最佳路径搜索算法1
算法,就是(结合各种数学知识)解决问题的有限步骤,可以表现为程序、流程图。
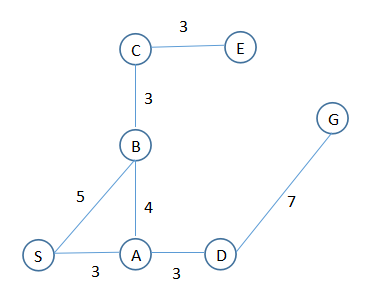
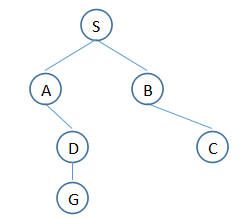
假设要寻找一条路径,从起点S,终点G。
有几个关键原则:
1. 路径的下一个节点,不能和以往节点相同,否则会造成死循环。
2. 所有“待选”,“待算”路径,放在一个列表中;
OK,现在可以假设,有基础数据,各个点的坐标:
struct Point {
char ID;
double x;
double y;
}
各个可走路径的长度
struct distance
{
char Id1;
char id2;
double lenght;
}
那么,我们想要的结果,是:
struct Path {
List<int> Ids; //一个有序的节点集合
}
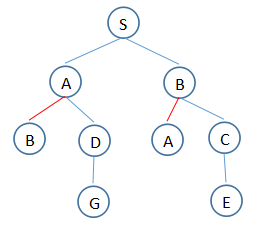
british museum算法
这个算法,说白了就是构造一颗树,没什么目的的构造,造到死胡同为止,最后看看那条包含S和G
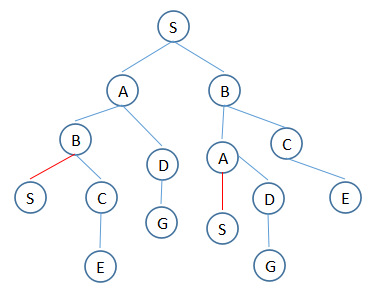
要实现这个算法,需要两个列表,一个存放所有走到死胡同的路径R,一个存放还没走到死胡同的路径T。
被划去的路径,例如:在上一步演变到下一步中划去的。
算法开始:
1. T:(S) R:空
2. T:(S,A),(S,B) R:空
3. T:(S,A,B),(S,A,D),(S,B) R:空
4. T:(S,A,B,C),(S,A,D),(S,B) R:空
5. T:(S,A,B,C,E),(S,A,D),(S,B) R:空
6. T:(S,A,D,G),(S,B) R:(S,A,B,C,E)
7. T:(S,B,A),(S,B,C) R:(S,A,B,C,E),(S,A,D,G)
8. T:(S,B,A,D),(S,B,C) R:(S,A,B,C,E),(S,A,D,G)
9. T:(S,B,A,D,G),(S,B,C) R:(S,A,B,C,E),(S,A,D,G)
10. T:(S,B,C,E) R:(S,A,B,C,E),(S,A,D,G),(S,B,A,D,G)
11. T:空 R:(S,A,B,C,E),(S,A,D,G),(S,B,A,D,G),(S,B,C,E)
12. 看看R中那条路径含有S和G,S到G的距离那条最短即可。
伪代码:
while(T.Count > 0)
{
if ( T[0]的最后一个节点不是G && 能T[0]的下一个节点 的数目n > 0 )
复制n个T[0],然后分别往后边添加可添加的节点;
移除T的第0个元素;
将新的n个队列插入到T的前面;
else
将T的第0个元素放进R;
移除T的第0个元素;
}
deepth first(深度优先)算法
和british museum算法不同的地方是:1. 不需要结果列表;2. 发现目标马上停下来;3. 有回溯
缺点:不能总是发现最优路径
1. T:(S)
2. T:(S,A),(S,B)
3. T:(S,A,B),(S,A,D),(S,B)
4. T:(S,A,B,C),(S,A,D),(S,B)
5. T:(S,A,B,C,E),(S,A,D),(S,B)
6. T:(S,A,D,G),(S,B)
伪代码:
while(T.Count>0)
{
if ( 能T[0]的下一个节点 的数目n > 0 )
if (能加在T[0]后的节点有G)
返回T[0] + G的路径
else
复制n个T[0],然后分别往后边添加可添加的节点;
移除T的第0个元素
将新的n个队列插入到T的前面(这个是算法最要特点)
else
移除T的第0个元素
}
breadth first(广度优先)算法
和british museum算法不同的地方是:1. 实现上将扩展后的路径,放到列表后边;2. 没回溯
比深度优先的优点是,更早发现路径浅的路线,虽然本例子是同一个,但难保“右”边出现G比较快。
缺点:较“浅”的不一定是路径最短的。
1. T:(S)
2. T:(S,A),(S,B)
3. T:(S,B),(S,A,B),(S,A,D)
4. T:(S,A,B),(S,A,D),(S,B,A), (S,B,C)
5. T:(S,A,D),(S,B,A), (S,B,C),(S,A,B,C)
6. T:(S,B,A), (S,B,C),(S,A,B,C),(S,A,D,G)
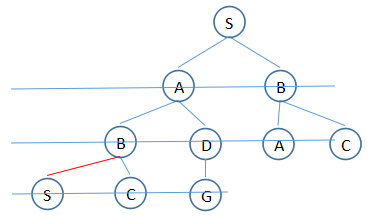
breadth first(广度优先)算法的优化
以上,无论哪个算法,都会对同一节点考虑多次,例如:
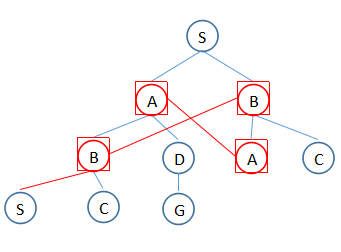
那么,优化的地方是,考虑过的节点不再考虑,变为:
1. T:(S)
2. T:(S,A),(S,B)
3. T:(S,B),(S,A,D)
4. T:(S,A,D), (S,B,C)
5. T:(S,B,C),(S,A,D,G)
在实现上,对比广度算法,只需要在添加到列表后边前,去除部分不再考虑的节点。
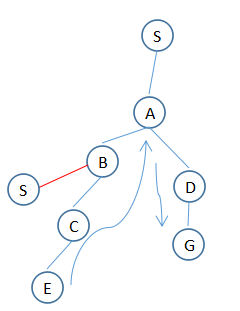
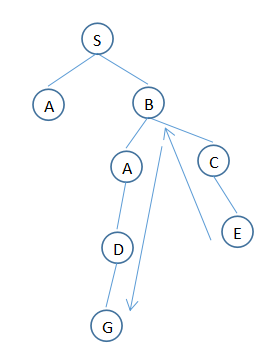
hill climing算法:在深度优先的基础上改进
有不断扩展节点,回溯,使用启发信息的特点
特点:在深度优先的基础上,只考虑离目标直线距离最近的节点。
区别: 在将新的路线插入队列前,先根据离目标的距离,按升序排列。
缺点:这种是一种比较“短视”的算法。
优点:如果路网太复杂的话,效果可能更好
1. T:(S)
2. T:(S,B),(S,A) (这里发生了排序)
3. T:(S,B,C),(S,B,A),(S,A) (这里发生了排序)
4. T:(S,B,C,E),(S,B,A),(S,A)
5. T:(S,B,A,D),(S,A)
6. T:(S,B,A,D,G),(S,A)
束搜索:广度优先的改良,使用“知情启发信息”
区别:1. 在广度优先中,限制每一层中考虑的路径数量w;2. 节点重复的不考虑;3. 将距离教小的值放到队列前面
关键:设置好w值
1. T:(S)
2. T:(S,B) ,(S,A) //B点比A点近
3. T:(S,A),(S,B,C)
4. T:(S,B,C),(S,A,D)
5. T:(S,A,D) ,(S,B,C,E)
6. T:(S,A,D,G)
伪代码:
while(T.Count>0)
{
if ( 能T[0]的下一个节点 的数目n > 0 )
if (能加在T[0]后的节点有G)
返回T[0] + G的路径;
else
移除n个节点中,在路径已经出现过节点
复制 ≤ n个T[0],然后分别往后边添加可添加的节点;
移除T的第0个元素;
对 ≤ n个T[0]延伸路径,根据最后一个节点对G点的距离,按升序排列,并取前w个T[0]的延伸路径;(这个是算法主要特点)
将新w个T[0]的延伸路径插入到T的后面(这个是算法主要特点)
else
移除T的第0个元素
}
| 搜索办法 | 回溯 | 节点扩展 | 使用启发式信息 | 扩展路径插入方式 |
| british museum | false | false | false | |
| 深度优先(deepth first) | true | true | false | 前 |
| 广度优先(breath first) | false | true | false | 后 |
| 爬山算法(hill climing) | true | true | true | 前 |
| 束搜素 | false | false | true | 后 |
*节点扩展,在实现上,将新的扩展路径加入到队列的前面;思想上,是否对新的扩展路径“一路走到黑”
*回溯,在实现上,将新的扩展路径加入到队列的前面;新的路径走到死胡同后,及时丢弃;
*启发式信息,是否使用坐标值来优化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号