Evaluation of CNN-based Single-Image Depth Estimation Methods
常用的基线RGBD数据集
1、Make3D 534张户外图和定制三维扫描仪扫描出来的深度图,缺点是: 场景不丰富,深度图分辨率低
2、Kitti 车捕捉的街景,RGB图+激光扫描器扫出来的深度图,缺点是: 深度图分辨率低,且深度图间隔无规则且稀疏
3、NYU depth v2 使用较多,464张室内场景训练+654做评估,RGB+ Microsoft Kinect v1 sensor获得的深度图
4、Kinect 有效距离范围很小,遮挡、边界等不够清晰
5、Matterport3D 使用较多,室内场景,由三个RGB-D摄像机组成的定制3D扫描仪,缺点活动RDB-D传感器 suffers from the same weaknesses of active RGB-D sensors.
误差度量
现有的Error:
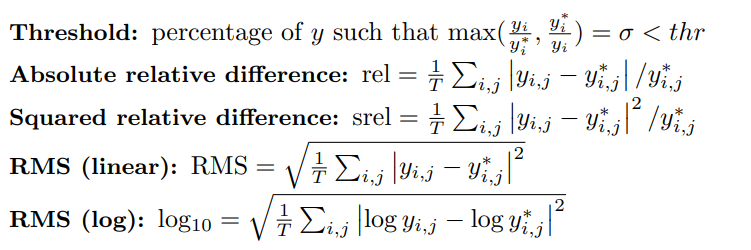
这些度量方式都是全剧深度差异的统计,只关注了全局的一致性,不能评估平面的平整性和三维的方向,以及边界和遮挡情况
1、Distance-Related Assessment: 按照不同深度区间分别统计预测正确性
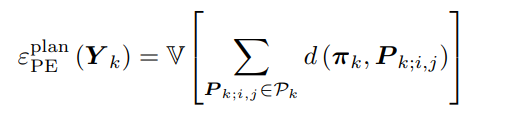
2、Planarity:
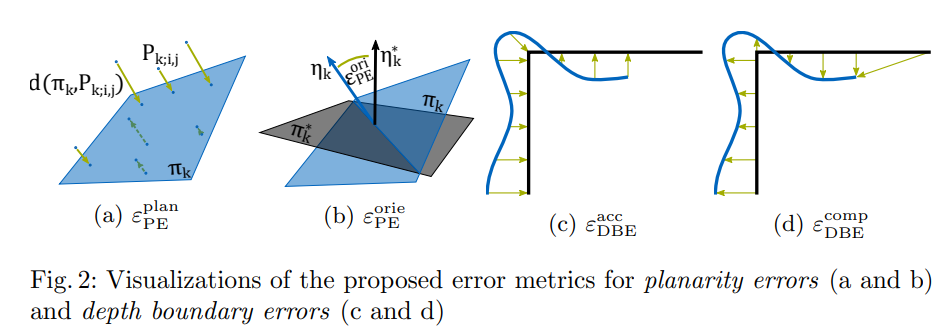
planarity error计算了(mask得到的)某一特定平面预测得到的三维points与实际的偏差;
orientation error计算了预测平面与实际平面的角度偏差,角度通过反余弦函数得到,arccos函数可以根据函数值求出弧度值。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号