
百度Apollo Day
1、地图篇
1.1、汽车上地图变迁
地图核心要素的地图的精度和要素的丰富度
汽车智能化驱动汽车上地图变迁,汽车上地图主要经历下面几个阶段:
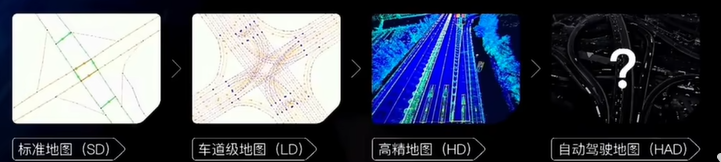
SD地图/标准地图:精度15米左右,道路拓扑组成,主要用于导航
LD地图/车道级地图: 精度亚米级,加入了道路级拓扑信息,主要用于辅助驾驶
HD地图/高精地图:精度厘米级,加入几何语音信息,主要用于自动驾驶
HAD地图/自动驾驶地图:精度更高,更丰富更高精度的拓扑,几何语义等信息,以及更加符合自动驾驶所需要的信息?下面会讲

 浙公网安备 33010602011771号
浙公网安备 33010602011771号