx - l , x有解
从而解方程 BTpBx = BTpl , 令其为Ax =b
因为没有控制点,或者起算数据,所以造成A秩亏,常规办法,没法得到X‘
那么,用伪逆解,可以获得,使得近似值改正数xTx 最小,也就是改正数向量x最小的一组解。
换句话说,当近似值是相对坐标(因为没有已知点,或起算数据,只能这样),而且可以从高精度的观测数据推导时,那么解出x的意义是,让这个相对坐标更准确,也就是相互关系更准确!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号