
ML一些零散记录
- 朴素贝叶斯的假定条件:变量独立同分布
- 一般情况下,越复杂的系统,过拟合的可能性就越高,一般模型相对简单的话泛化能力会更好一点,增加隐层数可以降低网络误差(也有文献认为不一定能有效降低),提高精度,但也使网络复杂化,从而增加了网络的训练时间和出现“过拟合”的倾向, svm高斯核函数比线性核函数模型更复杂,容易过拟合
- AdaBoost算法中不同的训练集是通过调整每个样本对应的权重来实现的。开始时,每个样本对应的权重是相同的,即其中n为样本个数,在此样本分布下训练出一弱分类器。对于分类错误的样本,加大其对应的权重;而对于分类正确的样本,降低其权重,这样分错的样本就被凸显出来,从而得到一个新的样本分布。在新的样本分布下,再次对样本进行训练,得到弱分类器。以此类推,将所有的弱分类器重叠加起来,得到强分类器。
-
Bagging与Boosting的区别主要是取样方式不同:Bagging采用均匀取样,而Boosting根据错误率取样。Bagging的各个预测函数没有权重,而Boosting是有权重的。Bagging的各个预测函数可以并行生成,而Boosing的各个预测函数只能顺序生成。
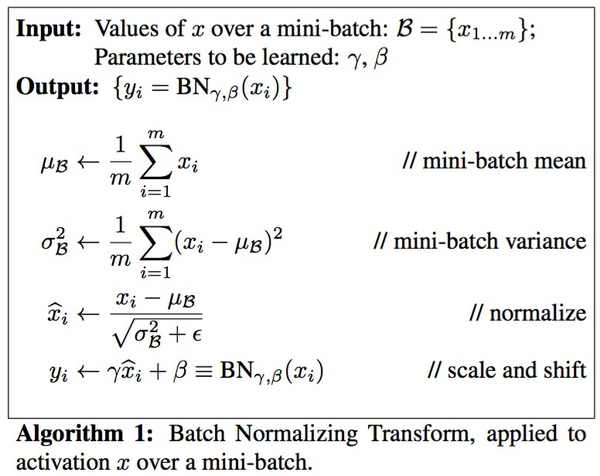
- 神经网络学习过程的本质就是学习数据分布,在训练数据与测试数据分布不同情况下,模型的泛化能力就大大降低;另一方面,若训练过程中每批batch的数据分布也各不相同,那么网络每批迭代学习过程也会出现较大波动,使之更难趋于收敛,降低训练收敛速度。通常在输入层做标准化/归一化并不能保证每次minibatch通过每个层的输入数据都是均值0方差1,因此我们可以加一个batch normalization层对这个minibatch的数据进行处理。但是这样也带来一个问题,把某个层的输出限制在均值为0方差为1的分布会使得网络的表达能力变弱。因此又给batch normalization层进行一些限制的放松,给它增加两个可学习的参数 β 和 γ ,对数据进行缩放和平移,平移参数 β 和缩放参数 γ 是学习出来的。极端的情况这两个参数等于mini-batch的均值和方差,那么经过batch normalization之后的数据和输入完全一样,当然一般的情况是不同的。Batch normalization输出计算的统计量会受到batch中其他样本的影响(对一个batch里所有的图片的所有像素求均值和标准差。而instance norm是对单个图片的所有像素求均值和标准差)由于shuffle的存在,每个batch里每次的均值和标准差是不稳定,本身相当于是引入了噪声。而instance norm的信息都是来自于自身的图片,某个角度来说,可以看作是全局信息的一次整合和调整。对于训练也说也是更稳定的一种方法。在RNN里面(看hinton的layer normalization想到的), 超分辨率或者对图像对比度、亮度等有要求的时候不建议使用BN。
![]()
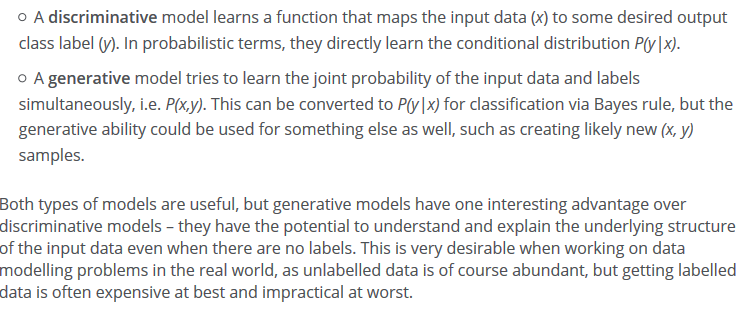
- 生成模型是通过联合概率分布来求条件概率分布,而判别模型是通过数据直接求出条件概率分布,换句话说也就是,生成模型学习了所有数据的特点(更宽泛,更普适),判别模型则只是找出分界(更狭隘 更特殊)。
判别模型求解的思路是:条件分布------>模型参数后验概率最大------->(似然函数参数先验)最大------->最大似然
 即为求条件分布的参数
即为求条件分布的参数关于训练数据(C,X)的后验分布
生成模型的求解思路是:联合分布------->求解类别先验概率和类别条件概率
常见的判别式模型有:
- Logistic regression(logistical 回归)
- Linear discriminant analysis(线性判别分析)
- Supportvector machines(支持向量机)
- Boosting(集成学习)
- Conditional random fields(条件随机场)
- Linear regression(线性回归)
- Neural networks(神经网络)
常见的生成式模型有:
- Gaussian mixture model and othertypes of mixture model(高斯混合及其他类型混合模型)
- Hidden Markov model(隐马尔可夫)
- NaiveBayes(朴素贝叶斯)
- AODE(平均单依赖估计)
- Latent Dirichlet allocation(LDA主题模型)
- Restricted Boltzmann Machine(限制波兹曼机)
- 联合概率公式:$p(x,y) = p(x|y)p(y) = p(y|x)p(x)$,若x,y独立,则公式退化为$p(x,y) = p(x)p(y)$
- 从联合概率公式可以推导出条件概率公式:$p(x|y) = p(x,y)/p(y)$ $p(y|x) = p(x,y)/p(x)$
- 全概率公式:$p(x)=\sum_{m=1}^Mp(x|y_m)p(y_m)$,其中$\sum_{m=1}^Mp(y_m)=1$
- 贝叶斯(后验概率)公式:$p(y_m|x) = p(y_m,x)/p(x) = p(x|y_m)p(y_m)/\sum_{m=1}^Mp(x|y_m)p(y_m)$
$p(y_m|x)$:后验概率
$p(x|y_m)$:先验概率
$p(y_m)$:似然函数
$sum_{m=1}^Mp(x|y_m)p(y_m) = p(x)$:证据因子


 浙公网安备 33010602011771号
浙公网安备 33010602011771号