结对项目作业
| 项目 | 内容 |
|---|---|
| 这个作业属于哪个课程 | 班级博客 |
| 这个作业的要求在哪里 | 作业要求 |
| 我在这个课程的目标是 | 学好并应用好软件工程 |
| 这个作业在哪个具体方面帮助我实现目标 | 学习结对编程 |
| 项目地址 | 使用队友仓库:https://github.com/Reliacrt/INTERSECTION_GUI/ |
| 作业正文 | 如下 |
看教科书和其它资料中关于 Information Hiding,Interface Design,Loose Coupling 的章节,说明你们在结对编程中是如何利用这些方法对接口进行设计的。
信息隐藏:
计算模块中暴露给其他模块的只有add_shape(line)、delete_shape(line)、get_shapelist()、intersect(Shape* ano)四个函数,其他模块不能调用其他函数,抛出异常、点的计算均只在计算模块可见;
接口设计:
为了能适应gui,设计了增加几何对象add_shape(line)、删除几何对象delete_shape(line)、获得已有几何对象集合get_shapelist()三个接口,intersect(Shape* ano)暴露给其他模块为了求交点;
松耦合:
其他模块只需提供输入即可在计算模块计算出所有交点。
计算模块接口的设计与实现过程。设计包括代码如何组织,比如会有几个类,几个函数,他们之间关系如何,关键函数是否需要画出流程图?说明你的算法的关键(不必列出源代码),以及独到之处。
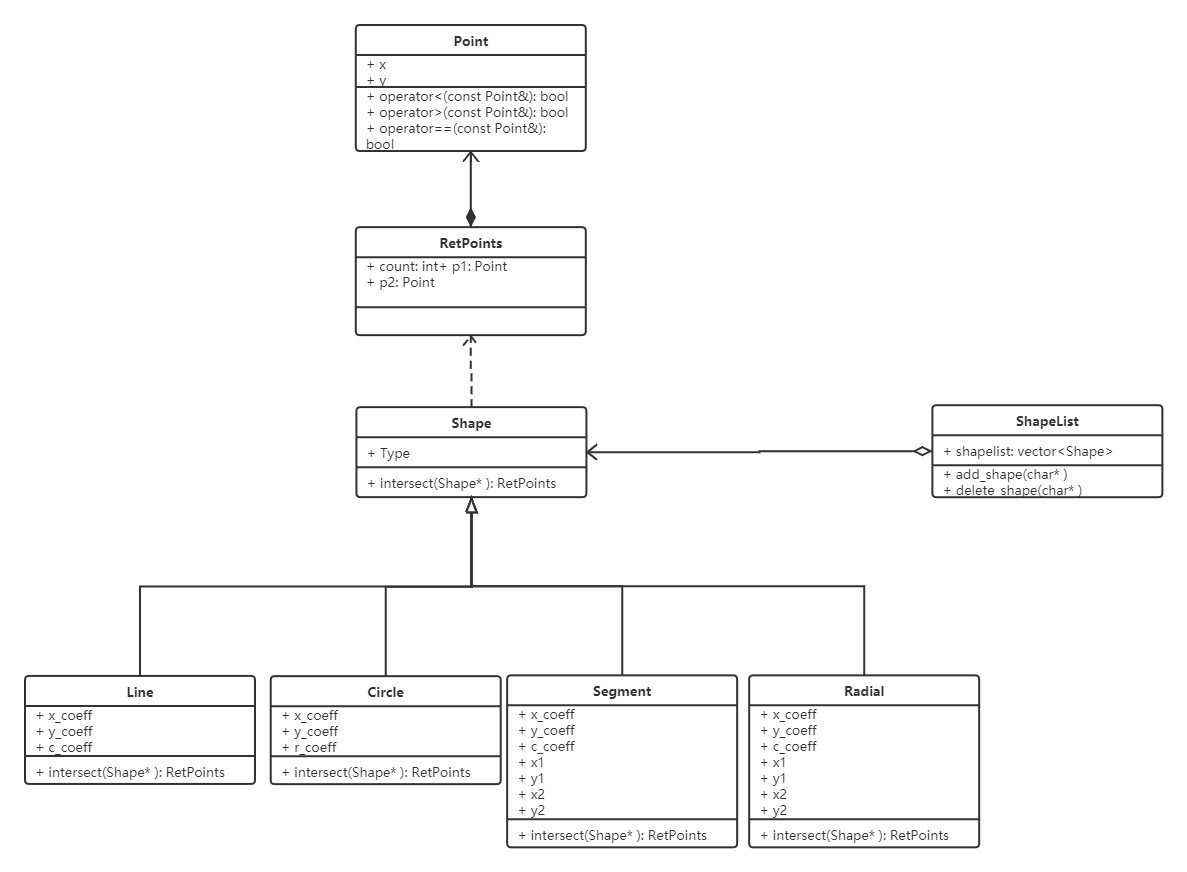
类:
一个抽象类(Shape),四个子类(Line、Circle、Segment、Radial,分别记录四种图形的信息),
Point类(记录交点信息),RetPoints类(记录两个图形交点信息,可能0、1、2个点),ShapeList类(用于异常处理);
函数:
三个主要函数(用于求直线与直线、直线与圆、圆与圆的交点)
inline RetPoints line_inter_line(Shape* s1, Shape* s2);
inline RetPoints line_inter_circle(Shape* s1, Shape* s2);
inline RetPoints circle_inter_circle(Shape* s1, Shape* s2);
判断函数(判断交点是否在射线或直线上,如果不在的话就删除)
inline RetPoints segment_constraint(Shape* s, RetPoints orig);
inline RetPoints radial_constraint(Shape* s, RetPoints orig);
inline bool on_radial(Point p, Shape* s);
inline bool on_segment(Point p, Shape* s);
与异常处理相关的函数:
void add_shape(char* line);
void delete_shape(char* line);
inline char* decide_char(char* s, char* c);
inline char* decide_int(char* s);
inline void decide_more(char* s);
add_shape函数是与外界的接口,传进输入(例如“C 1 1 1”),然后通过decide_char、decide_int、decide_more判断输入是否异常;
delete_shape函数用于GUI模块删除某个几何对象,并且判断异常(没有被删除的对象);
接口:
RetPoints intersect(Shape* ano);
vector<Shape*> get_shapelist();
get_shapelist用于传出向量(所有new的对象(Line、Circle、Segment、Radial));
四个类(Line、Circle、Segment、Radial)都有成员函数RetPoints intersect(Shape* ano),外部通过该函数来求两两几何对象的交点,外部可以通过set(去重)来存储交点信息。
关键函数流程图:
函数不复杂,可用文字表达:
三个主要函数(用于求直线与直线、直线与圆、圆与圆的交点)用公式求交点即可;void add_shape(char* line)函数对line先判断格式(字符 数字 数字 ...),格式不对抛出异常,然后new相应的对象,与已有的几何对象比较,如果重合抛出异常,否则将该对象加入shapelist中;
算法的关键:
关键在于求两个几何对象的交点(特别是如果两条线段位于一条直线上,这两条线段可能不相交,即没有无穷多个交点,不用抛出异常);
算法的独到之处:
线段、射线可以看成直线,只需计算交点后判断交点是否位于线段或者射线之上即可,double的比较(eps)。
阅读有关 UML 的内容:https://en.wikipedia.org/wiki/Unified_Modeling_Language。画出 UML 图显示计算模块部分各个实体之间的关系(画一个图即可)。
计算模块接口部分的性能改进。记录在改进计算模块性能上所花费的时间,描述你改进的思路,并展示一张性能分析图(由VS 2015/2017的性能分析工具自动生成),并展示你程序中消耗最大的函数。

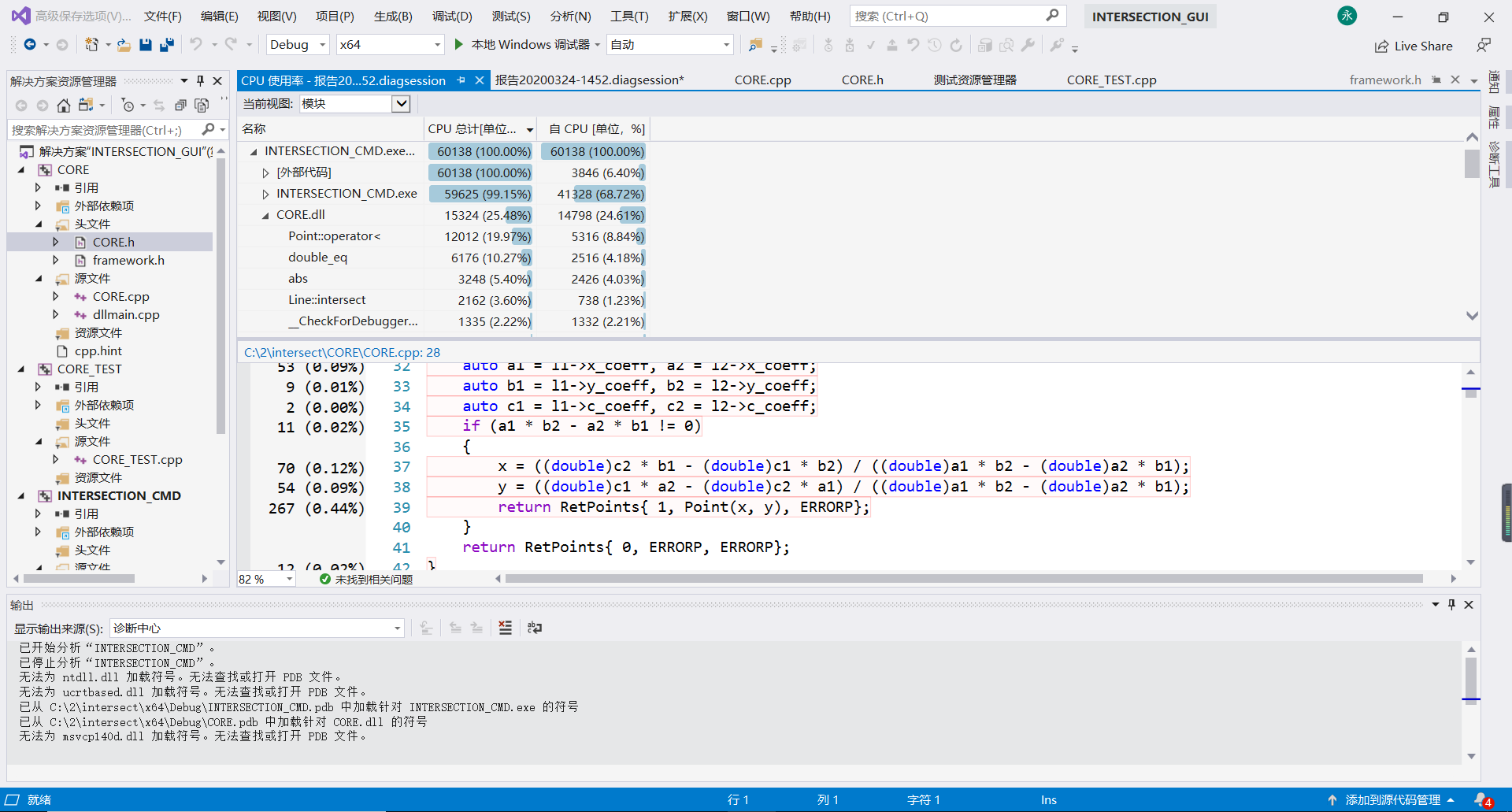
在改进计算模块性能上花费60min;
改进思路:
改进之前两个几何对象的交点信息用vector记录,发现比较浪费时间和空间(最多两个交点),改建一个新类RetPoints来记录信息、改进之前判断两线是否重合通过化简A、B、C(求最大公因子),然后比较是否相等,改进之后可以直接取一条直线上的两点带入另一条线判断即可。
性能消耗最大的函数:

看 Design by Contract,Code Contract 的内容,描述这些做法的优缺点,说明你是如何把它们融入结对作业中的。
Design by Contract:
优点:获得更加优秀的设计,不会盲目、更清楚、更简单,更容易阅读、理解、找错,减少犯错,可靠性更高;
缺点:需要时间来理解、需要时间来实践;
Code Contract :
优点:通过代码契约可以规范代码,同时符合契约的代码可以使用现有工具来进行检查正确性、生成等;
缺点:理解契约需要花费时间、写代码受到限制,限制还没有很多软件支持契约;
如何融入结对作业中:单元测试中使用断言,为了程序的可靠性、健壮性,对可能情况抛出异常,一个类、方法尽可能只解决一个任务。
计算模块部分单元测试展示。展示出项目部分单元测试代码,并说明测试的函数,构造测试数据的思路。并将单元测试得到的测试覆盖率截图,发表在博客中。要求总体覆盖率到 90% 以上,否则单元测试部分视作无效。
计算模块为CORE.cpp
覆盖率:
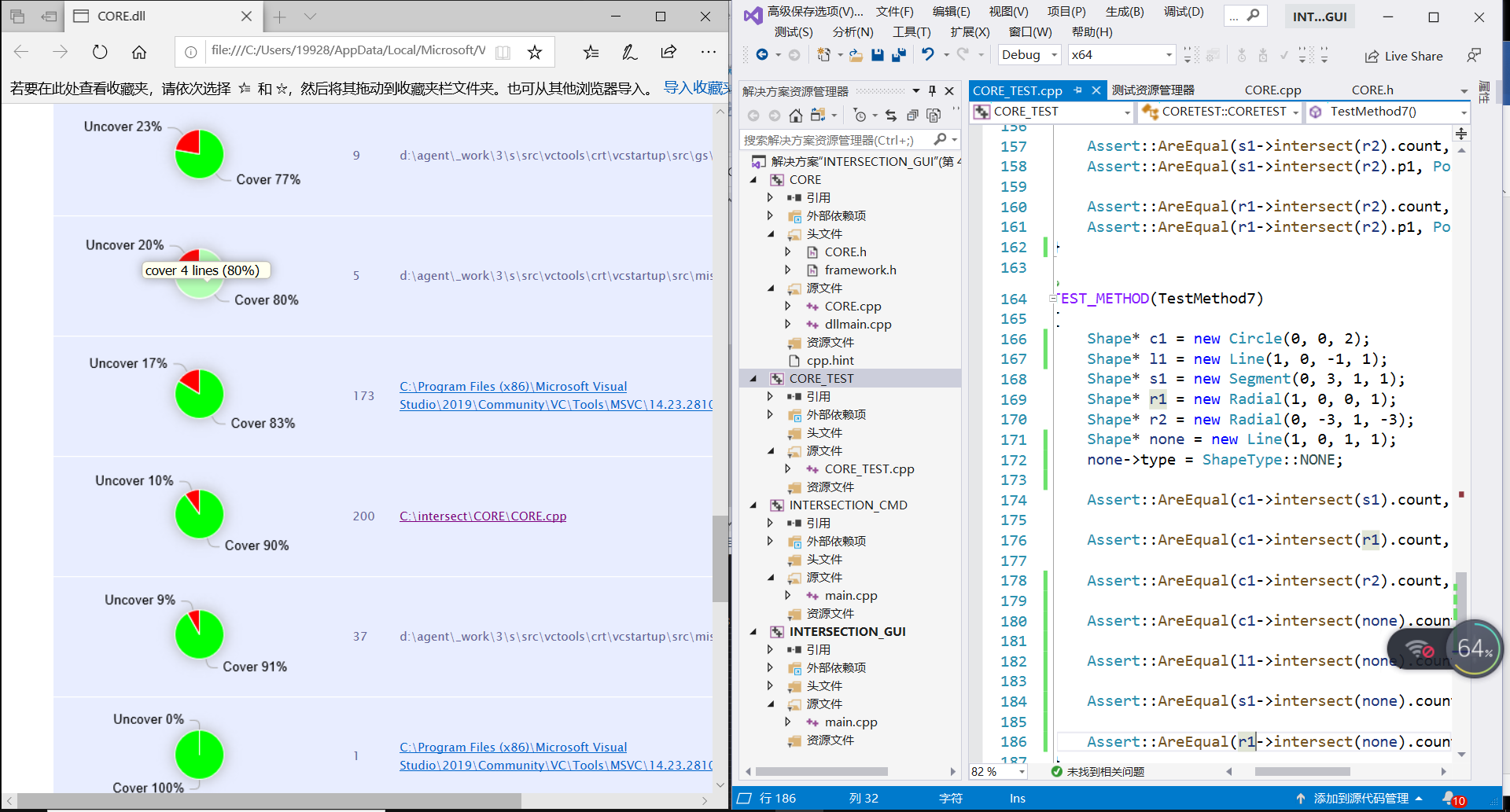
测试函数:
测试的函数主要是RetPoints intersect(Shape* ano)函数(求两个几何对象交点)
单元测试代码:
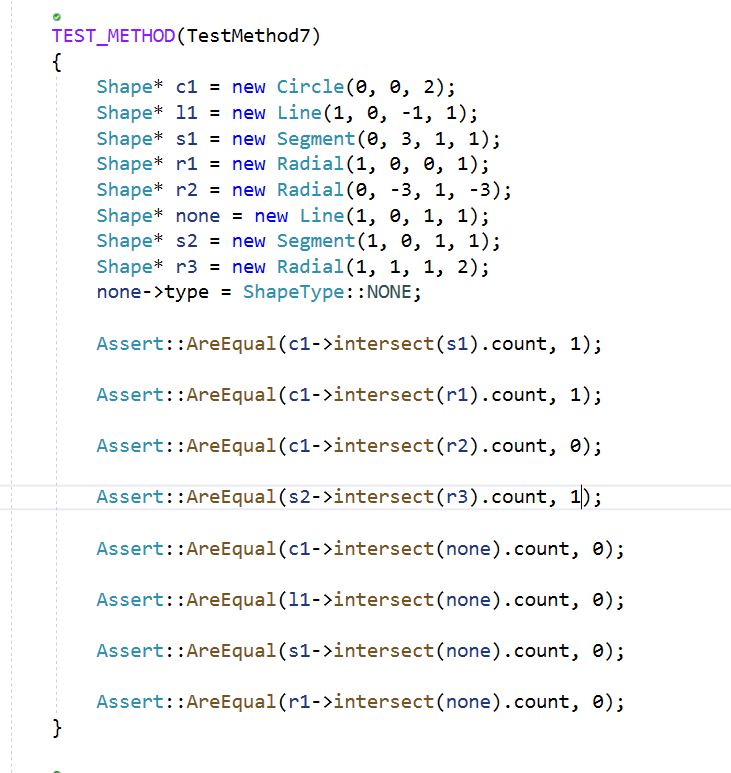
测试数据思路:
每种几何对象均涉及到,测试中间结果(两个几何对象交点个数和坐标),测试极端情况(两条线段、射线(在一条直线上)的交点),测试斜率无穷大,斜率为0,与圆相切,测试线段在圆中间等等。
计算模块部分异常处理说明。在博客中详细介绍每种异常的设计目标。每种异常都要选择一个单元测试样例发布在博客中,并指明错误对应的场景。
| 序列号 | 异常 | 目标 | 单元测试样例 | 说明 |
|---|---|---|---|---|
| 1 | Input char does not conform to four formats | 避免出现输入格式错误 | shapelist->add_shape("E 1 1 1"); | 没有E这种格式 |
| 2 | Fewer inputs | 确保输入数字数目符合要求 | shapelist->add_shape("C 1 1"); | 输入数字太少 |
| 3 | Leading 0 | 避免数字出现前导0 | shapelist->add_shape("C 1 1 001"); | 输入数字有前导0 |
| 4 | The input number does not meet the requirements | 确保数字符合要求(范围、不会出现其他字符...) | shapelist->add_shape("C 1 1 10000000"); | 输入数字不符合要求 |
| 5 | More inputs | 确保输入数字数目符合要求 | shapelist->add_shape("C 1 1 1 1"); | 输入数字太多 |
| 6 | Two point superposition | 避免输入线的两点重合,无法计算 | shapelist->add_shape("L 1 1 1 1"); | 输入两点重合 |
| 7 | Circle radius is 0 | 避免圆的半径为0,无法计算 | shapelist->add_shape("C 1 1 0"); | 圆半径为0 |
| 8 | Infinite intersections | 避免出现无穷多个点,程序不会终止 | shapelist->add_shape("C 1 1 1"); shapelist->add_shape("C 1 1 1"); | 无穷多个交点 |
| 9 | Deleted element is empty | GUI模块删除对象时当前平面上有该对象 | shapelist->delete_shape("C 1 1 1"); | 没有删除对象 |

界面模块的详细设计过程。在博客中详细介绍界面模块是如何设计的,并写一些必要的代码说明解释实现过程。
控件
- 输入文本框
- Insert按钮
- Delete按钮
- 绘图区
回调函数
- text_cb: 保存输入数据的指针
- bt_insert_cb: 向ShapeList中插入图形,若出错打印错误信息
- bt_delete_cb: 从ShapeList中删除图形,若出错打印错误信息
- update_canvas: 绘图区重绘函数
绘图(即update_canvas函数)
- 初始化绘图区;
- 绘制x、y轴;
- 遍历Shape的数组,绘制每个Shape
- 坐标转换
- 绘制图形
- 遍历Point的数组,绘制每个交点
- 坐标转换
- 绘制图形
坐标转换
// unit求解每单位坐标的像素数
inline double unit(int w, int h, double mx, double my)
{
// w: width
// h: height
// mx: 最大绘制图形的横坐标
// my: 最大绘制图形的纵坐标
double xu = (w / 2.0) / (mx + 5);
double yu = (h / 2.0) / (my + 5);
return xu < yu ? xu : yu;
}
// trans转换图形的坐标到canvas的坐标
inline double trans(double x, int w, double un)
{
// x: x或y坐标
// w: 宽度或高度
// un: unit
return w / 2.0 + x * un;
}
上述两个函数就实现了将某个点数学的x、y坐标转换为canvas的坐标的功能。
界面模块与计算模块的对接。详细地描述 UI 模块的设计与两个模块的对接,并在博客中截图实现的功能。
模块对接
- 使用CORE模块导出得ShapeList存储各个Shape
- 遍历ShapeList使用Shape类的intersect接口计算Point集合
- 使用ShapeList的add_shape和delete_shape添加删除某个Shape
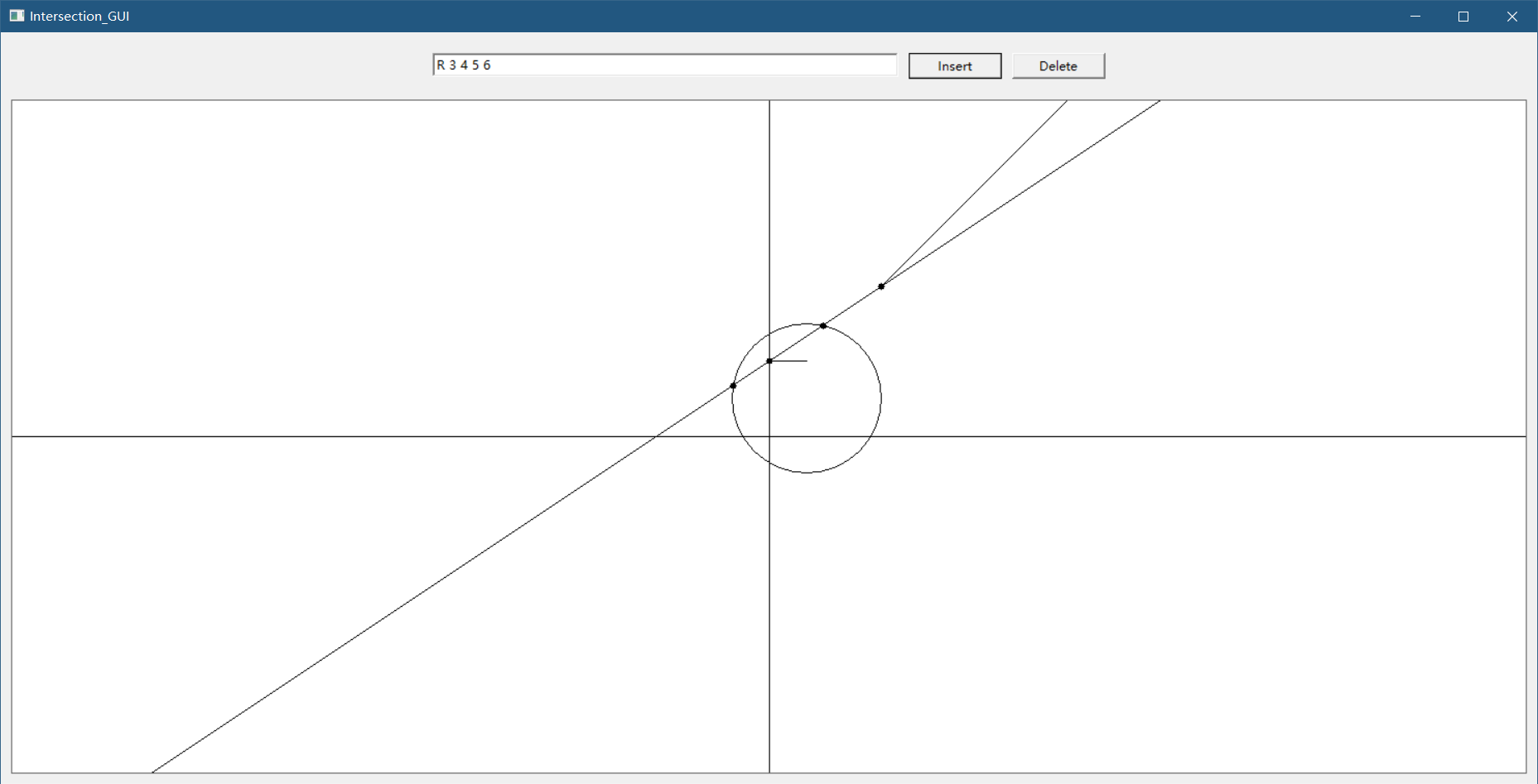
如图,绘制了圆、直线、线段、射线及其交点
描述结对的过程,提供两人在讨论的结对图像资料(比如 Live Share 的截图)。
过程:一者提出设计方案,一者进行其实现,大致按照了领航员的结对方式。
截图:
看教科书和其它参考书,网站中关于结对编程的章节,例如:http://www.cnblogs.com/xinz/archive/2011/08/07/2130332.html ,说明结对编程的优点和缺点。同时描述结对的每一个人的优点和缺点在哪里(要列出至少三个优点和一个缺点)。
结对编程的优点:
一边测试一边写代码,确保代码的可靠性、确保效率,互相监督、互相学习,能从队友身上学到很多东西;
结对编程的缺点:
缺乏监督或者自觉可能会导致一人干活,一人休息;
我的优点:
在白天保证随叫随到、能全心全意编程、从队友身上学到了很多知识;
我的缺点:
缺乏设计思路,大多数时间跟随队友的思路;
结对伙伴的优点:
思路清晰、程序架构好、能解决难题
结对伙伴的缺点:
有时因为要完成其他作业没时间编程
在你实现完程序之后,在附录提供的PSP表格记录下你在程序的各个模块上实际花费的时间。
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | ||
| · Estimate | · 估计这个任务需要多少时间 | 10 | 20 |
| Development | 开发 | ||
| · Analysis | · 需求分析 (包括学习新技术) | 60 | 30 |
| · Design Spec | · 生成设计文档 | 100 | 60 |
| · Design Review | · 设计复审 (和同事审核设计文档) | 30 | 30 |
| · Coding Standard | · 代码规范 (为目前的开发制定合适的规范) | 30 | 30 |
| · Design | · 具体设计 | 200 | 300 |
| · Coding | · 具体编码 | 400 | 600 |
| · Code Review | · 代码复审 | 100 | 200 |
| · Test | · 测试(自我测试,修改代码,提交修改) | 100 | 200 |
| Reporting | 报告 | ||
| · Test Report | · 测试报告 | 30 | 30 |
| · Size Measurement | · 计算工作量 | 30 | 20 |
| · Postmortem & Process Improvement Plan | · 事后总结, 并提出过程改进计划 | 30 | 30 |
| 合计 | 1120 | 1550 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号